自走式辣椒收获机械研制与试验
2021-07-29 02:53苏安晋
农业工程 2021年6期
苏安晋,杜 婵,杜 娟
(1.山西省农业机械发展中心,山西 太原 030031;2.太原科技大学,山西 太原 030031)
0 引言
辣椒是茄果类重要蔬菜之一,是世界上仅次于豆类、番茄的第3大蔬菜作物[1]。我国是世界上最大的辣椒生产国和主要的辣椒消费国及出口国,种植面积占世界辣椒种植面积的40%左右,形成以贵州、湖南、新疆、陕西和山西等为代表的辣椒生产大省(自治区)。2013年,我国辣椒产量约1 750万t,2020年更是达到1 900万t。目前,全国辣椒种植面积占蔬菜种植总面积的20%左右,约233.3万hm2(3 500万亩),年产值约2 800亿元。
近年来,山西省辣椒种植面积逐年加大,辣椒已成为山西省种植面积最大的蔬菜种类之一,2020年辣椒种植面积超过5.67万hm2(85万亩),占全省蔬菜播种面积的17%左右[2]。由于独特的地理位置和气候,造就了山西省辣椒具有产量高、品质好和色价高等特点。但是辣椒普遍采用人工采摘,采摘成本占辣椒售价的38%~40%,采摘时间紧、劳动强度较大、采摘环境恶劣和采摘效率低等,严重制约了山西省辣椒产业的健康发展[3]。辣椒采摘技术是亟待解决的问题,而自走式辣椒收获机械技术及装备是辣椒收获的有效方法之一[4]。
1 国内外辣椒收获机械研究现状
国外对辣椒收获机械研究较早,美国于1967年率先在铃状辣椒商业机械化采摘收获方面进行了研究,这一时期,世界其他国家和地区也设计出多种辣椒收获机械,但是采摘效果都不理想[5]。20世纪70年代,展开式双螺旋型辣椒收获机在美国诞生;80年代初,辣椒收获机械在美国多家研究机构得到进一步研究,但是商业化效益不显著。90年代以后,随着人工采摘收获成本的不断增加,以及辣椒产业的快速发展,各国又着手对辣椒收获机械的研究,以西班牙和美国为例,他们在这方面投入巨大。西班牙在双螺旋式辣椒收获机械方面做了大量工作,美国对原有的番茄收获机进行改装,商用红辣椒收获机就是在此基础上设计生产的,取得较好的收获效果。之后又对各类辣椒采摘装置和清选装置进行研制,采摘装置主要有长杆梳指式、带状梳齿式及滚筒弹指式3种形式。清选装置主要有气流式与辊子式的复合形式,以及气流式与滚筒式的复合形式两种。
国内对辣椒收获机械的研究相对较晚,基本处于人工采收或半机械化采收阶段[6]。据统计,2000年之前只有为数不多的农民自己改制简易的辣椒采收机,几乎没有专业的研究机构进行研究,产品也大多不适合大面积种植规模作业,基本是在人工收割或机器收割完成后,再由人工喂料进行采摘,结构简单,产品单一,破碎率比较高,拾禾率比较低。
