
大型轴流转桨式水轮机导叶开度反馈装置故障分析与处理
2021-07-29 10:27赵冉
水电站机电技术 2021年7期
赵 冉
(四川省能投攀枝花水电开发有限公司,四川 攀枝花 617000)
0 引言
金沙水电站位于四川省攀枝花市西区金沙江干流中游末端的攀枝花河段上,坝址位于四川省攀枝花市西区,上距观音岩水电站坝址28.9 km,坝址距攀枝花市中心10.3 km,距银江水电站坝址21.3 km。金沙水电站工程为二等大(2)型工程,枢纽工程主要由混凝土重力坝、河床式电站厂房及泄洪消能等建筑物组成。电站装机容量560 MW,安装4台140 MW的轴流转桨式水轮发电机组,并配备4台主变压器,设计年平均发电量21.77亿kW·h。
金沙水电站调速器采用南瑞集团有限公司SAFR-2000H型微机调速器、双PCC系统。导叶主配直径200 mm,桨叶主配直径150 mm,协联方式为导叶桨叶协联,额定工作压力为6.3 MPa。导叶开度反馈装置因采用美国MTS公司E系列EP2型磁致伸缩线性位移传感器(非接触式),在1号机组试运行过程中发现因导叶反馈装置固定支架跟随接力器杠发生水平摆动位移和缸体转动,导致接触式传感器位移磁铁与传感元件(波导管)之间的感应距离发生变化,导叶开度采样信号跳变、失真,传感器采样异常报警或导致接力器频繁抽动,造成事故低油压保护动作机组“非停”发生。经过对传感器固定支架调整及滑动支架加配重块的方法进行处理,均未达到较好的效果,重新对传感器选型及支架进行优化,将磁致伸缩线性位移传感器更换为德国ASM拉绳式位移传感器,并经调试、试验合格后试运行稳定、可靠,从本质上解决了反馈信号的不稳定性,降低了因此导致的传感器采样信号异常告警及机组发生故障的风险。
机组主要技术参数:
水轮机型号:ZZ(JS)-LH-1065
额定出力: 142.9 MW
额定水头: 16.8 m
最小水头: 8 m
最大水头: 26.8 m
额定流量:938 m3/s
转轮直径: 10 650 mm
额定转速: 57.7 r/min
飞逸转速: 178 r/min
制造厂家:通用电气水电设备(中国)有限公司
发电机型号:SF140-104/16950
额定容量:160 MVA
额定电压:13 800 V
额定电流:6 693.9 A
功率因素:0.875
励磁电压:388 V
励磁电流:1 710 A
绝缘等级:F/F
