
基于ULS、TLS和超声测高仪的天然次生林中不同林冠层树高估测
2021-07-28 04:07赵颖慧杨海城
南京林业大学学报(自然科学版) 2021年4期
赵颖慧,杨海城,甄 贞*
(1.东北林业大学林学院,黑龙江 哈尔滨 150040;2.东北林业大学森林生态系统可持续经营教育部重点实验室,黑龙江 哈尔滨 150040)
树高是森林资源调查中的重要因子之一,与胸径(DBH)和树种等其他因子共同被广泛用于估测无法以无损方式获得的生物量等重要森林参数。在生物量模型构建中加入树高因子作为预测参数,可以显著地提高生物量模型的估计精度[1-2],因此,树高因子测定的准确性至关重要。目前,树高的实测方法通常是应用测高仪进行实地测量,不仅费时费力,还受林况、测量者的经验及所使用的设备等多种因素影响[3]。
激光雷达(light detection and ranging, LiDAR)是一种主动遥感技术,其发射的激光脉冲在森林中具有很好的穿透性,高采样密度LiDAR能够获取单木三维结构特征,因此被广泛用于林业研究[4]。无人机激光雷达数据(unmanned aerial vehicle laser scanning, ULS)是近年来新兴的遥感数据,与机载激光雷达数据(airborne laser scanning, ALS)相比,具有更低的成本和更高的点云密度[5],在森林冠层结构估测中具有明显的优势[6-7]。地基激光雷达(terrestrial laser scanning,TLS)生成的3D点云,能够获得高质量的林下LiDAR影像,可准确地描述林下信息,用于精确提取林下结构[8-10]。有学者使用TLS提取树高并进行分析,认为TLS提取的树高会低于实际值[11-13]。也有学者认为使用ALS提取的树高,也会受点密度和森林结构等影响而造成低估[14-15]。另外,Sibona等[16]测量了100株砍伐木树高,并对砍伐木树高与野外调查中使用测距仪获得的树高和使用ALS提取的树高进行了比较,结果显示ALS提取的树高更接近真实值。Wang等[17]比较了ULS和TLS提取的树高,结果表明ULS在树高的估测方面优于TLS。Wallace等[18]直接使用ULS点云生成冠层高度模型(canopy height model, CHM),使用标记控制分水岭算法单木分割提取树高,结果表明树高被低估了0.11 m。由此可见,基于单一数据源(ALS、ULS和TLS)提取树高都有一定的局限性。
有学者将林分按照一定的树木高度为分割点,分别采用不同数据源进行估测。例如,Wang等[19]分别用TLS和ALS提取的树高与样地实测树高对比,结果表明:当树高小于15 m时,TLS提取的树高与样地实测树高更接近;当树高大于15 m时,使用ALS提取的树高更准确,但该树高分割点(15 m)的选取比较主观,仅适合应用于芬兰北部的松树和桦树混交林。另外,也有研究者认为树高测量的误差主要来自林冠层的遮蔽[20]。林冠层垂直结构信息丰富,体现了森林植被在垂直方向上的层次性和空间配置方式,影响着树木生长和下层植被分布[21-23]。胡文杰等[24]根据样地调查数据,采用树冠光竞争高度法将林分划分为上林层、中林层和下林层。胡传伟等[25]通过森林群落学调查的方法获取数据,应用聚类分析和生态位分析相结合的方法,研究了天然次生林的树种组成与垂直结构。对于激光雷达在林冠分层上的应用,也有学者进行了研究[26-30]。有研究将冠层高度分布(camopy height distribution, CHD)用于对林分的冠层划分,Maltamo等[31]使用改进的直方图阈值法对CHD直方图进行计算,实现了对冠层的分层。
综上所述,以ALS、ULS和TLS单一数据源提取树高的研究已十分常见,但大多数只是针对某一林分直接提取树高,而对林分以CHD进行分层,并根据不同冠层结合不同数据源提取树高的对比研究较少。因此,本研究以ULS、TLS和野外样地调查实测树高为数据源,以东北林业大学帽儿山实验林场中林施业区50 m×50 m(0.25 hm2)样地为研究对象,基于CHD对林冠层进行分层,针对不同树木类型(针叶树和阔叶树)和不同林冠层(上层和下层)的单木进行树高估测,分析在不同林冠层中应用不同数据源探测提取树高的异同,探索适用于中国北方天然次生林树高估测的方法,为更准确地估测天然次生林树高提供依据。