随着辣椒种植面积的持续增大和劳动力紧缺,辣椒采摘成本在辣椒生产成本中所占比例越来越高,辣椒种植户和加工企业对辣椒机械化收获的需求迫切,一些科研单位和生产企业相继对辣椒收获机的关键部件进行了研制和开发。如新疆生产建设兵团农2师21团对线辣椒采摘装置进行了研制;新疆机械研究院研发出自走式不对行辣椒收获机;新疆石河子大学申请了多项有关辣椒收获机的专利,在此基础上开发出一种新型辣椒联合收获机,一次完成辣椒采摘、分离、清选和装箱。
目前,人工采摘依然是山西省辣椒收获的主要方式,虽然引进一些收获机械,但破碎率高、拾椒率低,效果都不太理想[7]。山西省相关单位,根据当地辣椒种植农艺,研发出一种适合山西省的自走式辣椒收获机械,填补了山西省辣椒收获技术的空白。
2 山西省自走式辣椒收获机性能与试验
2.1 结构组成
该自走式辣椒收获机由底盘、变速装置、收获平台、升运装置、清选风机、集料器和传动系统等主要部件组成[8-9]。其结构如图1所示。
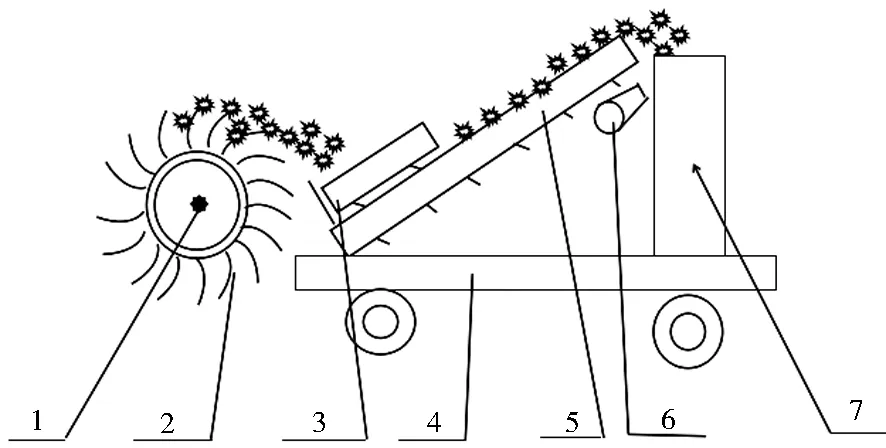
1.主启动机 2.采摘部件 3.传动系统 4.底盘 5.升运装置 6.清选风机 7.集装器
2.1.1 底盘
底盘用于固定、支承收获机的收获平台、升运装置、清选风机、集料器和传动系统等主要部件。
2.1.2 收获平台
当自走式辣椒收获机械向前行进采收辣椒时,其扶禾装置(扶禾板和扶禾器)将辣椒茎秆导入采摘装置中,辣椒由采摘装置脱落,由升运装置输送至割台搅龙中,割台搅龙将辣椒由两端向中间推送,抛送到升运装置,进入集料器。
(1)扶禾辊轮(扶禾板)。随着自走式辣椒收获机械向前行进,扶禾辊轮持续把辣椒植株向前推送,使辣椒植株向前倾斜一定的角度,有利于辣椒植株稳定地进入采摘装置,扶禾辊轮在采摘过程中应保持转动自如,扶禾辊轮高度可以根据辣椒植株高度调整割台两侧螺栓来实现,扶禾板的高度可以通过调整链条来实现。
(2)升运器下辊轮。调整两侧的螺栓来调整升运带的松紧,过松时容易打滑,过紧容易损坏。调整时应注意保持两侧松紧程度一致,否则升运带会跑偏。应经常检查该辊轮表面,清理杂物,否则会缩短升运带寿命。
(3)采摘部件。采用旋转式采摘装置,将辣椒从辣椒茎秆上脱落,辣椒植株被导入采摘装置后,随着滚筒的转动,固定在其上面的弹齿将辣椒脱落。应经常校准弹齿的角度,在使用过程中应检查杂物的缠绕。
(4)采摘台搅龙。采摘台搅龙把摘落的辣椒由两端向中间位置推送,再把辣椒运送到升运装置[10]。
2.1.3 升运装置和集料箱
采摘后的辣椒通过升运装置运送到集料箱,当集料箱的辣椒达到一定质量时,通过重力传感器传到控制系统,进行自动卸料。
2.1.4 变速箱
改变传动比,来达到辣椒收获机械需要的速度,还可以中断动力输送,实现空挡。
2.1.5 风机
通过风机吹出采摘过程中携带的大部分碎小茎叶,对采摘的辣椒进行清选。
2.1.6 主要技术和经济指标
