
自适应变结构的PI控制器设计
2021-07-29 07:33:02王皓天
微型电脑应用 2021年7期
王皓天
(陕西能源职业技术学院 机电与信息工程学院,陕西 咸阳 712000)
0 引言
永磁同步电动机转速环采用PI控制时,对于阶跃输入而言,输出响应会产生超调。由此,业内很多学者专家展开了一系列研究探索,有的提出采用加入过渡过程的方式来降低超调量[1]。有的学者提出可以通过输出微分负反馈方式来降低超调[2]。但这两种方式都具有不足之处,前者的过程函数非常复杂,难以计算。后者则由于微分器的加入,极大增加了测量噪声。为此,又有专家提出了可以采用伪微分反馈控制和IP控制方式,这两种控制都能够有效降低阶跃响应的超调,但同时会增大连续变化输入响应的稳态误差[3-5]。不仅如此,传统控制器在分析输入信号的类型时也只参考了阶跃信号这一种情况,其他情况皆需对控制器再次设计。基于此,本文分析设计了一种自适应变结构PI控制器,它能够根据输入信号的不同类型,自动选取对应的控制方式,实现最优控制。
1 IP控制器
采用预限停止积分型抗积分饱和方法[6]时的转速环IP控制器结构图如图1所示。
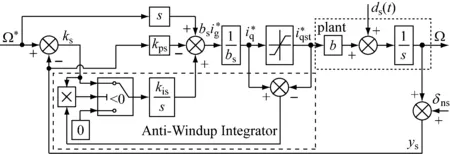
图1 IP控制器结构框图
由图1可知,系统的控制量表达式为式(1)。
(1)

排除反馈转速滤波、电流环带宽、控制量饱和的影响,把式(1)代入机械角速度的状态方程,从而获得系统的输出,如式(2)。
(2)
电流环的电流幅值和带宽均有一定限制,故而当输入阶跃信号时,系统对该信号不产生响应,导致输入微分前馈则基本不产生效果。系统的输出将变为式(3)。
(3)
据此可知,系统为典型的二阶控制系统。只要使阻尼比的取值大于1,系统即能够达到无超调的阶跃响应的效果,对比系统的阶跃响应在任意阻尼情况下都具有超调的PI控制器,其在抑制超调方面明显要更占优势。
但当输入连续变化的信号时,由于系统对该信号的微分量可以产生响应,此时的输入微分前馈则能够生效。由式(2)可知,此时IP控制系统具有稳态误差,相较于可以无误差连续跟踪输入信号变化的PI控制系统,其控制性能明显处于劣势。
2 变结构PI控制器
基于上述IP控制系统具有的响应性能差的缺点[7-8],分析设计了一种新的自适应变结构控制器,其控制结构图如图2所示。