1 材料与方法
1.1 研究区概况
研究区为东北林业大学帽儿山实验林场中林施业区50 m×50 m(0.25 hm2)方形样地(127°34′15″E,45°21′29″N)。林场位于黑龙江省尚志市西北部,地处张广才岭西坡,属于大陆性季风气候,植被是典型的东北天然次生林,原始地带性顶级群落为红松阔叶林。由于森林屡遭破坏,原始植被发生了逆向演替,形成了目前以珍贵阔叶林、杨桦林、柞木林等为主的天然次生林与红松(Pinuskoraiensis)、落叶松(Larixgmelinii)、樟子松(Pinussylvestrisvar.mongolica)等人工林镶嵌分布的森林景观。
1.2 研究数据获取
1.2.1 ULS数据
数据获取时间为2019年7月,使用飞马D200旋翼平台的一体化高精度航测无人机系统,配备高精度LiDAR模块(D-lidar200)。LiDAR传感器(RIEGL mini VUX-1UAV)波长为905 nm,最大回波数为5,最大传感器频率为100 Hz,点云密度为104点/m2。
1.2.2 TLS数据
数据获取时间为2019年10月,由麦格天泓公司开发的Trimble TX6高速三维激光扫描仪获得,在样地(50 m × 50 m)内采用蛇形方式布设多个测点,原则上确保每一株树都能360°接收到激光扫描仪扫描。高速三维激光扫描仪角度精度80 μrad,扫描速度50万点/s,最小测程0.6 m,最大测程80 m,测量误差±2 mm。
1.2.3 野外调查样地数据
2018年7月在帽儿山林场中林施业区内选择包含多个优势树种的50 m×50 m方形样地,郁闭度为0.8,并于2019年7月复测。使用RTK(real time kinematic)记录样地中所有树木冠顶(树冠最高点)在地面上的投影坐标位置(误差小于0.1 m)。以5 cm为起测径阶进行每木检尺,记录包括:胸径、树高、冠幅和树种等因子。使用瑞典Hagolf公司生产的Vertex IV超声测高仪获取树高。样地中共记录359株样木,其中针叶树144株,主要为红松;阔叶树215株,主要为榆树(Ulmuspumila)、胡桃楸(Juglansmandshurica)、杨树(PopulusL.)、水曲柳(Fraxinusmandshurica)和白桦(Betulaplatyphylla)等。样地中不同树木类型(针叶树和阔叶树)的胸径、树高和冠幅的统计特征见表1。

表1 样地树木统计特征
1.3 研究方法
1.3.1 数据预处理
ULS点云数据预处理包括:去噪、分离地面点和点云归一化处理。首先对原始的点云数据去噪,之后采用渐进加密三角网算法进行滤波[32],获得地面点和非地面点。最后,使用地面点生成的数字高程模型(DEM)对点云进行归一化处理,得到点云的高程值,若该点为树顶,则其高程值可视为树高。
TLS点云数据预处理包括:去除“飞点”、抽稀、分离地面点和归一化处理。首先去除“飞点”,即噪点;其次,对点云数据采用八叉树方法[33]进行“抽稀”,通过多次抽稀研究发现,采用13级八叉树抽稀后获得的数据运算量小又极大地保持了数据真实性;最后,采用渐进加密三角网算法对点云进行地面点滤波,然后做归一化处理。
1.3.2 基于CHD的林冠分层

1.3.3 单木树高的提取
本研究目的是探讨不同林冠层中应用不同数据源提取树高的异同,为排除单木树冠提取算法对结果的影响,本研究对ULS和TLS数据进行人工目视解译,分离出单株树并手动量取树高[19]。当使用ULS提取树高时,有树高交叉重叠现象:①如果交叉重叠不严重,本研究结合样地调查的单木位置,直接提取树高,计算误差。②如果交叉重叠严重,顶层的点云数据是根据点云位置的最高点与实测树高的位置匹配,提取树高;下层的点云则根据单木冠型来判断其树顶点提取树高,如果冠型难以识别,则记为识别失败。
1.3.4 树高离群值的剔除和比较评价
