油气管道内部智能巡视小车设计
2021-07-29 14:04江苏理工学院机械工程学院康绍鹏孙文杰
电子世界 2021年13期
江苏理工学院机械工程学院 徐 倩 康绍鹏 陈 俊 孙文杰 刘 明
我国陆上油气的运输方式以管道运输为主,干线管道运力充足,管道网络化程度高,对我国的发展极为重要。但部分油气管道老化,安全隐患突出,管道的安全巡检不可忽视。目前普通轮式管道检测机器人地形适应能力不足,无法完全应对复杂管路内部的环境,不适合长距离长时间作业。对此,设计了一款油气水管道内部智能巡视小车来提高管道巡检水平。该小车采用STC89C52单片机为核心,通过红外传感器、WiFi模块、摄像头等技术收集数据实时反馈。经模拟测试,该小车可正常运行并及时发现事故隐患,能改善人工工作,降低检查成本。
随着我国油气进口量的不断增加以及天然气资源合理开发利用水平的不断提高,管道运输业不断蓬勃发展。到2017年底,我国管道运输年产量在1522万t左右。油气管道运输作为五大运输方式之一,在国民经济中占有重要地位,但随着管道建设速度的加快,长期使用的油气管道存在的安全隐患逐渐增多,现已达到或超出使用年限,便极易出现输送物泄露、爆炸、污染等事故,这也是管道运输业所面临的主要威胁,而现阶段的处理方法具有较多的局限性。
综合国内外研究现状,管道勘测机器人研究多年,并取得了丰硕的成果,在管道检测中已经广泛应用,但由于现存市场中管道检测机器人本身存在的缺点,以及复杂管道工况、长距离作业、地形适应能力、效率等问题较为突出,且缺少多方位自动感应、自动/遥控自由切换、飞行/行走模式自由切换等智能化功能。为解决上述问题,针对高网络化程度管道内部的复杂性,结合轮式机器人、无人机等优点,设计出一种低成本、低功耗、可靠性高,能在复杂环境下运行,并能够实时监控油气管道内部状态的小车,对油气管道巡检监测具有重要意义。
1 小车结构设计
采用三维建模软件Soliworks对油气管道内部智能巡视小车机器人建模,主要由底盘结构、红外传感器、多位姿高清摄像头、麦克纳姆轮、四旋翼飞行器及微电控制系统,其整体结构如图1所示。

图1 小车整体结构示意图
车体前段设置四个红外传感器,分为上下两对,下部为红外寻迹模块,上部为红外避障模块。小车采用高清摄像头,可对所拍摄的图像进行压缩,利于远程图像的传输,且摄像头能够保存不少于1000幅高质量的JPEG图片。摄像头底座设置舵机与车体相连,可实现360°旋转无死角拍摄,摄像头支架内部设置一舵机,实现摄像头俯仰转动。油气水管道内部存在障碍物、沉淀物,普通轮式管道检测机器人地形适应能力差、与管道内壁摩擦力小,履带式管道检测机器人速度相对较低、效率低、运动噪声较大,故使用四轮驱动的方式,且四个驱动轮均为麦克纳姆轮,减速电机直接与轮相连,通过左右轮差速旋转的方式,使小车实现全方位移动的功能。飞行时采用微型四旋翼飞行器,旋翼均匀布置在车体两侧,在直管道以及坡度较大管道时,可切换成飞行模式,以实现避障。车体正中为单片机控制板,STC89C52型单片机作为主控制器,开关、电池等辅件进行电控硬件系统设计。应用Keil4对程序进行设计,实现了寻迹、红外避障、旋翼飞行、遥控等功能。单片机控制板下侧放置WiFi蓝牙控制模块,节约空间的同时,保证信号正常输出。
2 硬件电路设计
2.1 主系统
小车主系统采用STC89C52型单片机为控制核心,开发板电路如图2所示。

图2 主系统电路图
2.2 电机驱动模块
小车动力部分采用减速直流电机,并采用双L293D芯片电机驱动板进行控制,电机驱动电路如图3所示。

图3 电机驱动电路图
2.3 避障循迹模块
小车可自行实现避障、寻迹,均采用红外传感器,并由LM339芯片进行控制,避障寻迹模块电路图如图4所示。

图4 避障寻迹模块电路图
2.4 WiFi蓝牙模块
小车可远程遥控进行人为切入控制。利用安卓手机作为上位机发出命令,无线处理模块和单片机协同操作从而达到对车体的中远距离实时控制和动作。无线模块负责接收信号和数据传输,安卓客户端负责发送控制信号,摄像头采集图像通过WiFi模块的无线信号传回手机,用户可通过电脑以及手机端APP实现实时控制智能小车进行前进、后退、转弯、停止以及速度等轮式行走与旋翼飞行躲避障碍等响应。WiFi蓝牙模块接口电路如图5所示。
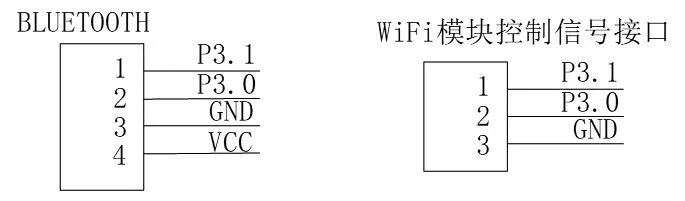
图5 WiFi蓝牙模块电路图
3 程序设计
智能巡视小车的地面运行方式主要包括自动寻迹、自动避障和遥控共三种功能。其功能选择是通过人员按压开发板上的按键来调节小车运动方式。
科/儿科的经验直接挪用至产前检测。但是现有经验至少可以说明对于疑难遗传病,高通量测序具有较高的辅助诊断价值,因此,对于产前发现胎儿结构畸形或发育异常,常规手段无法确诊的时候,应用高通量测序作为补充检测是可行的。
自动循迹,自动寻迹采用红外传感器,置于智能巡视小车车头下端两侧,小车沿着黑线行驶,当黑线位于车头两侧红外传感器的中间时,则小车直行;当小车头部左侧的红外传感器感应到黑线时,右侧没有感应到黑线,小车将会向左微转一定角度,当右侧红外传感器感应到黑线时,左侧红外传感器没有感应到黑线,小车将会向右微转一定角度,循环此类过程,左右两侧红外传感器不断检测是否感应到黑线。程序设计流程如图6所示。