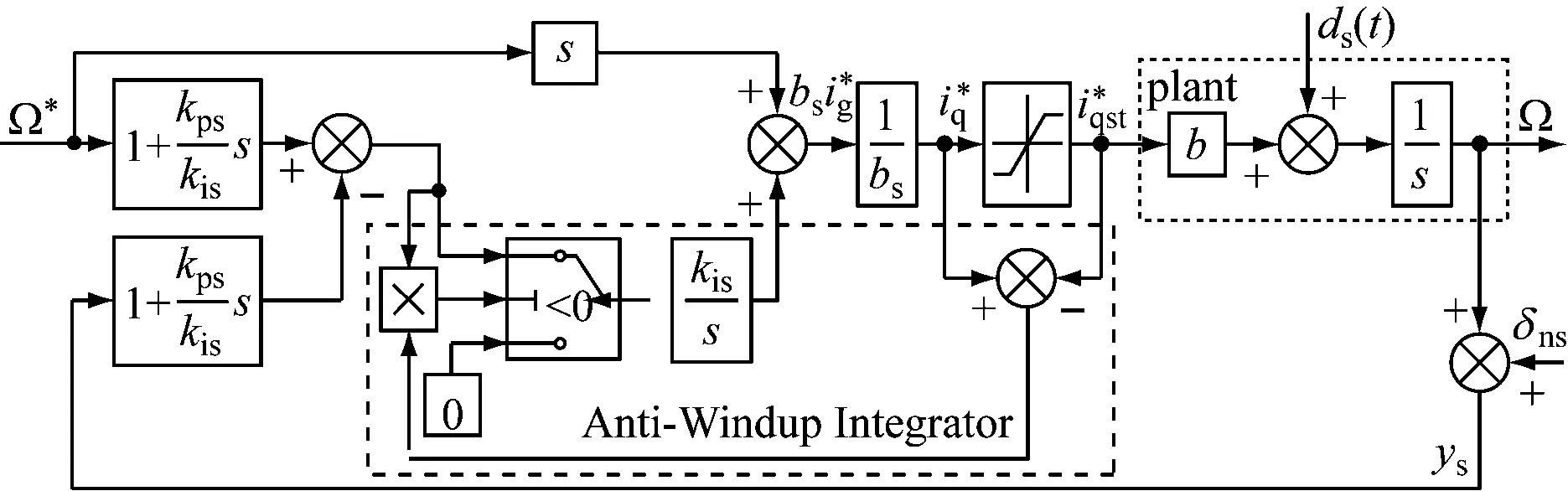
图2 变结构PI控制系统
该控制器能够根据输入信号的不同类型,选择最优的控制方式。即当输入信号分别为阶跃信号和连续变化信号时,控制器对应分别采用IP和PI控制。
若输入为阶跃信号,此时发挥控制作用的主要环节为给定的微分项,系统在首个周期即会发生饱和,与此同时积分环节无输入,抗积分饱和算法生效[9-10]。而第二个周期后的设定微分项由于为零,控制量也因此不能发生饱和,与此对应的加法器的输出即为积分环节的输入[11],进而控制器的等效结构图如图3所示。
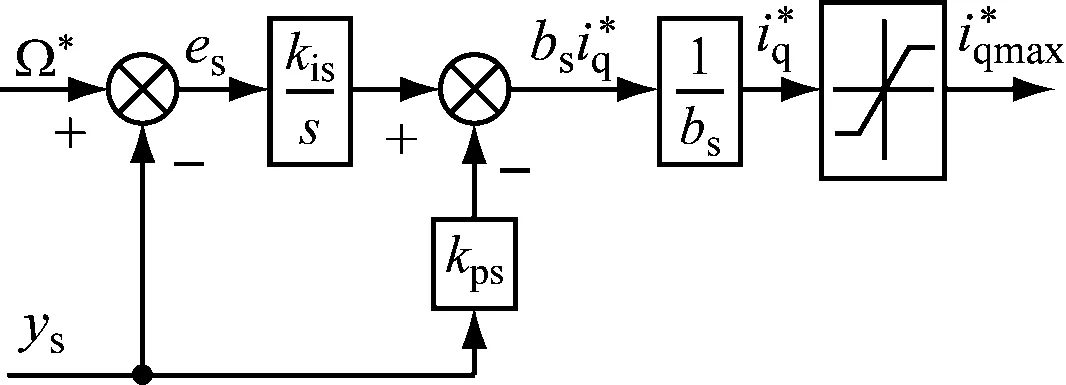
图3 阶跃输入下VSPI的等效结构图
3 仿真分析
接下来为了证实该控制器的效果,对其在阶跃信号和正弦信号作用下的响应特性以及稳定性分别进行了仿真分析。
3.1 阶跃信号作用
分别将VSPI、PI、IP控制系统在输入阶跃信号为80 rpm和800 rpm2种情况下进行了空载起动实验,输出动态响应波形如图4所示。
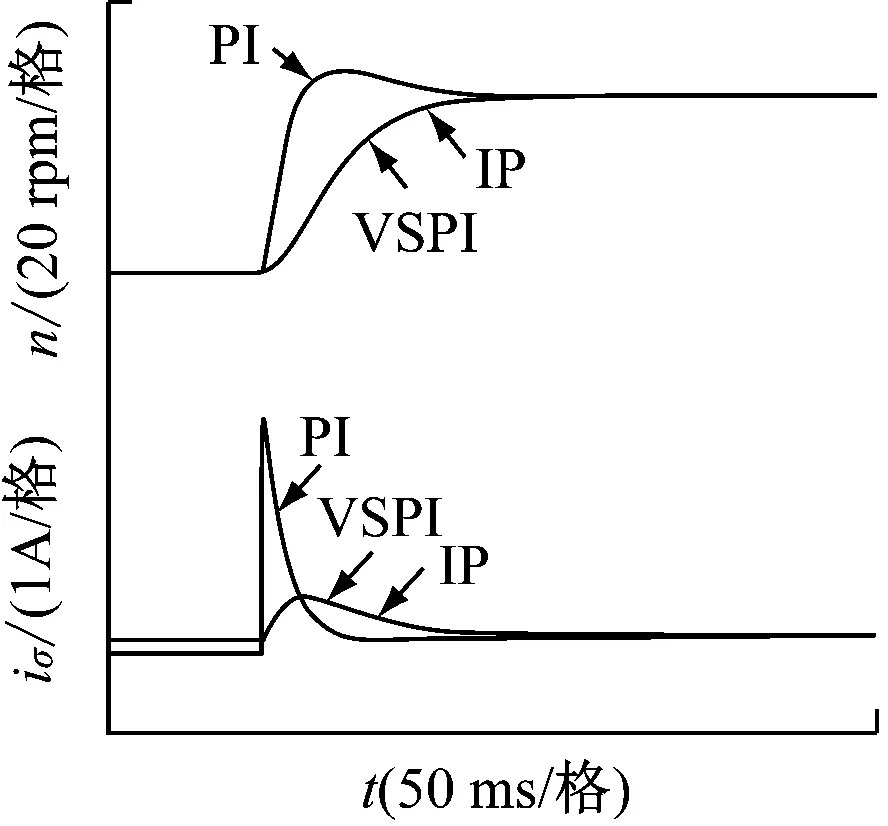