在对ULS和TLS数据探测提取的树高与实测树高进行比较之前,首先要剔除离群值。离群值表明如果3种数据源(ULS、TLS及ULS和TLS的交集)提取的树高之间存在明显差异,则存在测量错误,因此进行比较评价之前要对离群值进行分析[19]。由于树高交叉重叠现象,在单木树高提取中被错误识别的树高也会因判定为离群值而被剔除。离群值的判断方法如下:
(1)
(2)

剔除离群值后,将林冠层分上、下层,分别将ULS和TLS探测提取的单木树高与样地实测的单木树高进行比较,评价指标包括均方根误差[RMSE,式中记为σ(RMSE)],相对均方根误差[rRMSE,式中记为σ(rRMSE)]、偏离率[Bias,式中记为σ(Bias)]和相对偏离率[rBias,式中记为σ(rBias)][36],计算公式分别为:
(3)
(4)
(5)
(6)

2 结果与分析
2.1 基于CHD曲线的林冠分层
对ULS点云切片后,以点云百分比为横坐标,点云高度为纵坐标,绘制CHD曲线如图1A所示。由Lloyd算法计算出的林冠上、下层之间的高度阈值为8.5 m。在CHD中,冠层的相对分布密度被描述为高度的函数[37]。结合由图1B中的点云侧视图可以看出,在高度为0 m的位置存在少量点云,该区域可视为地面部分。在8 m以下的高度,点云百分比始终维持在较低的范围,主要由于样地中虽然存在大量低矮树木,但也受到冠层的遮蔽,难以接收到ULS的扫描。随着高度的增加,点云百分比逐渐增加,当高度到达8.5 m时,点云数量急剧增大,说明此时树木冠层更加密集,能接收到的点云数量增加。在9~12 m处为点云百分比较大的位置,结合ULS的扫描特点,可以认为大部分树木的枝叶部分都集中在这个高度上,所以能够获得大量的点云回波,相应地也会对该高度以下的位置有较强的遮蔽作用,在12 m以上,点云百分比逐渐减小,可以认为随着冠层高度增加树木逐渐稀疏,很少受到遮挡或不受其他树木遮挡。

图1 CHD曲线(A)和点云视图(B)
2.2 离群值的剔除
按公式(1)、(2)对ULS和TLS探测提取的树高离群值进行了剔除和比较,结果如表2所示。

表2 3种数据源的离群值统计
基于ULS数据的离群值共有30个,其中林冠上层有20个,林冠下层有10个。从树木类型来看,产生离群值的有19株阔叶树、11株针叶树。
基于TLS数据的离群值共有11个,主要出现在林冠上层,在林冠下层仅有2株单木被判定为离群值。从树木类型来看,产生离群值的主要是阔叶树,针叶树的离群值共有2个。与实测数据对比发现,在11个离群值中,有6个离群值出现在9~14 m的高度上,由图1的CHD曲线图可以发现,在这个高度上是点云百分比较大的位置,林冠层枝叶密集,容易产生误判。此外,TLS数据对2株单木的树高产生了高估,这2株单木都是阔叶树,高度位于9~12 m的枝叶密度较大的林冠层中。
ULS数据与TLS数据产生的离群值交集共有3个,都是9~11 m林冠层的阔叶树。
2.3 基于不同数据源的树高比较
2.3.1 基于ULS的估测树高与实测树高比较
去掉ULS数据探测提取树高的离群值后,共有245株单木,其中林冠上、下层分别有单木230、15株,与样地实测树高比较结果见表3。在ULS探测的单木中,林冠下层仅有1株针叶树,所以并未对其指标进行计算。
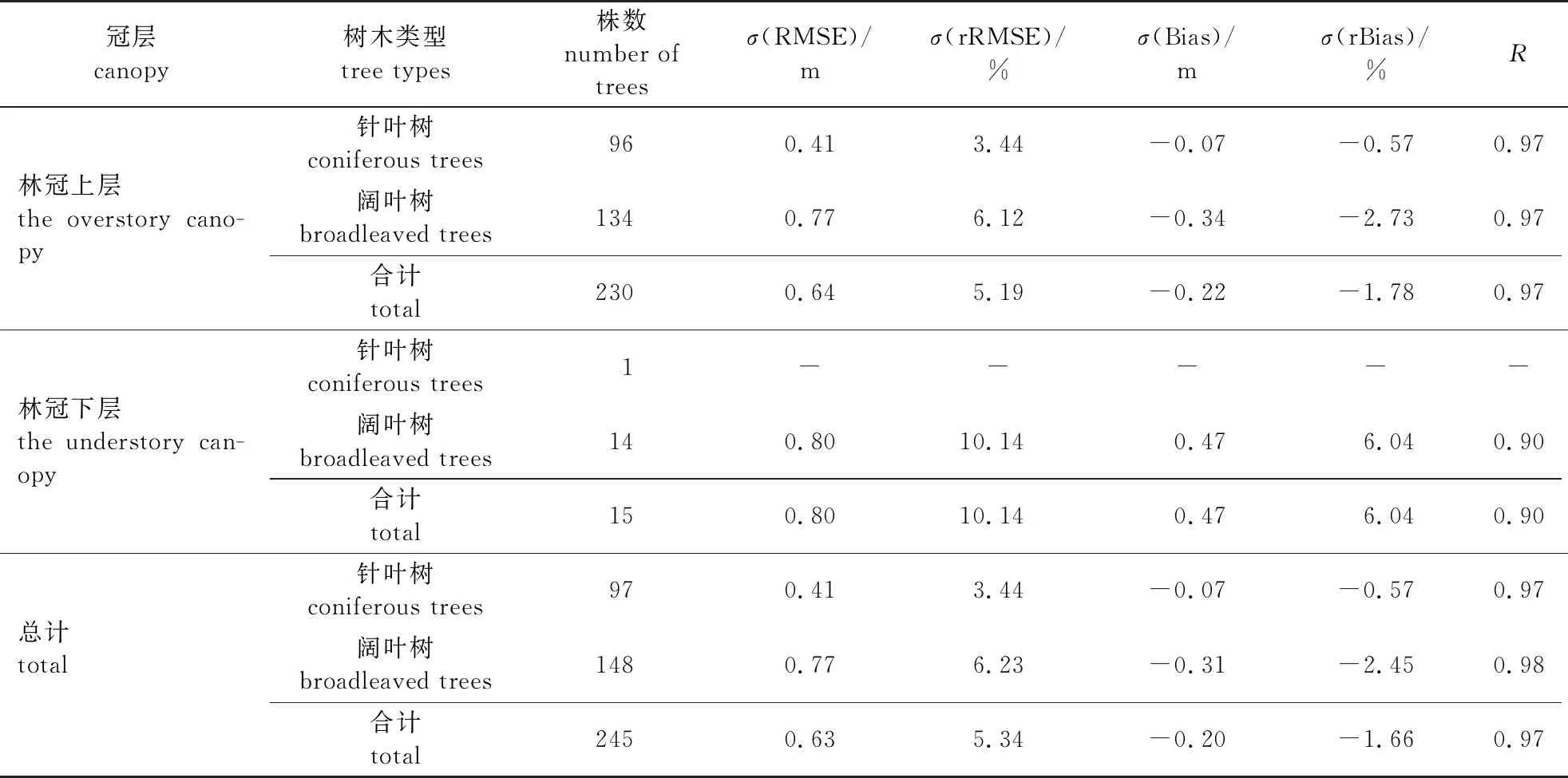
表3 基于ULS的估测树高和样地实测树高的比较
总体来看,应用ULS数据提取的单木树高和应用超声测高仪实测单木树高之间的相关性很强,相关系数为0.97。应用ULS数据提取的单木树高存在低估现象,特别是阔叶树被明显低估了,rBias为-2.45%;针叶树也存在略微的低估现象,rBias为-0.57%。从估测效果来看,针叶树要比阔叶树估测结果更接近实测树高,针叶树RMSE仅为0.41 m,阔叶树为0.77 m;针叶树rRMSE为3.44%,阔叶树为6.23%。
