
基于多元信息融合的GPS导航定位跟踪研究
2021-07-30 02:38刘洋
通信电源技术 2021年7期
刘 洋
(淮北师范大学 信息学院,安徽 淮北 235000)
1 信息融合技术系统结构模型
1.1 集中式系统结构
集中式系统结构主要是以传感器为主要信息获得渠道,在对接入信息进行预处理以后将信息传送到信息融合处理中心,在信息融合处理中心里进行信息的控制与选通,得到准备结果以后将信息传送出去[1]。在这种系统下,虽然所得信息的准确度和真实度都比较高,但是在信息融合处理中心中,信息往往需要进行大量复杂的融合计算,系统并不足够稳定。
1.2 分布式系统结构
和集中式系统结构相较而言,分布式系统结构更为简便,其对于通信的要求也更低。在分布式系统结构中,从传感器中得来的信息经过预处理之后需要先进行信息跟踪与信息分类,随后再传送到融合计算中心进行信息数据的控制与选通。这种方式虽然简便,但是从某一方面来看,此系统结构下得来的信息会有一定程度的损耗[2]。
2 信息融合的卡尔曼滤波法
在嵌入式约束法中,卡尔曼滤波法是其中最基础的一种方法,主要应用于对繁杂、多元信息的处理[3]。当系统噪声和传感器噪声均是高斯白噪声的时候,若此时的系统信息处于线性特征的话,那么KF就能够在统计中得到最优估算结果。其中KF又可以分为DKF和EKF,DKF也就是分散卡尔曼滤波。在DKF中,每个传感器独立工作,互不干扰,所以假如其中的某一个传感器出了问题,计算的结果不正确,那么也不会过多影响到整体信息。EKF是扩散卡尔曼滤波,它的数据比较紧凑,各个传感器之间也会有一定的关联性,优势在于能够较好地降低因数据不稳定等出现的计算误差。另外,卡尔曼滤波法虽然应用较广,但是也具有一定的缺陷,它需要在较为系统地获得物理特性以后,在得知状态量均方差的前提下,才能经由各种操作产生准确结果[4]。
3 卡尔曼滤波原理
卡尔曼滤波法主要是对还未滤波的物理系统中的误差特性进行特定计算与推导,并从中获得需要的信号,然后再通过处理信号得出滤波参数的最佳估计值。这一算法采用的是逐渐递推的方式,若想得到下一时刻的状态量,就需要分析上一时刻的状态量,结合统计误差进行递推。在导航系统中,由于其能够处理各样随机信号,因此具有一定的运用价值与运用意义[5]。
卡尔曼滤波法处理的对象是线性系统,主要来源于已得知干扰信号的统计特性,这一信号大多为随机信号。处理算法为:

式中,X(k)表示高斯白噪声,k表示离散时间,Y(k)表示测量噪声,V(k)表示观测噪声。公式中观测数值并不等同于真实数值,其中会因为种种原因而存在一定的误差。在卡尔曼滤波法中出现这种误差的主要原因就是过程噪声和观测噪声,其中过程噪声来自外界的干扰,像在温度测量的过程中,阳光照射和自然风等都会对系统造成的一定的干扰,这个干扰就会产生过程噪声。另外传感器在测量中难免会出现些许误差,这种误差则很容易引起观测噪声。这两种噪声都可以在统计的方法下得到[6]。
4 仿真分析
4.1 捷联惯导系统仿真分析
在MATLAB软件的帮助下,相关人员可以构建出捷联惯性导航系统的相关模型,然后再对模型进行验证计算,确定其可行性。其中,在汽车导航中,捷联式惯性导航系统会通过陀螺仪计算出车辆方位角的变化率,然后通过处理所得数据获得车辆的速度变化率。结合上述获得及推导得出的数据与车辆的初始位置就可以进行车辆定位。所以,在用MATLAB验证算法可行与否时,必须先借助仿真的方法获得车辆运动轨迹,然后再以合适的数据处理方法获得加速度等数值,结合惯导数学模型就可以得知车辆位置和车辆行驶速度等。随后,确定真实汽车此时所在的位置及行驶速度,通过对比就可以明确捷联惯性导航系统是否切实准确实用[7]。
在MATLAB仿真下的捷联惯性导航系统模型如图1所示,主要由轨迹发生器、SINS解算法等组成[8]。