(a)80 rpm时的动态响应
由图4可知,VSPI与IP控制系统的动态响应曲线基本重合,相较于PI控制系统,不仅响应无超调而且平稳性也更优。
为了证实系统带宽ωn对转速响应的作用,这里假设阶跃输入信号为800 rpm,系统带宽ωn分别取80、160、320,最终的转速响应过程如图5所示。
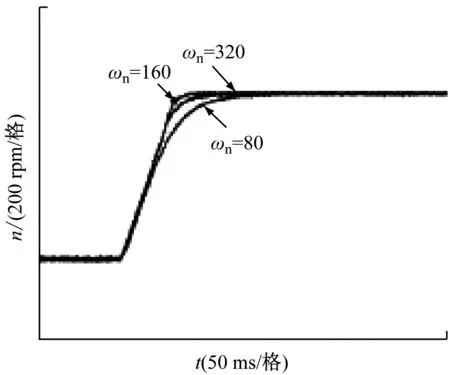
图5 不同ωn下空载起动时的转速响应
显然,ωn取值越大,系统响应的快速性越好,超调量也越小,诚然此种情况下快速性和超调之间是相互统一的[12]。
3.2 正弦信号作用
分别将VSPI、PI、IP控制系统在正弦输入信号作用下进行了空载启动实验,信号的幅值为500 rpm,频率为5 Hz,ωn为80,响应波形如图6所示。
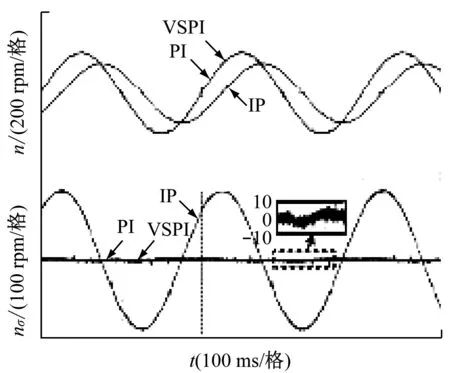
图6 正弦给定下的转速响应
由图6可知,VSPI、PI控制的误差范围分别为5 rpm和6 rpm,二者的转速响应曲线几乎完全重合,而IP控制的响应误差范围为340 rpm,所以VSPI、PI控制明显要优于IP控制。