由表3可知,在不同的林冠层中,不同树木类型树高的提取精度有所不同。在林冠上层,针叶树和阔叶树的相关系数都为0.97,应用ULS提取的树高都被低估了,总体rBias为-1.78%,其中阔叶树树高比针叶树树高低估得更严重一些,针叶树的rBias为-0.57%,阔叶树的rBias为-2.73%,在树高的估测误差(rRMSE)上,针叶树要比阔叶树的估测误差小2.68%。在林冠下层,估测的阔叶树树高存在很大误差,其RMSE为0.80 m,rRMSE为10.14%,比林冠上层阔叶树的rRMSE约高出4%。在林冠下层,基于ULS提取的树高和样地实测树高的相关性比林冠上层的相关性略低,但仍具有很强的相关性(R=0.90)。
应用ULS数据估测的树高与实测树高比较得到的rRMSE随冠层高度的变化见图2。对于所有树木来说,基于ULS提取的树高误差(rRMSE)在>9~11 m冠层范围比≤9 m的范围有了明显的减小,rRMSE由10.46%减小到8.49%;在>11~13 m冠层范围,估测树高的rRMSE最小,仅为3.78%,这是由于在>11~13 m的冠层范围,ULS点云和样地实测均容易发现树顶并测量树高,因此具有较小的误差;在13 m以上,随着冠层高度升高,rRMSE略有升高,增加了约1.7%,上升的趋势要远小于林冠下层。基于ULS估测的阔叶树误差具有相同的变化规律,说明阔叶树的误差变化规律起主导作用。

图2 基于ULS的估测树高和样地实测树高的rRMSE随冠层高度的变化
2.3.2 基于TLS的估测树高与实测树高比较
去掉TLS探测树高的离群值后,共有单木280株,其中林冠上、下层分别有单木227、53株,与样地实测树高比较结果见表4。TLS对林冠下层探测提取的单木树高的rRMSE要远远小于林冠上层树高,相同林冠层中,针叶树的rRMSE也要小于阔叶树。

表4 基于TLS估测树高和样地实测树高的比较
总体来看,TLS探测提取的树高和样地实测树高之间的相关性很强,相关系数为0.98,针叶树和阔叶树均存在低估现象,特别是阔叶树,其rBias为-4.07%,被明显低估了,针叶树也存在一定的低估现象,rBias为-2.51%。从估测效果来看,针叶树要比阔叶树的树高估测更准确,针叶树RMSE为0.60 m,阔叶树为0.95 m;针叶树rRMSE为5.62%,阔叶树为8.30%。
由表4可知,在不同的林冠层中,不同树木类型的树高误差也有所不同。在林冠上层,阔叶树被低估的程度比针叶树更明显,阔叶树的rBias为-4.70%,针叶树的rBias为-3.23%。在估测误差(rRMSE)上,阔叶树比针叶树误差更大,rRMSE比针叶树高2.69%;在林冠下层,TLS探测提取的针叶树树高误差略小于阔叶树,rRMSE比阔叶树低1.16%,针叶树和阔叶树的rBias分别为2.00%和2.22%,存在高估现象。
应用TLS数据估测的树高与实测树高比较得到的rRMSE随冠层高度的变化见图3。总体来看,随着冠层高度的增加,基于TLS估测树高误差(rRMSE)也在不断增加,在9 m冠层高度以上, rRMSE迅速增大,在>9~17 m的冠层高度上,rRMSE增加了约5.9%。基于TLS估测的阔叶树和针叶树树高的误差具有同样的变化规律,阔叶树树高的rRMSE仍然主导着总体变化规律,而对于针叶树来说,rRMSE变化更稳定一些,rRMSE最小值出现在>7~9 m冠层范围(3.23%),最大值出现在>13 m冠层(5.52%),变化幅度仅为2.29%,而阔叶树树高的误差变化幅度高达6.71%。

图3 基于TLS的估测树高和样地实测树高的rRMSE随冠层高度的变化
2.3.3 基于ULS和TLS估测树高的比较
基于ULS估测树高和基于TLS估测树高的比较如表5所示。由于在林冠下层,应用ULS仅探测到1株针叶树,因此并未对其指标进行计算。

表5 基于ULS和TLS估测树高的比较
由表5可知,分别基于ULS和TLS估测的树高具有很好的相关性(总体相关系数为0.95)。总体而言,基于TLS估测的树高要比基于ULS估测的树高偏低,rBias为-3.56%,TLS和ULS探测提取的针叶树和阔叶树树高相差不大,rRMSE仅相差0.18%。
