百香果采摘末端执行机构的总体结构设计与分析*
2021-07-30 01:12黄才贵辛华健
南方农机 2021年14期
黄才贵,辛华健
(1.南宁学院,广西 南宁 530200;2.广西工业职业技术学院,广西 南宁 530001)
0 引言
热带和亚热带地区富产百香果,我国百香果种植主要分布在南方,如广东、广西、云南、福建、台湾等地区,这些地区气候偏暖和。百香果成熟后发出10多种水果香味,果汁酸甜爽口、口感浓郁,气味芳香,所以可以称之为饮料之王[1-4]。同时,百香果富含氨基酸、维生素等营养成分[5]。随着百香果的市场需求不断加大,在广西南宁、玉林、百色等地均有大量种植,种植的主要是紫百香果。近几年,百香果作为南方部分地区脱贫致富的农作物,市场前景好[6-7]。当大量采摘百香果时,人工分级就变得复杂,消耗大量的人力物力。因此,如何发挥广西省百香果的资源优势和产量优势,扩大百香果的销售,已成为目前面临的一个重大问题。
近年来,尽管我国农业机械化发展较快,但整体水平还比较落后,特别是在水果采摘的机械化装备上。目前,百香果采摘主要还是以人工为主,其劳动强度大、效率低、人工成本高且安全性低。目前也出现一些水果采摘的机器人或者装置,但大多还是处于研究试验阶段,还不能百分百做到柔性采摘,在采摘过程中容易出现挤破果实的现象,采摘技术还不够成熟。关于百香果采摘的装置或者机械手,目前尚未发现。基于此,笔者设计了一种结构简单合理且轻便的百香果采摘末端执行机构。
1 总体结构方案设计及原理
1.1 总体结构方案
百香果采摘末端执行机构的总体设计图如图1所示,包括驱动部分、盘座部分、拉绳、关节一、关节二、关节三,其结构连接关系为:拉绳下端固定在驱动部分上,拉绳依次穿过盘座部分、关节一、关节二,拉绳上端固定在关节三上,关节一底部铰接于盘座部分上,关节二底部铰接于关节一上端,关节三底部铰接于关节二上端。

图1 总体设计图
1.2 工作原理及优点
机械手中的弹簧A、弹簧B、弹簧C、弹簧D的弹力大小对比为:弹簧B<弹簧C<弹簧D<弹簧A。弹簧B、弹簧C、弹簧D弹力依次增大,因为弹力越小使得变形量越大,则收缩越快,使得关节一、关节二、关节三依次向内收缩包络夹持果实。弹簧A弹力最大,目的是等关节一、关节二、关节三对果实夹持完了之后,再克服压力球的力,当达到或大于压力球的力时,则会在弹簧A大变形之后快速驱动拉绳而带动活动盘以上的部件和果实快速旋转,将果实旋转摘下。
工作时,拉动驱动杆,通过拉杆带动弹簧A再带动拉绳,拉绳驱动关节一、关节二和关节三往内转动包络夹持果实,继续拉动驱动杆,则滑块克服压力球的作用,在拉绳的驱动下活动盘被快速拉动旋转,进而带动三个关节以及被包络的果实快速旋转,将果实摘下,松开驱动杆后,在扭簧的驱动下活动盘回位,关节一、关节二和关节三张开,即可拿出果实。
机构具备的优点为:其中的关节一、关节二、关节三处采用三级的弹簧设计,实现三个关节的逐步按顺序夹持的动作,采摘时可以保证一定的柔性夹持,尽可能避免百香果由于压力过大受损。此外,固定座上设置的压力球,可以在果实被机械手包络之后,继续拉动驱动杆使得活动盘旋转,从而让果实被快速摘下,结构设计合理适用。
2 各关键部件的结构设计
2.1 三指柔性关节的设计
三指柔性关节的结构如图2所示,关节一上固定设置有套环A,关节二上固定设置有套环B,关节三上固定设置有套环C,套环A、套环B、套环C上设置有孔洞,拉绳依次穿过套环A、套环B、套环C上的孔洞,拉绳上端与套环C固定连接。

图2 三指柔性关节的结构
2.2 驱动部分设计
驱动部分结构如图3所示,包括驱动杆、拉杆、连接盘A、弹簧A、连接盘B,拉杆的材质为橡胶,其结构连接关系为:拉杆下端固定连接驱动杆上端,拉杆上端固定连接连接盘A,连接盘A和连接盘B之间连接设置有弹簧A,弹簧A下端固定连接连接盘A,弹簧A上端固定连接连接盘B,拉绳的下端固定连接在连接盘B上。关节一和活动盘之间设置有弹簧B,关节一和关节二之间设置有弹簧C,关节二和关节三之间设置有弹簧D,其结构连接关系为:弹簧B下端固定连接活动盘,弹簧B上端固定连接关节一;弹簧C下端固定连接关节一,弹簧C上端固定连接关节二;弹簧D下端固定连接关节二,弹簧D上端固定连接关节三。

