
AI识别的智能垃圾桶
2021-07-29 11:59:24韶关学院智能工程学院谭伟健赵其湛陈水龙黄梓清洪远泉周永明
电子世界 2021年12期
韶关学院智能工程学院 谭伟健 赵其湛 陈水龙 黄梓清 夏 薇 洪远泉 周永明
针对垃圾分类存在的问题,本文提出一种具有AI人脸识别和垃圾识别功能的垃圾桶设计方案。用户通过人脸识别验证身份登录控制系统并在投放区域放置垃圾,系统调用卷积神经网络算法对垃圾进行识别并自动分类。同时搭配管理端APP,便于管理员及时对垃圾桶进行清理和维护。通过AI识别功能进行垃圾的智能分类,以及系统对于用户及时的反馈,可以提高用户的垃圾分类知识和个人对垃圾分类的积极性。
随着可持续发展越来越受人们的关注,对垃圾进行有效合理地分类处理也愈受重视。垃圾分类是一个世界范围的环境治理热点议题,也是经济高度发达国家在面对日益增长的垃圾产生量时必然选择的道路。在人工智能的大背景下,人们的日常生活中出现了越来越多的智能系统,其中,智能垃圾桶以及智能垃圾分类系统也慢慢地出现在人们的日常生活中。然而,市面上大部分智能垃圾桶都是采用扫二维码或者是磁感应ID卡来对用户进行交互的,存在二维码安全问题和ID卡携带不便问题,还有部分智能垃圾箱是用户将垃圾投入对应分类的垃圾箱的方式进行鼓励,然而这对于缺乏分类意识的用户是个考验,以及垃圾分类错误会给环卫工人带来负担。
针对这些问题,本项目提出了一种AI人脸识别垃圾桶设计方案。系统的硬件部分有摄像头、智能显示屏、机械装置、传动装置等模块组成。可以培养人们养成垃圾分类习惯,摆脱携带手机信息不安全或者ID卡出门麻烦的问题,投放错误的垃圾也会自动分类到相应的垃圾桶,为此也减轻了垃圾收集者的工作量。为共建美好社会,培养人们环保意识,提供了良好的保障。
1 系统总体设计
垃圾分类系统总体硬件设计框图如图1所示。垃圾分类系统的核心主控板采用STM32F103ZET6以及Jetson Nano作为双核心控制,其中STM32用来控制各类硬件外设功能模块;摄像头识别模块采用双摄像识别块,垃圾识别以及人脸识别分别各采用一个高清双目摄像头;光电传感器模块,用来检测装置内的光线情况,当亮度较低时则开启补光;超声波模块选用的类型为US-100,用来检测垃圾箱内的容量,防止垃圾溢出而没有得到及时的处理;电机驱动模块选用TB6600双驱动模块,用来驱动步进电机的运动;音乐播放模块选用DY-SV5W语音模块,用来给用户退出系统时播放一段愉快的音乐。
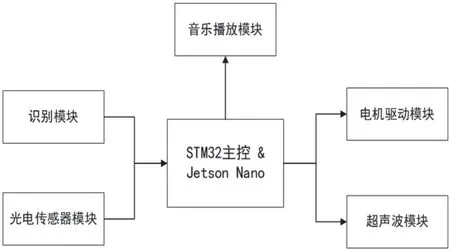
图1 硬件设计框图
语音识别:
采用LD3320语音模块,其本身也是一个C51开发板,通过串口通信方式就可以跟主控STM32进行通信,实现根据识别到的语音去执行对应指令的功能。通过直接连接继电器即可进行一些简易控制。但是本地语音模块是通过声纹去识别语音的,所以需要提前设定一些识别的语言进去,提前设定一些唤醒词和一些操作关键词等指令;除此之外,语音识别还可作为一项可扩展功能,为后续本地语音识别功能继续开发铺垫基础。识别语音过程如图2所示。
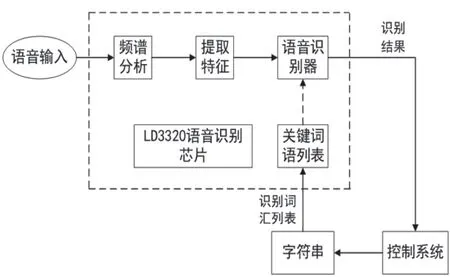
图2 识别语音过程
2 系统软件算法设计
2.1 垃圾种类识别算法
校园的垃圾种类相对较少,出于对本系统使用的场景,选取快递纸箱、饮料瓶、纸张、易拉罐、塑料袋等五类校园常见垃圾作为训练对象。垃圾识别是用超分辨率卷积神经网络算法,前期通过增加训练样本的数量,强化学习各种校园常见的垃圾类型,强化垃圾的特征性,从而达到预测正确的效果。通过加强训练量和保存设置好阈值,可以大大地提高垃圾识别正确率。垃圾分类系统选用inceptiongV3网络作为特征提取器进行垃圾种类的特征提取,在保留其运原有权值基础上,进行分类训练、强化学习,通过不断增大训练样本数量和调整识别的阈值,识别校园常见的垃圾样本、扩大垃圾分类的数据库,从而提高垃圾识别的正确性。垃圾种类识别流程图如图3所示。
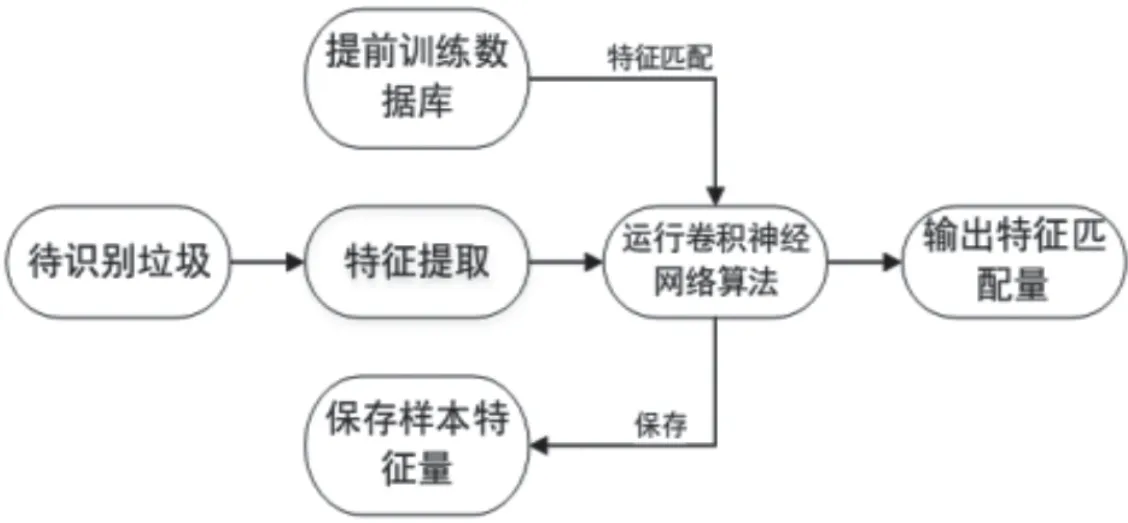
图3 垃圾种类识别算法流程图
2.2 人脸识别算法
前期需要搭建学校区域小范围的人脸识别库,学生可以选择线上或者线下收集脸部特征数据。具体地,学生可以通过线上发布自己的脸部数据或者通过系统的摄像头直接捕获自己脸部特征的数据。摄像头捕获到学生脸部的多个特征后,储存在人脸识别数据库中。完成面部特征的数据采集后,通过调用百度人脸识别的API以及使用FaceDataset提供的人脸识别构建库,再结合OpenCV开源计算机视觉库,三者构成系统的人脸识别数据库。OpenCV提供了图像处理方面的函数和工具类,其代码经过了优化,具有可移植性好、实时和执行效率高等特点。通过提取活体的面部特征,进行强化学习训练,可以将数据库扩展到一个十分可观的数据量,从而达到精准识别的效果。人脸识别算法流程图如图4所示。
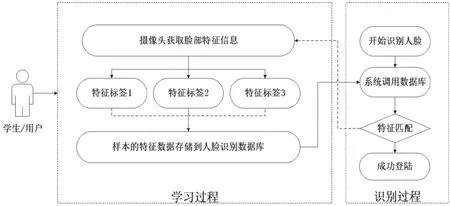
图4 人脸识别算法流程图
3 装置分类结构模型