由表5可知,在林冠上层,基于TLS估测的树高要比基于ULS估测的树高偏低,rBias为-3.60%,而在冠下层,基于TLS估测的树高要比基于ULS估测的树高偏高,rBias为0.69%。这是由于TLS和ULS均受到冠层遮蔽的影响,在林冠上层,TLS不能对树顶进行完整扫描,因此TLS估测的树高要比ULS估测的树高偏低;在林冠下层,ULS对树木扫描不充分,因此ULS估测的树高要比TLS估测的树高偏低。
分别应用ULS和TLS数据估测树高得到的rRMSE随冠层高度的变化见图4。由图4可知,rRMSE变化范围为5%~8%,在>9~13m冠层范围的rRMSE最小(约为5%),随着冠层高度的增加或减小,rRMSE也逐渐增加。阔叶树的rRMSE具有相同的变化规律,说明阔叶树的误差变化起主导作用。

图4 基于ULS和TLS估测树高的rRMSE随高度的变化
3 讨 论
3.1 基于CHD的林冠分层优势
传统的林层划分方法需以实测数据,并综合考虑各林层每公顷蓄积量、相邻林层间林木平均高、各林层平均胸径以及主林层和其他林层的郁闭度人为地划分[38],容易受外部环境及人为主观因素的影响,分层依据的数据为外业实测获得,费时费力,不利于大面积推广。基于ULS获取的点云数据受外部环境干扰小,能客观地描述林分冠层结构。由ULS点云计算得到的CHD可以用来描述冠层元素的垂直分布情况,体现了森林植被在垂直方向上的层次性和空间配置方式[34],本研究使用Lloyd算法计算CHD对林冠层进行分层也获得了较好的研究结果,这与Maltamo等[31]的研究结果一致,因此,基于CHD对林冠层进行划分能够较好地反映不同数据源(ULS和TLS)估测树高的适用范围,而且计算简便,可以应用于大面积的估测,具有一定的推广意义。
3.2 离群值产生的原因分析
ULS产生的离群值主要在林冠下层,是由于冠层的遮蔽对单木冠顶产生了误判;而在林冠上层,对于部分树冠相互交叉重叠的树木,在人工解译过程中难以正确判断冠顶的位置而产生离群值。TLS产生的离群值大部分出现在林冠上层,与林冠层枝叶的密集程度密切相关,枝叶越密集,在TLS点云上越容易产生树顶的误判。特别是与周围树冠的相互交叉给TLS的树高提取带来了困难,由此产生了离群值。实测树高的误差也有可能产生离群值,比如具有偏冠、歪斜的单木,有可能在野外调查中冠顶定位发生了偏移,从而产生了离群值。与LiDAR系统相比,野外样地调查中受多种条件的影响,包括树种、冠层密集程度和树冠的形状等,这些因素都会对单木树高的精度产生影响[3]。本研究的结果与Wang等[19]的研究结果相似:ULS提取树高的离群值主要是由树冠部分被覆盖的单木引起,TLS提取树高的离群值出现在高林分密度(2 000株/hm2)的优势木中,由于TLS视角的原因,容易产生系统性低估。
3.3 不同数据源对树高估测精度的影响
无论在林冠上层还是林冠下层,针叶树和阔叶树树高的所有评价指标(RMSE、rRMSE、Bias、rBias和Pearson相关系数)均大体相同,说明对于不同树木种类(针叶树和阔叶树),基于ULS估测的树高与TLS相比,误差没有明显波动;随着冠层高度的增加,rRMSE均逐渐增加。这主要是由于树木越高,TLS越不容易扫描到树顶,与ULS的一致性逐渐减小;而树高越低,ULS越不容易扫描到树顶,与TLS的一致性也减小。这种一致性的变化规律表明:当TLS和ULS均能对单木进行准确的扫描时,均具有准确提取树高的能力[19]。
在不同的林冠层中,ULS和TLS提取的不同树木类型的树高精度有所不同。由表3和表4中对于ULS和TLS在林冠上层提取的树高精度进行交叉比较发现,在林冠上层,ULS比TLS估测的树高更接近实测树高,rRMSE相差2.56%,且ULS和TLS提取的针叶树树高要比阔叶树树高更接近实测树高。由于冠层的遮挡,TLS并不能很好地对冠层上部特别是树顶进行扫描,在本研究中的rBias约为-6.50%,存在低估现象,这与文献[11-12]的研究结果一致。在>9~17 m的冠层高度上,rRMSE持续增大,增加了约5.9%,说明高度越高,TLS点云数字化能力越弱,提取的树高误差越大。这种现象在阔叶树中的表现非常明显,而林冠上层的针叶树情况稍好,但是在点云中也存在树顶数字化不完全的情况。