3.3 抗干扰分析
要测试VSPI控制系统的抗干扰性能,分别取带宽ωn为80和160,对系统进行了卸载实验,其中加载曲线如图7所示。
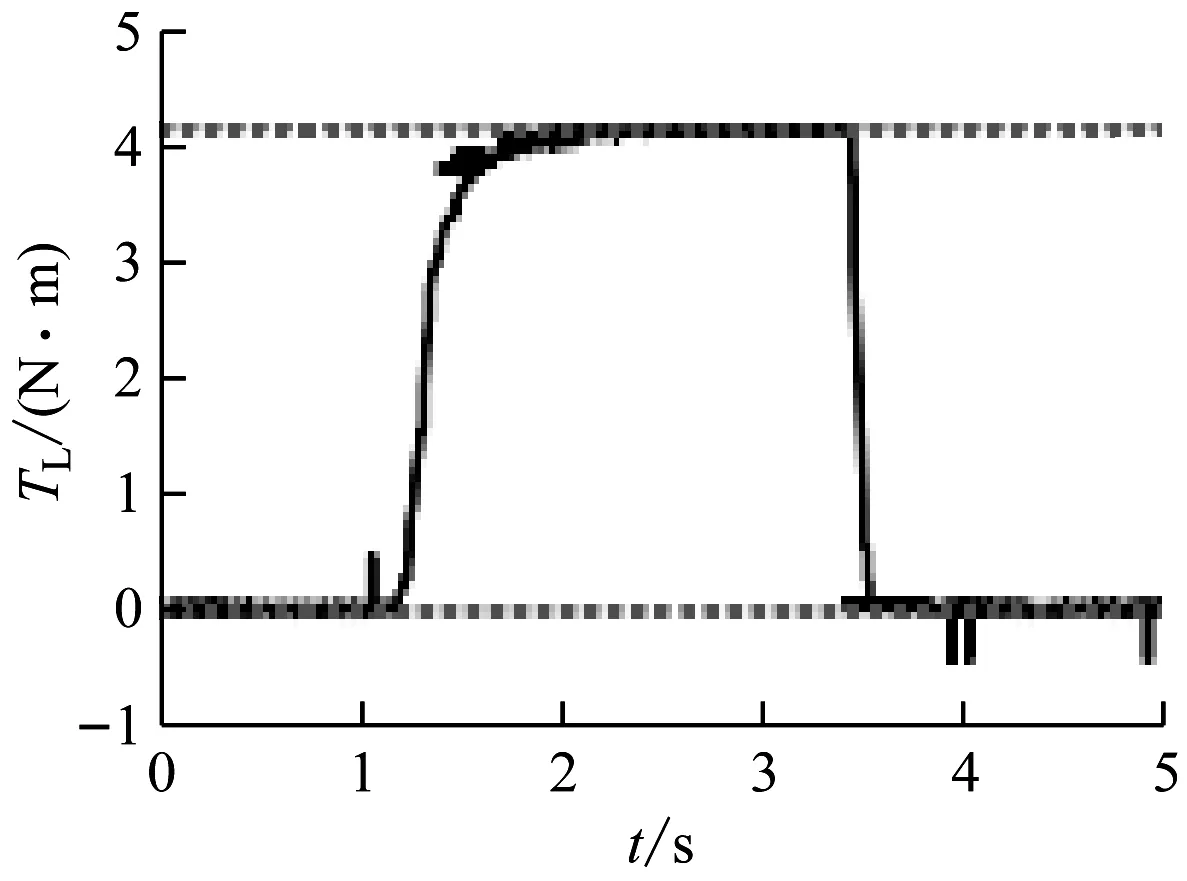
图7 实验负载曲线
响应波形如图8所示。
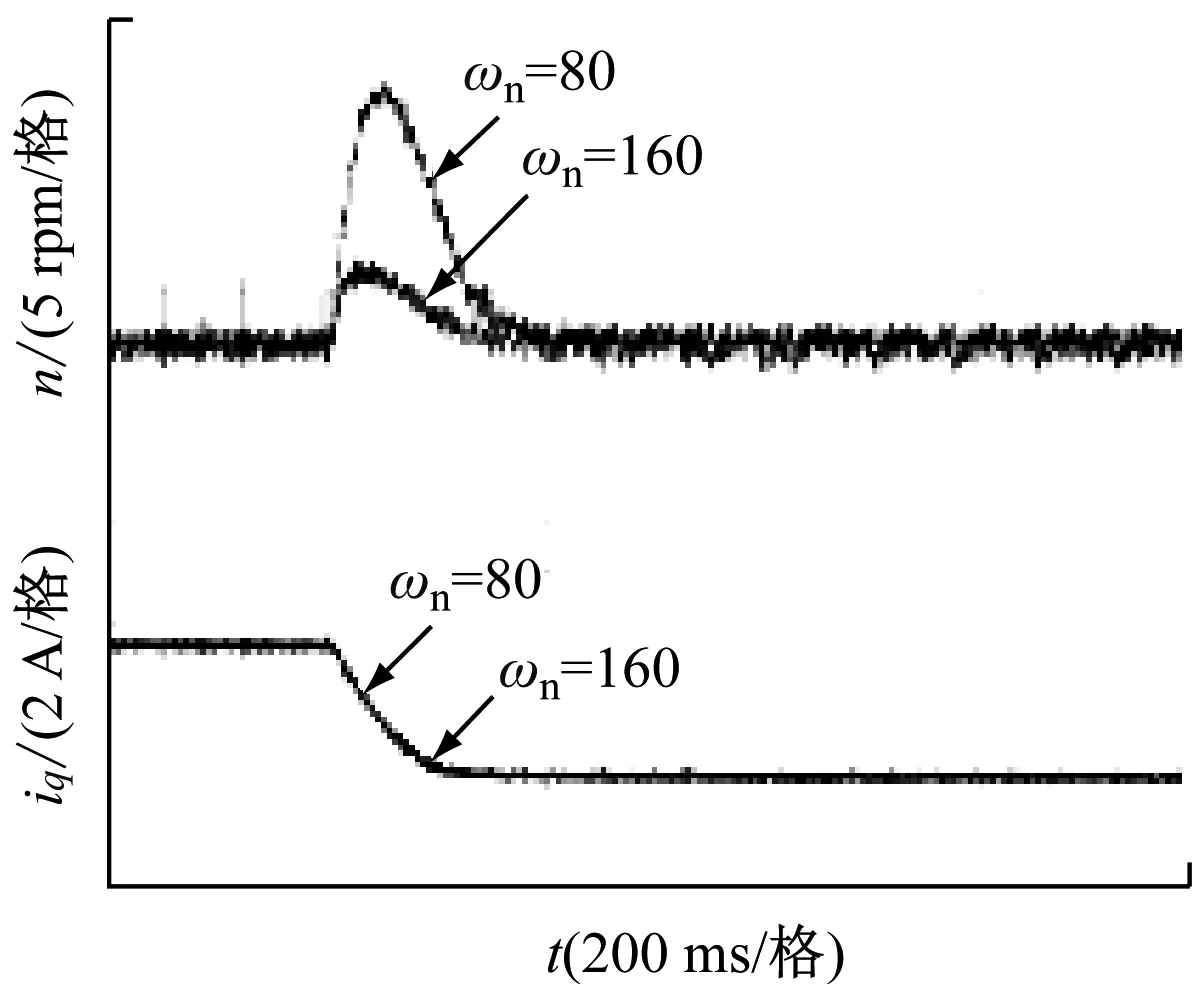
图8 不同ωn下的卸载动态响应
由图8可知,ωn取值越大,由负载引起的转速波动越小,抗干扰性能越优,但同时造成系统噪声越大[13]。
接下来验证3种不同控制系统的抗干扰性能,取ωn=80,对3种不同的控制系统按图7所示的曲线进行加载,其各自的响应波形如图9所示。
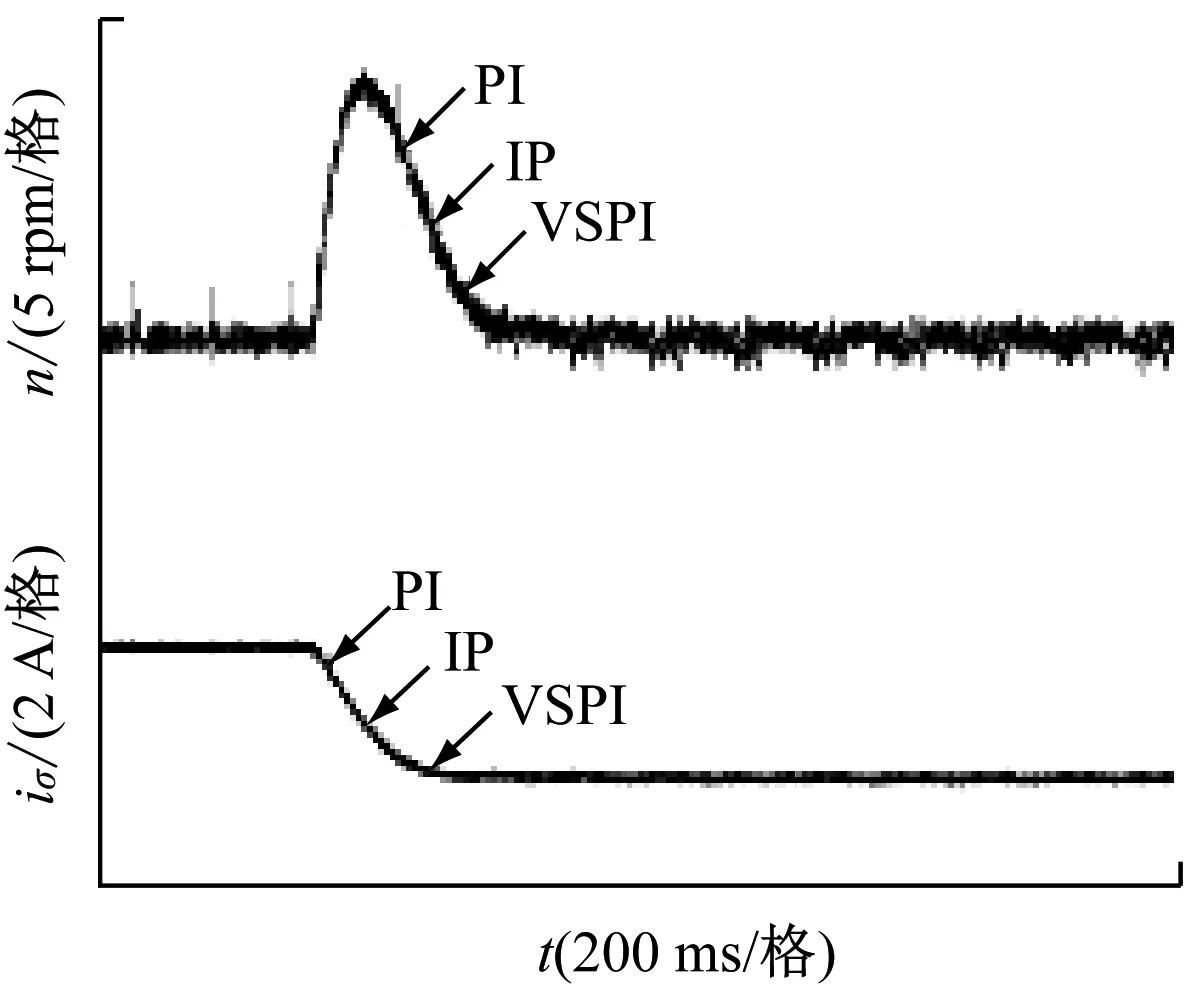
图9 相同ωn下3种控制系统的卸载动态响应
由图9可知,当带宽ωn取相同的值时,不同控制系统的动态响应曲线近乎完全重合,这说明,控制的抗干扰性能与带宽ωn的取值有关。
4 总结
为了在多种输入信号作用下,转速均能够获得最优控制的效果,本文借助传统的IP控制,设计了一种自适应变结构PI控制方式,有效化解了阶跃响应超调量与响应速度二者之间矛盾,同时极大改善了系统对连续变化输入信号的响应性能。除此之外,还能够根据不同类型的输入转速信号选取最优的调整控制规律。最后的对比仿真结果验证了本文所提出的变结构PI控制的优越性。
猜你喜欢
浙江共产党员(2022年10期)2022-11-23 05:41:30
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
航天控制(2020年5期)2020-03-29 02:10:22
中学生数理化·高一版(2019年3期)2019-04-15 00:30:36
天津教育·下(2018年9期)2018-07-13 08:25:47
浙江共产党员(2017年11期)2017-11-15 09:22:10
电子技术与软件工程(2016年19期)2016-12-19 18:21:55
祖国(2016年20期)2016-12-12 19:19:24
数字技术与应用(2015年3期)2015-06-15 14:54:17
电力自动化设备(2013年11期)2013-09-18 02:55:14