系统设计有垃圾分类装置,装置的核心结构平面如图5所示。待分类的垃圾①在投放区完成识别后,③滚轴带动④小型传送带进行运动,运动到相对应的垃圾桶口②后,通过滑动推杆⑤将垃圾推进垃圾桶内。滑动推杆控制由PID自动控制算法执行,可以稳定准确将垃圾投放到相对应的垃圾桶,滑杆底部装有毛状丝带,用于接触传送带的表面,清除表面的碎屑。
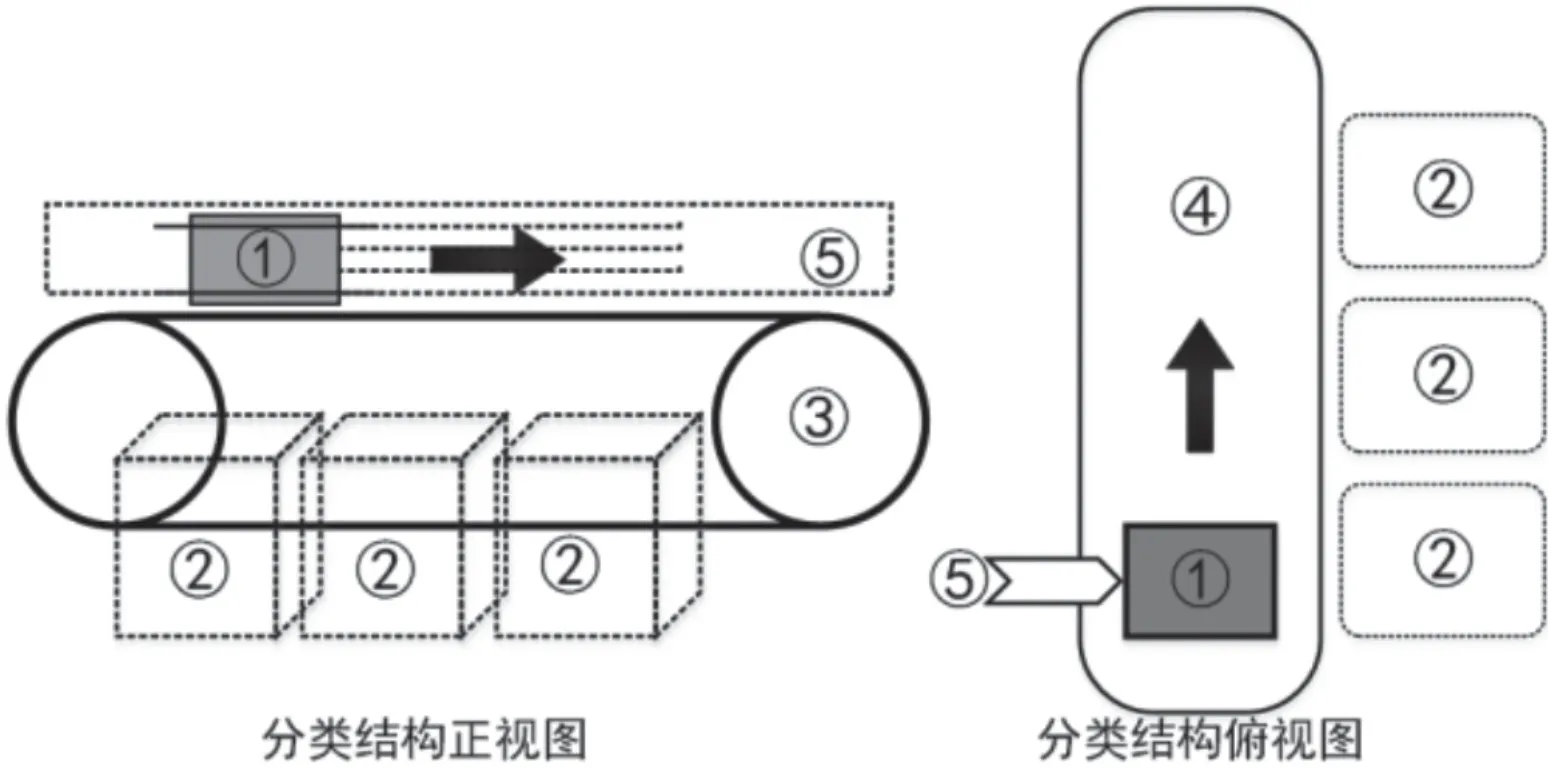
图5 分类结构平面图
4 系统测试
4.1 系统软件程序设计
系统人脸识别软件部分程序主要采用python进行程序语言的编写,通过在pycharm软件上实现人脸识别,将训练好的数据库以及代码移植到Jetson Nano上,就可以完成人脸识别的功能。系统的控制部分主要是通过C语言程序进行编写的,在Keil version5软件上进行实现的。只要将控制部分写好的代码烧录到系统的STM32主控板内就可以实现垃圾的运送功能。
4.2 系统功能测试
当系统的软硬件设计完成后,需要对系统的功能进行验证测试。首先,对人脸识别进行测试,当人们靠近垃圾桶摄像头区域时,摄像头能够很好地识别出人脸并登录系统;其次,登录系统后,显示界面OLED能够正常显示指引人们操作系统;在使用者的操作下,机械控制部分也能很好的完成垃圾的分类;除此之外,系统也能够正常完成垃圾桶容量的测距以及探测桶内温度的高低。总的来说,设计的AI人脸识别垃圾桶设计原理思路正确,技术功能可靠,具有很大的实用性。
结论:随着人工智能技术以及物联网技术的发展,通过机器学习算法搭载机械装置自动分类垃圾,大大提高了垃圾分类的效率,有效解决了人们培养垃圾分类习惯和意识等问题,在一定程度上也减轻了垃圾收集者的工作量,对改善环境以及提高人们的垃圾分类意识均有积极的推进作用。为共建美好社会,培养人们环保意识,提供了良好的保障。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28 06:14:40
作文中学版(2022年1期)2022-04-14 08:00:34
汽车工程师(2021年12期)2022-01-18 06:02:43
好孩子画报(2021年2期)2021-03-15 08:45:48
趣味(作文与阅读)(2021年11期)2021-03-09 06:37:08
趣味(语文)(2021年11期)2021-03-09 03:11:34
作文与考试·小学高年级版(2020年19期)2020-11-16 02:24:15
学生天地(2020年31期)2020-06-01 02:32:06
计算机工程(2015年8期)2015-07-03 12:19:07
汽车维修与保养(2015年8期)2015-04-17 03:32:59