该自走式辣椒收获机作业效率0.30~1.05 hm2/h,作业速度3.5~7 km/h,摘净率>95%,破损率<7%。
2.2 工作原理
启动辣椒收获机,在动力系统带动下,辣椒收获机沿辣椒行间前进,扶禾板和扶禾辊轮将辣椒植株持续向前推,辣椒植株持续稳定进入采摘装置。采摘零部件主要是滚筒和弹齿,滚筒上固定着弹齿,弹齿是采摘核心零件,通过顺时针转动滚筒,运动到前端的弹齿将辣椒植株上的辣椒和细小枝叶摘落,在滚筒的旋转过程中,弹齿带动摘下的辣椒和枝叶向后运动,最终被甩到输送带上,采摘台搅龙把摘落的辣椒由两端向中间位置推送,再把辣椒运送到升运装置,在风机的作用下对辣椒果实进行吹风清选,碎小枝叶则掉落到地面,辣椒通过升运装置运送到集料箱,当集料箱的辣椒达到一定质量时进行自动卸料,完成辣椒果实的采摘。
2.3 创新点
采摘部件由滚筒及弹齿构成,辣椒植株被导入采摘装置后随着滚筒转动,固定在滚筒上面的弹齿把辣椒脱落,减小辣椒破损率。作业时,扶禾辊轮持续把辣椒植株向前推送,使辣椒植株向前倾斜一定角度,有利于辣椒植株进入采摘装置更稳定,提高辣椒果实采摘过程中的拾禾率。集料箱装有压力传感器,防止集料箱超重损坏机器。
2.4 田间试验
2020年在晋中市对该机具进行了多次田间试验。晋中市属于山地丘陵平原地貌,地理环境比较复杂,累计收获辣椒33.3 hm2(500多亩),作业效果得到当地用户的认可。田间试验数据如表1所示。
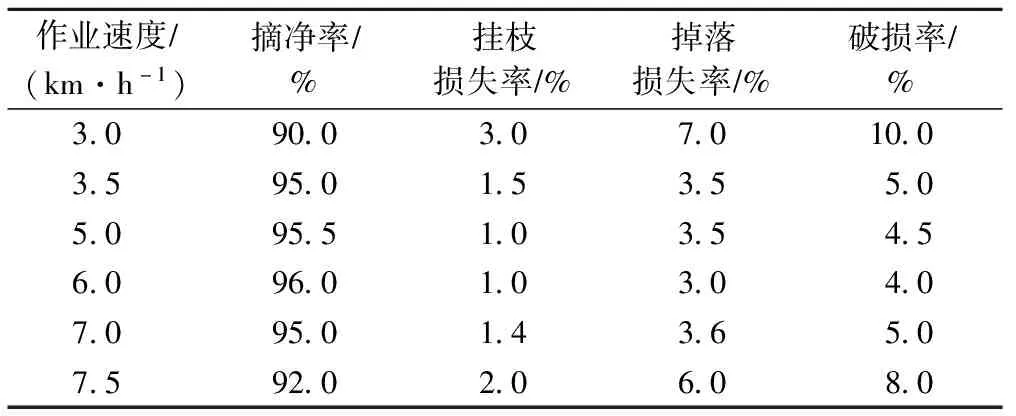
表1 自走式辣椒收获机田间试验数据
田间试验表明,该自走式辣椒收获机性能稳定、效率高、摘净率高、挂枝率低、掉损率低,操作简单、省时省力,可将广大辣椒种植户从传统的手工采摘方式中解放出来,具有较好的经济效益和社会效益。
3 结束语
辣椒机械化收获是促进辣椒产业健康快速发展的重要因素。自走式辣椒收获机械技术及装备可以将农户从繁重的辣椒采摘劳动中解放出来,作业效率高、破损率低、采净率高、操作方便。山西省相关单位,根据当地辣椒种植农艺,研发出的适合山西省的自走式辣椒收获机械,经田间试验表明,其作业性能稳定、效率高、摘净率高,各项指标满足设计要求,填补了山西省辣椒收获技术及装备空白。
猜你喜欢
幼儿教育(2022年10期)2022-10-28
农机使用与维修(2022年2期)2022-02-21
农机使用与维修(2021年7期)2021-11-29
今日农业(2021年8期)2021-11-28
农机使用与维修(2021年12期)2021-11-27
幼儿教育·父母孩子版(2021年6期)2021-08-05
农民致富之友(2019年33期)2019-12-20
幼儿教育·教育教学版(2019年9期)2019-02-02
船海工程(2018年1期)2018-03-01
湖北农业科学(2016年20期)2017-02-15