推力负荷:3 600 t
制造厂家:浙江富春江水电设备有限公司
1 故障现象
2021年02月10 日20:04,运行值班人员在上位机将1号机组有功由131 MW设置为140 MW;调速器压油泵正常启动,油罐油压迅速下降;20:06,1号机组压力油罐事故低油压保护动作,监控系统启动机械事故停机程序,1号机组事故低油压机械事故停机。
2 现场检查情况
停机后,分别对机组停机流程、调速器油压装置压力油罐、回油箱油位及油压,导叶主配、桨叶主配、接力器、受油器及油管路、阀门等附件进行了全面检查,未发现漏点及异常情况。进一步对调速器油泵过滤器滤芯拆卸检查,未发现滤芯堵塞及其他异常现象。对尾水流道水质进行检查,未发现水质异常(排除转轮漏油),桨叶开、关腔油压显示正常,对4台油泵进行打压试验,打压试验正常,油泵试运行无异常情况。对调速器导叶开度反馈装置进行排查时,检查发现调速器接力器位移传感器间隙偏大,导叶传感器位置发生偏移,查看上位机故障报警信息显示,机组停机过程中频率波动较大,有油压越低限告警记录。
3 导叶动作过程及反馈装置工作原理
3.1 水轮机导叶动作过程
金沙水电站水轮机导叶接力器为摇摆式直缸接力器,主要由缸体、活塞、推拉杆、销轴、配油装置、固定支座、密封及油管等部件组成。推拉杆一端通过叉头与控制环经销轴连接,另一端与活塞螺纹连接,通过调节螺母调整接力器的行程;接力器后缸盖支座通过销轴与内顶盖装配,调节导叶开度时,缸体以后缸盖支座销轴轴线为中心水平摆动,推拉杆和活塞杆直线伸缩调节控制环位置,实现对导叶开度的调整(导水机构结构原理图详见图1)。

图1 导水机构结构原理图
3.2 反馈装置工作原理
调速器导叶开度反馈装置主要由三组磁致伸缩线性位移传感器(包括感应元件波导管、移动磁铁)、固定支架、滑动支架组成。传感器的核心由一根铁磁材料的感应元件(亦称作“波导管”)和一个可移动的永磁铁组成,波导管支架通过抱箍固定于接力器缸体,移动磁铁支架组成通过抱箍固定于活塞杆端部。机组调整负荷时,通过接力器活塞与缸体的相对位移(活塞杆的伸缩)改变导叶开度,同时磁铁与感应元件同步发生相对位移。永磁铁在波导管上会产生一个纵向的磁场。每当电流脉冲由传感器电子头送出来并通过波导管时,会沿波导管产生一个径向磁场。在传感器内部,波导管在两个磁场相互作用的瞬间产生扭变脉冲。这两个磁场相互作用产生的应变脉冲能够被传感器的电子头检测出来。