本研究中,ULS估测的rRMSE在林冠上层增加了约1.7%,有逐渐增大的趋势,推测有两点原因:一方面,林冠上层的树冠有交叉重叠的现象,影响了ULS对冠顶点的识别;另一方面,有可能是切线法测树高的缺陷造成的,即超声测高仪很难正确瞄准高大阔叶树的顶点而造成估测结果偏高,且冠层越高趋势越明显[3]。在林冠下层,由于林冠层的遮挡,ULS对下层大部分树木扫描不充分,探测到的数量比较少,而且难以确定冠顶点的位置,rRMSE达到了10.14%,与实测的树高相比误差较大。对表3和表4中ULS和TLS在林冠下层提取的树高精度进行交叉比较发现,ULS与TLS探测提取的树高相比,rRMSE高6.31%。对于TLS来说,林冠下层无论针叶树还是阔叶树的rRMSE均稳定在3%~5%,说明TLS在林冠下层能比较稳定地估测树高,且针叶树树高的rRMSE比阔叶树减少了约1.2%。在林冠下层树木枝叶密集,对于部分树冠相互交叉的树木,在ULS和TLS点云上很难正确发现树顶点,这种现象在阔叶树表现得更加明显,因为阔叶树的树冠更容易相互交叉,而大部分针叶树有规则的冠型,树顶更容易被识别。
参考文献(reference):
[1]ZHAO D H, KANE M, MARKEWITZ D, et al. Additive tree biomass equations for midrotation loblolly pine plantations[J]. For Sci, 2015, 61(4): 613-623. DOI:10.5849/forsci.14-193.
[2]ZOU W T, ZENG W S, ZHANG L J, et al. Modeling crown biomass for four pine species in China[J]. Forests, 2015, 6(12): 433-449. DOI:10.3390/f6020433.
[3]LARJAVAARA M, MULLER-LANDAU H C, METCALF J. Measuring tree height: a quantitative comparison of two common field methods in a moist tropical forest[J]. Methods Ecol Evol, 2013, 4(9): 793-801. DOI:10.1111/2041-210x.12071.
[4]ZHEN Z, QUACKENBUSH L J, ZHANG L J. Trends in automatic individual tree crown detection and delineation: evolution of LiDAR data[J]. Remote Sens, 2016, 8(4): 333. DOI:10.3390/rs8040333.
[5]ANDERSON K, GASTON K J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology[J]. Front Ecol Environ, 2013, 11(3): 138-146. DOI: 10.1890/120150.
[7]WALLACE L, LUCIEER A, WATSON C, et al. Development of a UAV-LiDAR system with application to forest inventory[J]. Remote Sens, 2012, 4(6): 1519-1543. DOI: 10.3390/rs4061519.
[8]HOPKINSON C, CHASMER L, YOUNG-POW C, et al. Assessing forest metrics with a ground-based scanning lidar[J]. Can J For Res, 2004, 34(3): 573-583. DOI: 10.1139/x03-225.