图6 自动寻迹
自动避障,自动避障传感器位于车头上端两侧,当车头左右两侧的红外传感器都无信号时,则小车前方无障碍,此时小车直行;当小车左侧传感器接收到信号,右侧无信号时,则小车左前方有障碍,右前方没有障碍,此时小车右转一定角度;当左右两侧传感器都接收到信号时,则表示小车左右两侧都有障碍,此时小车旋转180°,并通过左右两个传感器检测小车两侧是否有障碍,如果左前方无障碍,小车左转,右前方无障碍,右转,循环此类过程,程序设计流程图如图7所示。

图7 自动避障
红外遥控是通过对应按键码完成相应动作,按下不同的方向键就可以实现小车的前后左右等移动。在函数中定义Type参数的值为红外遥控器上的按键的码值,各键码值所对应的功能如图8所示。

图8 红外控制
4 模糊控制器
在模糊控制系统中,传感器将采集到的信息转换为电信号,与设定值进行比较,得到偏差,再输入到模糊控制器中,偏差经模糊化处理为模糊集合,根据模糊规则对其进行模糊推理,便可得到模糊控制量,再进行解模糊后精确输出,并作用于被控对象。模糊控制流程如图9所示。

图9 模糊控制流程
4.1 模糊化
当小车行进发生偏移时,控制系统通过调整两侧驱动电机转速,对小车行进路线的偏移进行纠正,并让其回到正确的行驶位置。将巡视小车的车头方向相对于原行进方向的偏移角E作为模糊控制器的输入量,驱动轮转速差U作为模糊控制器的输出量。
在输入变量E的论域中,令语言值“NB”为重左偏、“NS”为左偏、“Z”为无偏移、“PS”为右偏、“PB”为重右偏;在输出语言变量U的论域中,取语言值:“NB”为左驱动轮速度比右驱动轮速度转速差较大、“NS”为左驱动轮速度比右驱动轮速度转速差较小、“Z”为左驱动轮速度与右驱动轮速度相等、“PS”为右驱动轮速度比左驱动轮速度转速差较小、“PB”为右驱动轮速度比左驱动轮速度转速差较大;隶属函数分布如图10所示。

图10 输入输出变量的三角函数分布
隶属度函数的离散化如表1所示。

表1 输入输出的语言变量值
4.2 模糊规则
控制规则是模糊控制器中模糊推理的依据,是模糊控制的核心。模糊规则表如表2所示。

表2 控制规则
4.3 模糊推理
根据模糊控制输入量和模糊控制规则,可通过模糊推理对模糊关系进行求解。采用推理查表法,将输入量偏转角与控制规则进行比较,最终得出输出量转速差。
4.4 解模糊
解模糊的方法有多重,主要有中位数法、加权平均法(即重心法)和最大隶属度法。本次采用加权平均法(重心法)对模糊量进行清晰化。模糊输出为权值,计算公式如下:

式中,Uu为各个输出模糊子集对应的模糊单点集的值;Ui为输出对该子集的隶属度;n为输出模糊子集数。
5 小车功能测试
5.1 地面与飞行测试
在地面能正常行驶,并能够自动躲避障碍物。在摩擦系数较小的,并有较小倾斜角度的管道中,能平稳行驶,并有足够动力完成上坡。
智能巡视小车在室内进行了大量的飞行测试,飞行器均能够实现平稳的起飞、悬停。并且飞行器在空中能够长时间稳定悬停,不会发生较大幅度的抖动或者偏移,也模拟小车在通道中的实际工作环境下,测试发现飞行器在较狭小的空间小,针对气旋等因素,飞行器仍旧可以稳定工作,可以在倾斜角度较大,甚至直管道中正常运行。
5.2 信号传输测试
在摄像头正常工作的情况下,测试手机上接受信号的稳定性和延时性,进行了大量的测试后得出,手机接收画面的延时很短,不会影响对小车的操作,画面也一直十分稳定,偶尔出现较为模糊的情况,在夜晚打开探照灯的情况下同时也进行了测试,测试结果基本一致。
5.3 远程操控测试
测试摄像头与探照灯进行图像实时传输,观察到小车接收到的动作指令与手机上所接收到的图像画面基本一致,延时很小,但当手机与小车距离很远的情况下,图像的延时有所加长,但基本不影响小车的具体操作指令,依然能顺利灵活完成所发出的所有指令。
结束语:油气管道内部智能巡视小车可以很好地适应复杂环境,在坡度较大的管道和竖直管道工况下行驶,并在运行过程中可以及时发现油气管道内部问题,通过PC机等智能终端连接无线路由器远程传输信息至客户端。用户可通过台式机或手机客户端远程连接实时监测,拍摄图片,操作简单,显示直观。解决了特殊环境下人工检测的隐患,降低了检查成本,具有一定的推广价值,市场前景广阔。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
汽车工程师(2021年12期)2022-01-18
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
中国新技术新产品(2020年4期)2020-05-05
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
科技创新导报(2016年27期)2017-03-14