图1 捷联惯导系统图
4.2 惯导系统仿真
在惯性导航系统的仿真测算中,以具体例子阐述如下。导航系统初始化以后,设定初始位置为北纬15°、东经100°,初始姿态角为90°,初始速度为0,然后以如下方式进行车辆运动。(1)静止5 s不动;(2)以1 m/s2的加速度进行20 s的加速运动;(3)以匀速直线的方法行驶200 s;(4)转动角速度0.9°,保持匀速开始100 s的曲线运动;(5)继续以匀速直线的方法行驶200 s;(6)以-1 m/s2的加速度进行20 s的减速运动。
在完成上述运动以后可以利用仿真软件制出模拟的车辆运动轨迹图,并根据轨迹图算出车辆加速度与偏转角参数等数据。原始运动轨迹与惯导生成轨迹如图2所示。

图2 原始运动轨迹与惯导生成轨迹
在误差的累计下,惯性导航中对车辆定位的误差越来越大。由此可见,行驶时间越长,惯性导航系统的误差就越大,因此若想在汽车导航系统中选用惯性导航系统,那么行驶时间就不能过久。基于此,就需要探索一种在时间累计下误差稍小的导航方式[9]。
4.3 组合导航系统仿真分析
在组合导航系统中,同样利用MATLAB软件,先以仿真的方法在获得模拟的车辆行驶轨迹图后算出加速度等数据,再利用四元数运算获得车辆偏转角度及车辆行驶速度等信息。对车辆进行定位后,比对真实车辆行驶轨迹,可得到如图3所示的对比图。
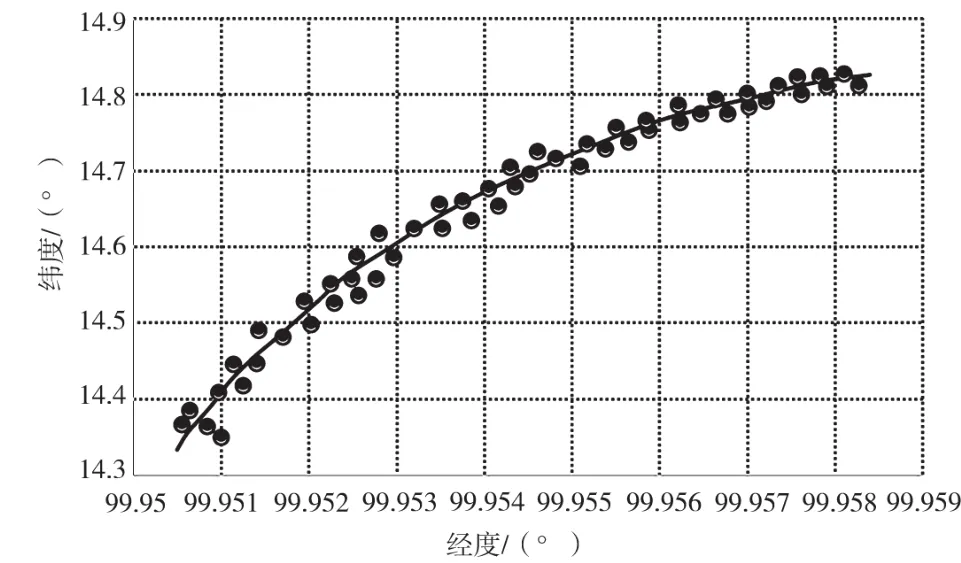
图3 原始运动轨迹与GPS定位
分别对捷联式惯性导航系统与组合系统进行545 s的仿真,同时计算出捷联式惯导、GPS以及组合导航3种情况下的的速度误差,对比如图4和图5如示。图4中横坐标为时间,纵坐标为位置误差值。图5横坐标为时间,纵坐标为速度误差值。

图5 速度误差对比图
从图4和图5可以知,相比于单一的惯性导航系统与GPS导航系统而言,组合导航系统在定位车辆和计算车辆行驶速度方面的精确度更高。由此可见,组合导航系统具有一定的实用推广价值[10]。
5 结 论
汽车在受外界因素的干扰时,卫星导航测速得到的数据含有噪声数据。本研究采用卡尔曼滤波器实现了车辆定位和计算车辆行驶速度方面的组合导航,提高了GPS导航定位的精度,因此卡尔曼滤波对提高卫星导航精度效果比较理想。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
舰船科学技术(2022年10期)2022-06-17
军民两用技术与产品(2021年7期)2021-10-13
科学与财富(2021年33期)2021-05-10
数字海洋与水下攻防(2020年5期)2021-01-04
北京航空航天大学学报(2018年1期)2018-04-20
导航与控制(2017年6期)2017-12-20
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
火控雷达技术(2016年1期)2016-02-06