[9]PFEIFER N, WNTERHALDER D. Modelling of tree cross sections from terrestrial laser scanning data with free-form curves[J]. Pro of Isp Wor Las Sca for For and Lan Ass, 2004, 36(8): 76-81. DOI: 10.1109/TEST.2004.1387399.
[10]熊妮娜, 王佳. 基于地基激光雷达的活立木材积提取算法[J]. 林业工程学报, 2020, 5(6): 143-148. XIONG N N, WANG J. Extratction algorithm for stand volume using ground-based laser scanner[J]. J For Eng, 2020, 5(6): 143-148. DOI:10.13360/j.issn.2096-1359.202001035.
[11]BREDE B, LAU A, BARTHOLOMEUS H, et al. Comparing Riegl Ricopter UAV LiDAR derived canopy height and DBH with terrestrial LiDAR[J]. Sensors, 2017, 17(10): 2371. DOI: 10.3390/s17102371.
[12]李丹, 庞勇, 岳彩荣, 等. 基于TLS数据的单木胸径和树高提取研究[J]. 北京林业大学学报, 2012, 34: 79-86. LI D, PANG Y, YUE C R, et al. Extraction of DBH and height of single tree based on TLS data[J]. Journal of Beijing Forestry University, 2012, 34: 79-86. DOI:10.13332/j.1000-1522.2012.04.027.
[13]BEYENE S M, HUSSIN Y A, KLOOSTERMAN H E, et al. Fo-rest inventory and aboveground biomass estimation with terrestrial LiDAR in the tropical forest of Malaysia[J]. Can J Remote Sens, 2020, 46(2): 130-145. DOI:10.1080/07038992.2020.1759036.
[14]GOODWIN N R, COOPS N C, CULVENOR D S. Assessment of forest structure with airborne LiDAR and the effects of platform altitude[J]. Remote Sens Environ, 2006, 103(2): 140-152. DOI:10.1016/j.rse.2006.03.003.
[15]ANDERSEN H E, REUTEBUCH S E, MCGAUGHEY R J. A rigorous assessment of tree height measurements obtained using airborne lidar and conventional field methods[J]. Can J Remote Sens, 2006, 32(5): 355-366. DOI: 10.5589/m06-030.
[16]SIBONA E, VITALI A, MELONI F, et al. Direct measurement of tree height provides different results on the assessment of LiDAR accuracy[J]. Forests, 2016, 8(1): 7. DOI: 10.3390/f8010007.
[18]WALLACE L, MUSK R, LUCIEER A. An assessment of the repeatability of automatic forest inventory metrics derived from UAV-borne laser scanning data[J]. IEEE Trans Geosci Remote Sens, 2014, 52(11): 7160-7169. DOI:10.1109/TGRS.2014.2308208.
[20]VAGLIO LAURIN G, DING J Q, DISNEY M, et al. Tree height in tropical forest as measured by different ground, proximal, and remote sensing instruments, and impacts on above ground biomass estimates[J]. Int J Appl Earth Obs Geoinformation, 2019, 82: 101899. DOI:10.1016/j.jag.2019.101899.
[21]TANABE S I, TODA M J, VINOKUROVA A V. Tree shape, fo-rest structure and diversity of drosophilid community: comparison between boreal and temperate birch forests[J]. Ecol Res, 2001, 16(3): 369-385. DOI: 10.1046/j.1440-1703.2001.00402.x.
[22]MIURA N, JONES S D. Characterizing forest ecological structure using pulse types and heights of airborne laser scanning[J]. Remote Sens Environ, 2010, 114(5): 1069-1076. DOI: 10.1016/j.rse.2009.12.017.
[23]郎春博, 贾鹤鸣, 邢致恺, 等 . 基于改进粒子群算法的植物冠层图像分割[J]. 森林工程,2019,35(1):47-52. LANG C B, JIA H M, XING Z K,et al. Multi threshold segmentation of plant canopy image based on improved particle swarm optimization[J]. Forest Engineering,2019,35(1):47-52.
[24]胡文杰, 崔鸿侠, 王晓荣, 等. 三峡库区马尾松次生林林分结构特征分析[J]. 南京林业大学学报(自然科学版), 2019, 43(3): 67-76. HU W J, CUI H X, WANG X R, et al. Structure characteristics ofPinusmassonianasecondary forest in the Three Reservoir Area[J]. J Nanjing For Univ (Nat Sci Ed), 2019, 43(3): 67-76. DOI:10.3969/j.issn.1000-2006.201805075.