其中一个磁场由沿着带有波导管的传感器杆移动的磁铁产生,另一个磁场由波导管上通入的电流脉冲产生。位移磁铁的位置可通过计算产生电流脉冲与应变脉冲到达传感器电子外壳这段时间,从而进行准确的测量。通过上述基本原理,实现高重复性和高准确性的可靠位移测量。当这两个磁场在波导管相互作用的瞬间,波导管产生“磁致伸缩”现像,一个应变脉冲即时产生。这个被称为“返回信号” 的脉冲以超声波的速度从发生点(即位置测量点)返回传感器电子头,并被应变脉冲转换器检测出来,导叶开度位置信号反馈给调速器,实现对接力器活塞与缸体的相对位置的精确控制,从而实现对导叶开度的精确控制(磁致伸缩位移传感器原理图见图2)。
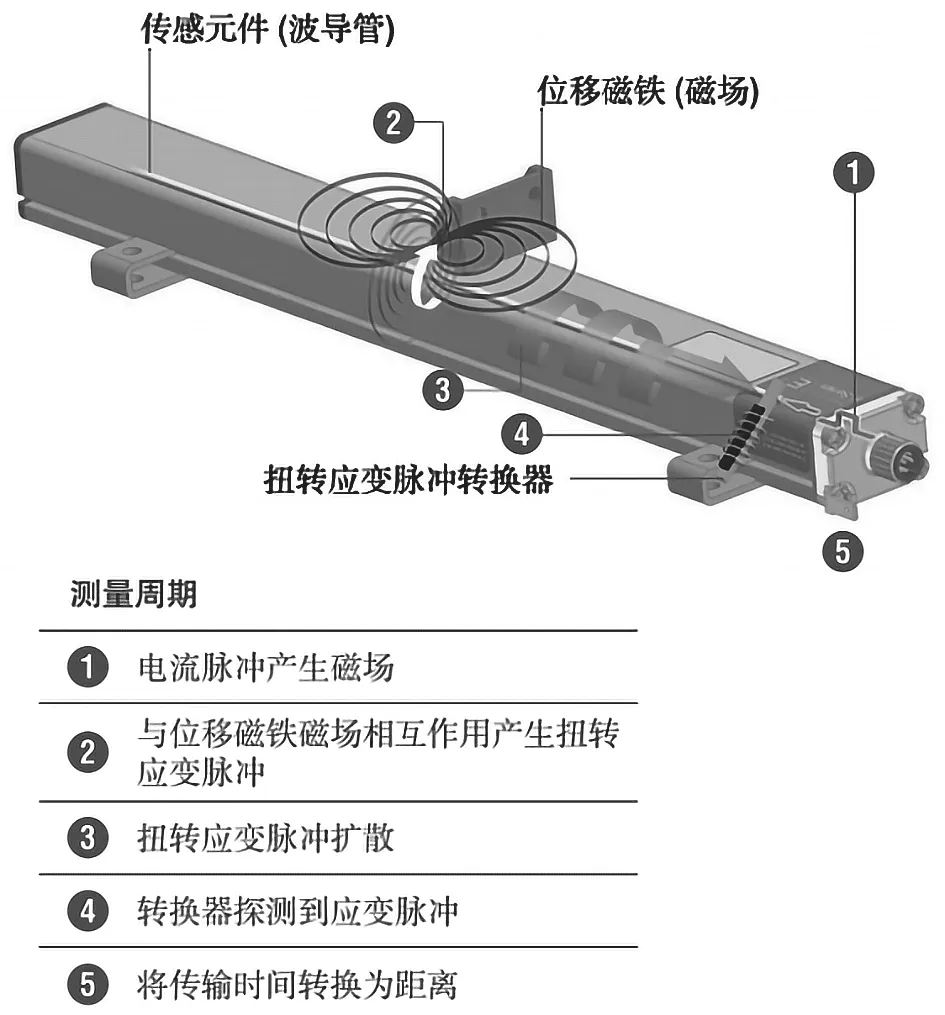
图2 磁致伸缩位移传感器原理图
4 原因分析
因金沙水电站水轮机结构特殊性,主要体现在接力器为摇摆式直缸接力器,同时因接力器缸体与内顶盖为球形结构连接形式(接力器与内顶盖连接结构原理图见图3),导叶接力器调整导叶开度时,活塞和缸体的运动是一种复合运动:缸体带动活塞以缸体后缸盖支座销轴轴线为中心的水平摆动、缸体以球面轴承中心点为中心在竖直面的转动也造成活塞与缸体同步旋转。接力器缸体的摆动和位移必然会带动支架发生水平位移和转动,造成感应元件与磁铁之间间隙变大,甚至脱离感应区,导致导叶采样反馈信号跳变、失真,调速器控制逻辑为“三选二”方式,当调速系统两路开度反馈信号失真或跳变时,调速系统便会给定导叶开度频繁调整机组负荷,同时桨叶动作持续调整寻找最佳协联点,接力器大范围抽动引起耗油量瞬时迅速增加,压油罐压力急剧下降,造成调速器油压装置全部油泵陆续启动,仍不能满足调速器系统供油需要。此时,事故低油压保护动作,监控系统启动机组事故停机流程,机组停机(导叶反馈装置见图4)。
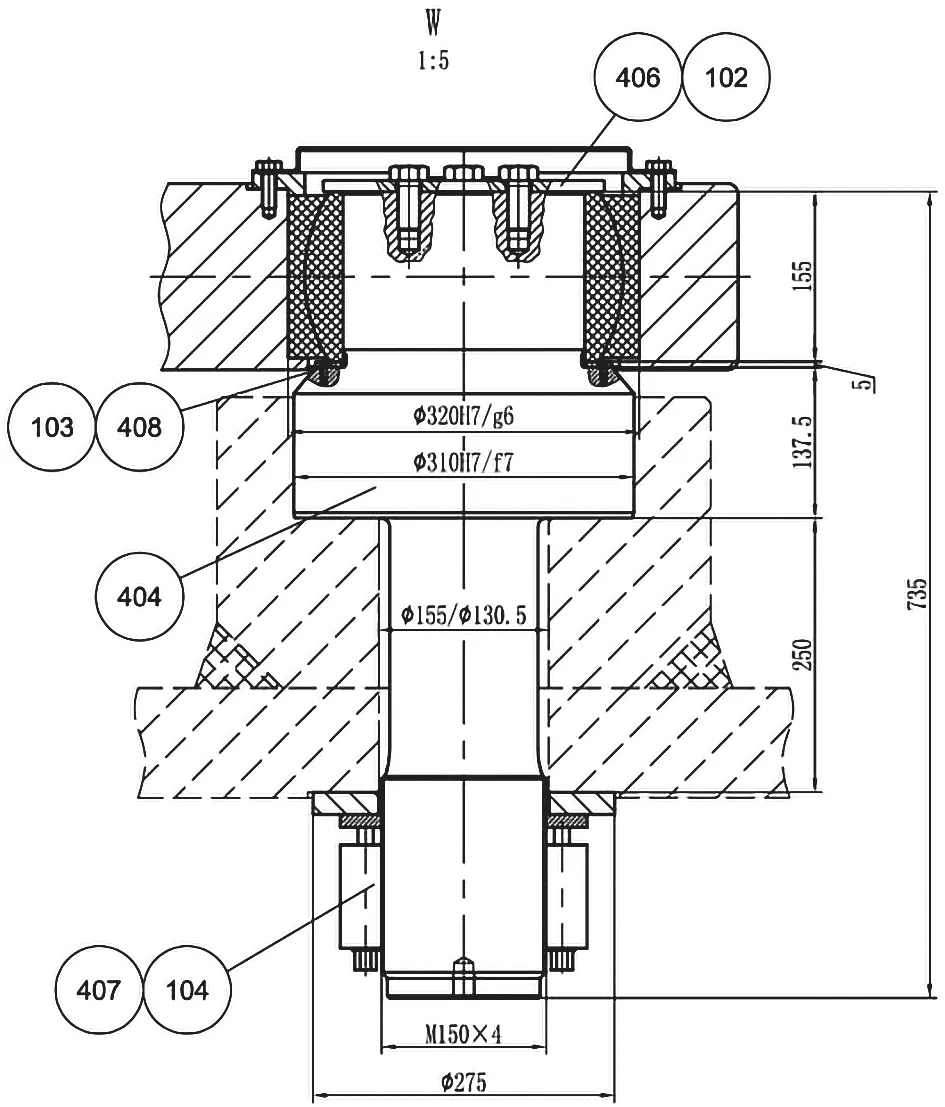
图3 接力器与内顶盖连接结构原理图

图4 导叶反馈装置图片
5 处理过程
5.1 临时处理
在现场采取对传感器滑动支架进行加配重块及调整固定支架水平的方法进行处理后,虽能恢复机组暂时运行,但随着机组运行过程中传感器直接随接力器动作发生位移和摆动后,导致传感器感应元件(位移磁铁)与传感元件(波导管)的感应距离发生变化(正常感应距离为3~5 mm),且感应磁铁偏离波导管中心线,甚至超过感应距离无法感应,且运行人员在增、减负荷时必须随时观察传感器是否发生偏移,大大增加了运行人员的工作强度,且不能满足机组长期稳定运行的要求(导叶反馈装置滑动支架临时加配重块处理图片详见图5)。