图3 驱动部分结构
2.3 盘座部分设计
盘座部分结构图如图4所示,包括固定盘、活动盘、固定座,其结构连接关系为:固定座固定同轴安装在固定盘上,活动盘同轴安装在固定座上。固定盘外圈处设置有套管B,套管B穿过固定盘,活动盘外圈处设置有套管A,套管A穿过活动盘,套管B和套管A上设置有通孔,拉绳穿过套管B和套管A上的通孔。活动盘和固定座之间设置有扭簧,扭簧上端固定连接活动盘,扭簧下端固定连接固定座。
固定盘上设置有滑槽,滑槽内设置有压力球和弹簧,弹簧一端固定连接滑槽,弹簧另一端固定连接压力球。活动盘下部设置有滑块,滑块顶部固定连接在活动盘下部,滑块底部滑动安装在固定座的滑槽内。
如图5所示,压力球中设置有限压结构,包括凹槽、压力珠、弹簧E,其结构连接关系为:弹簧E设置在凹槽内一侧的孔洞里,弹簧E一端固定连接孔洞底部,弹簧E另一端固定连接压力珠。活动盘和固定座之间设置有扭簧,扭簧上端固定连接活动盘,扭簧下端固定连接固定座。
3 结构的力学分析与有限元仿真
在工作过程中,需要驱动拉绳拉动套环进而驱动关节的动作,此时需要考虑套环的刚度和强度、变形等是否符合要求,变形过大或者过小、刚度和强度不够都会影响关节驱动动作和后续的夹紧动作,因此,需要对套环和关节的连接进行有限元分析。对其有限元分析的基本思路如下。
1)首先,利用三维数字设计软件将三维数字模型建立好,再将模型导入到有限元分析软件中,进行网格划分,绘制出关节三维数字模型如图6所示。
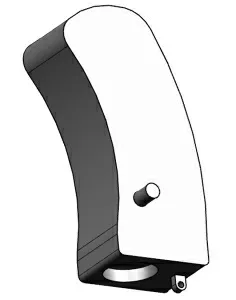
图6 关节三维数字模型
2)接着进行模型的前置处理,在有限元分析软件中建立力学关系,对于静态的力学分析采用静力结构分析,导入到有限元分析软件的运动动力学分析模块,然后进行网格划分,选择的网格划分方式为自动划分,得到的划分结果如图7所示。

图7 网格划分结果
3)然后设置模型的材料属性,赋予材料特性,主要包括材料的类型、名称、弹性模量、泊松比、质量密度、抗拉强度、屈服强度等等,添加材料属性;设置材料属性:设置关节的材料为ABS材质,材料库中添加ABS材料,并将材料性能赋予到材料中,各项参数如表1所示[8]。

表1 ABS材质部分属性
4)对模型的受力点进行约束和载荷的施加,设置好约束类型,添加合适的载荷,如图8所示,施加的载荷在套环处。

图8 约束和载荷的施加
5)最后,进行后处理分析,结算之后查看总变形云图和等效应力云图,分析云图的最大值,并对比分析是否符合设计要求,再求解,得到结果如图9所示为总变形云图,如图10所示为等效应力云图。

图9 总变形云图

图10 等效应力云图
由有限元分析结果可知,最大变形量为0.022 1 mm,变形量极小,符合要求;最大应力点为5.003 MPa,远小于屈服强度,符合设计要求。
4 结语
通过对其手指关节外形及内部传动结构的设计,实现一定柔性的果实采摘,保证采摘果实的完好性以及采摘的有效性和稳定性。最后,经过有限元分析,说明了设计的结果符合要求,这为之后百香果采摘机械化提供一定的技术基础和参考。
猜你喜欢
体育科技文献通报(2022年3期)2022-05-23
建材发展导向(2021年7期)2021-07-16
特种油气藏(2021年2期)2021-06-19
煤矿安全(2021年2期)2021-03-04
智慧少年·故事叮当(2019年11期)2019-12-09
数学大王·趣味逻辑(2019年9期)2019-10-09
智慧少年·故事叮当(2019年7期)2019-08-09
智慧少年·故事叮当(2019年5期)2019-06-11
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03