[25]胡传伟, 孙冰, 庄梅梅, 等. 深圳羊台山近自然风景林树种组成与垂直结构[J]. 南京林业大学学报(自然科学版), 2010, 34(4): 112-116. HU C W, SUN B, ZHUANG M M, et al. Study on species composition and vertical structure of near-nature scenic forest in Mt.Yangtai, Shenzhen[J]. J Nanjing For Univ (Nat Sci Ed), 2010, 34(4): 112-116. DOI: 10.3969/j.issn.1000-2006.2010.04.025.
[26]ZIMBLE D A, EVANS D L, CARLSON G C, et al. Characterizing vertical forest structure using small-footprint airborne LiDAR[J]. Remote Sens Environ, 2003, 87(2/3): 171-182. DOI: 10.1016/S0034-4257(03)00139-1.
[27]赵静, 李静, 柳钦火. 森林垂直结构参数遥感反演综述[J]. 遥感学报, 2013, 17(4): 697-716. ZHAO J, LI J, LIU Q H. Review of forest vertical structure parameter inversion based on remote sensing technology[J]. J Remote Sens, 2013, 17(4): 697-716. DOI:10.11834/jrs.20132183.
[28]ZHAO K G, POPESCU S, NELSON R. Lidar remote sensing of forest biomass: a scale-invariant estimation approach using airborne lasers[J]. Remote Sens Environ, 2009, 113(1): 182-196. DOI:10.1016/j.rse.2008.09.009.
[29]QIN H M, WANG C, XI X H, et al. Simulating the effects of the airborne lidar scanning angle, flying altitude, and pulse density for forest foliage profile retrieval[J]. Appl Sci, 2017, 7(7): 712. DOI:10.3390/app7070712.
[30]LEFSKY M A, COHEN W B, ACKER S A, et al. Lidar remote sensing of the canopy structure and biophysical properties of Douglas-fir western hemlock forests[J]. Remote Sens Environ, 1999, 70(3): 339-361. DOI: 10.1016/S0034-4257(99)00052-8.
[31]MALTAMO M, PACKALÉN P, YU X, et al. Identifying and quantifying structural characteristics of heterogeneous boreal forests using laser scanner data[J]. For Ecol Manag, 2005, 216(1/2/3): 41-50. DOI:10.1016/j.foreco.2005.05.034.
[32]ZHAO X Q, GUO Q H, SU Y J, et al. Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas[J]. ISPRS J Photogramm Remote Sens, 2016, 117: 79-91. DOI:10.1016/j.isprsjprs.2016.03.016.
[33]SCHNABEL R, KLEIN R. Octree-based point-cloud compression[C]//Eur Sym Point-Based Gra, 2006: 111-120. DOI: 10.2312/SPBG/SPBG06/111-120.
[34]刘浩, 张峥男, 曹林. 机载激光雷达森林垂直结构剖面参数的沿海平原人工林林分特征反演[J]. 遥感学报, 2018, 22(5): 872-888. LIU H, ZHANG Z N, CAO L. Estimating forest stand characteristics in a coastal plain forest plantation based on vertical structure profile parameters derived from ALS data[J]. J Remote Sens, 2018, 22(5): 872-888. DOI:10.11834/jrs.20187465.
[35]LLOYD S. Least squares quantization in PCM[J]. IEEE Trans Inf Theory, 1982, 28(2): 129-137. DOI:10.1109/TIT.1982.1056489.
[36]BAZEZEW M N, HUSSIN Y A, KLOOSTERMAN E H. Integrating airborne LiDAR and terrestrial laser scanner forest parameters for accurate above-ground biomass/carbon estimation in Ayer Hitam tropical forest, Malaysia[J]. Int J Appl Earth Obs Geoinformation, 2018, 73: 638-652. DOI:10.1016/j.jag.2018.07.026.
[37]LEFSKY M A, COHEN W B, ACKER S A, et al. Lidar remote sensing of forest canopy structure and related biophysical parameters at H. J. Andrews Experimental Forest, Oregon, USA[C]//IGARSS ’98. Sensing and Managing the Environment. 1998 IEEE International Geoscience and Remote Sensing. Symposium Proceedings. (Cat. No. 98CH36174). July 6-10, 1998, Seattle, WA, USA. IEEE, 1998: 1252-1254. DOI:10.1109/IGARSS.1998.691367.
[38]李凤日. 测树学[M]. 4版. 北京: 中国林业出版社, 2019:64. LI F R.Forest mensuration[M].4th ed. Beijing:China Forestry Publishing House,2019: 64.
猜你喜欢
农业工程学报(2022年14期)2022-10-19
地理空间信息(2021年10期)2021-11-14
遥感信息(2019年1期)2019-03-22
森林工程(2018年5期)2018-05-14
农民致富之友(2017年4期)2017-04-10
现代农业科技(2017年4期)2017-04-10
现代农业研究(2017年2期)2017-04-01
绿色科技(2017年1期)2017-03-01
科学与财富(2016年26期)2016-12-01
湖北农业科学(2014年3期)2014-07-21