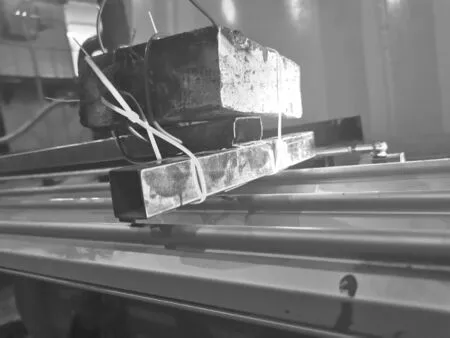
图5 导叶反馈装置滑动支架临时加配重块处理
5.2 改造处理
在传感器滑动支架增加配重块仍未取得明显效果后,决定将原磁致伸缩线性位移传感器(非接触式)更换为拉绳式位移传感器,传感器采用CLMB1系列位移传感器,模拟量或同步串行输出,量程范围为:0~1 500 mm至 0~15 000 mm,模拟量输出为:0~10 V,4~20 mA双信号输出,拉绳式传感器固定于接力器活塞杆上安装的移动支架上,拉绳通过挂钩悬挂在固定在接力器缸体上的滑动支架上,在机组正常运行时,接力器活塞杆在开、关腔油压作用下做往复直线运行,通过活塞杆移动带动拉绳的伸缩输出导叶开度反馈信号,拉绳式位移传感器采取与磁致伸缩线性位移传感器安装思路。同时,对固定支架进行优化设计,增加其稳固性,使其更适用于拉绳式传感器运行可靠性的要求。但也存在支架偏转的问题,该偏转会造成传感器拉伸量的微小变化,但该变化量在测量精度要求的范围内,不会造成位置信号丢失,不会引起机组故障停机,避免了因接力器杠体位移及转动导致的反馈信号跳变及失真现象,提高了调速器导叶开度反馈装置运行的稳定性和可靠性,使机组运行更加稳定、可靠(导叶反馈装置改造后结构示意图见图6)。
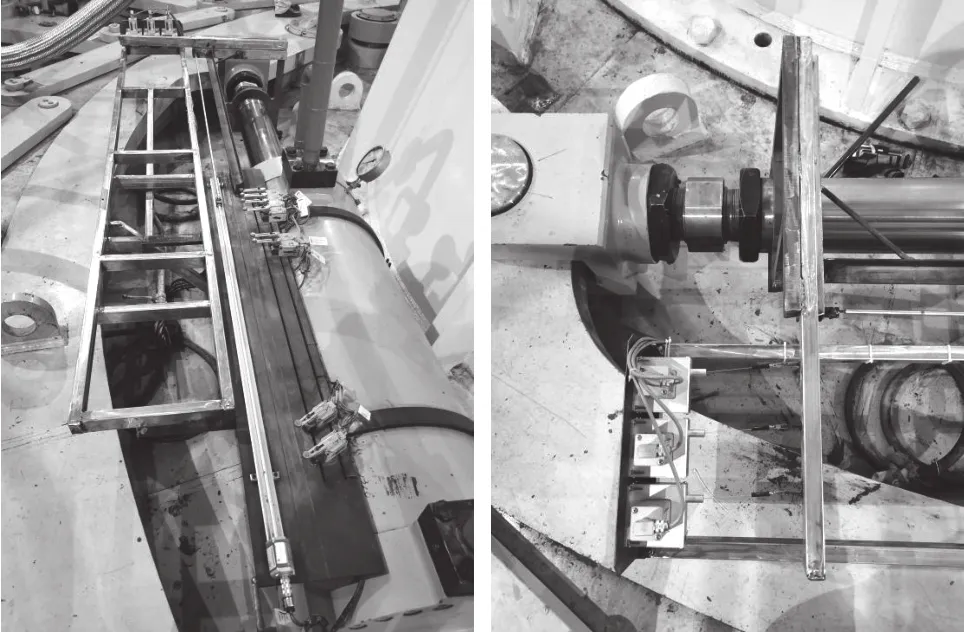
图6 导叶反馈装置改造后结构示意图
5.3 测试与试验
目的:检查闭环控制中输出电压与电液伺服阀配合是否适当;确定导叶副环控制的比例、积分死区、稳零输出等参数。
试验准备工作:对电调柜、机柜、油压装置柜进行检查上电;油压装置建压到额定压力6.3 MPa;调试机柜与传感器的配合性,重新调试综合模块,使之可以手动开关操作,正确显示导叶开度;手动开关接力器进行管路充油,检查有无漏油现象并处理;调试电柜与机柜的配合,使之可以自动开关操作。
试验项目:进行导叶副环实验。
方法:选择设置窗,输入试验密码,选择A套和B套调试,进入导叶负环扰动界面,设置导叶负环KP,积分死区参数。进行阶跃扰动,最后记录试验波形。
调试技巧:在无水试验中进入导叶扰动试验,导叶切手动,根据经验预设PI参数,然后设置导叶给定,观察导叶动作情况,若不动作或反向动作,在电柜端子调整控制输出正负(控制输出正负是否正确,可以在定位试验窗强制全开全关,看接力器方向是否相同,若相反,调换正负即可)。导叶扰动,根据录波观察导叶动作是否平滑,是否到位。根据经验,比例不要超过8,积分根据实际选择。如果给定和反馈始终有偏差,可修正一下主配零点,微调一下主配反馈增益(W4),使之反馈变小,灵敏。扰动结束后,自动维持一个开度,要触摸主配阀芯是否有抽动,副环扰动给定和反馈偏差相差0.2%以内后,主配阀芯抽动应降到最小。副环扰动的时候,注意电柜、机柜间导叶开度显示的差异不要太大。
试验结果:导叶闭环控制稳定,功放和电液伺服阀匹配良好(1号机运行稳定后调速器电控柜信息窗见图7)。
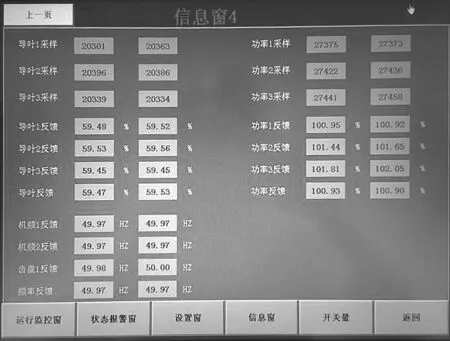
图7 1号机运行稳定后调速器电控柜信息窗
6 结束语
针对金沙水电站1号机组调速器导叶开度反馈装置传感器选型不合理造成导叶采样信号失真、跳变引起机组事故底油压导致机组事故停机的情况,通过现场改造、试验结果及试运行情况来看,将导叶开度反馈装置3支磁致伸缩线性位移传感器现场改造为拉绳式位移传感器、并对传感器支架进行优化设计,能满足机组安全稳定运行的要求。目前已完成金沙水力发电厂1号、2号机组的导叶反馈装置改造工作,且试运行效果良好,机组运行稳定性大大提高,也避免因“非停”事故造成电网的考核,间接增加了发电效益。证明以上分析和处理是正确的,由此也可以看出在水电站设备中因自动化元件设计及选型不合理导致的故障也应该引起重视,尤其是涉及到参与机组控制系统采样的自动化元件必须可靠、稳定运行,每个电站的情况都不尽相同,应结合实际情况全面考虑,确保机组安全、稳定运行。
猜你喜欢
铸造设备与工艺(2021年5期)2021-12-29
黑龙江科学(2021年10期)2021-01-13
水电与新能源(2020年12期)2021-01-07
水电站机电技术(2020年8期)2020-08-28
铸造设备与工艺(2020年3期)2020-08-01
装备制造技术(2019年12期)2019-12-25
模具制造(2019年4期)2019-06-24
数码设计(2018年2期)2018-12-26
消费导刊(2017年24期)2018-01-31
科技创新与品牌(2017年9期)2017-10-20
