
阵列天线抗干扰对RTK的影响研究
2021-07-27 01:53魏敬法
现代导航 2021年3期
魏敬法
阵列天线抗干扰对RTK的影响研究
魏敬法
(中国电子科技集团公司第二十研究所,西安 710068)
随着GNSS的高速发展,基于载波相位的RTK技术受到高度重视,在无人机着陆和大地测绘等方面具有广泛应用。由于卫星距离遥远,信号功率低,很容易受到干扰影响,阵列天线抗干扰技术具有良好的抗干扰性能,可以有效解决GNSS信号弱和易受干扰的问题,因而也受到高度重视。本文在RTK技术和阵列天线抗干扰技术原理分析的基础上,总结了阵列天线抗干扰对载波相位差分影响的主要因素,介绍了解决抗干扰条件下实现高精度定位的具体措施,为抗干扰高精度定位提供技术基础。
RTK;高精度定位;抗干扰;载波相位
0 引言
全球卫星导航系统(Global Navigation Satellite System,GNSS)卫星信号具有码伪距和载波相位两种观测值,其中,码伪距长度为十米到百米量级,通过单点或码伪距差分定位可以实现米级定位。载波相位长度大约为20 cm,利用基于载波相位差分的高精度实时定位技术(Real Time Kinematic,RTK)可实现厘米级定位,在高精度定位领域具有广泛应用。
由于GNSS卫星信号功率微弱,极易受到干扰信号影响,因此卫星导航抗干扰技术受到高度重视。其中,阵列天线抗干扰技术在空域进行信号处理,利用不同阵元信号的自适应加权合成,在干扰来波方向形成零陷,具有很好的抗干扰性能,因而受到广泛关注。但阵列天线抗干扰的同时也对GNSS载波相位观测值造成一定影响,进而导致RTK定位成功率和精度迅速下降,如何在抗干扰的同时实现高精度的RTK定位也成为GNSS研究的主要方向之一[1-3]。
1 基本原理
1.1 RTK原理
RTK技术基于差分原理,通过基准站与移动站的载波相位观测量的差分消除各种公共误差,实时计算载波相位距离,进而得到高精度定位结果,定位精度可达到厘米量级。载波相位差分定位的具体过程如图1所示,利用基准站和移动站接收机的观测量建立双差方程进行浮点解和固定解计算,最终得到高精度相对定位(基线)结果。

图1 载波相位差分定位过程示意
对于接收机收到卫星信号的载波相位观测方程如式(1)所示:

设接收机对卫星同时观测,对接收机间载波相位作单差,如式(2)所示:

对于接收机其卫星钟差完全一致,可通过单差完全消除。而电离层和对流层延迟误差在区域内变化较小,也可通过单差大大消弱。
在接收机间单次差分的基础上,再进行卫星间差分,可得到双差观测模型,对于同一卫星系统,选取卫星为参考卫星,双差观测方程如式(3)所示:

接收机钟差在同一卫星系统不同卫星间完全一致,可通过双差模型完全消除。
双差后残余包括两台接收机相对距离(基线)、整周模糊度、电离层延迟、对流层延迟和噪声多径等误差。其中,对于短基线电离层和对流层延迟已大大降低,可忽略不计,对于长基线可通过双频进一步消弱电离层延迟。
利用双差模型实现RTK定位的核心是得到整周模糊度,利用最小二乘原理求解基线,可以通过双差模型线性化处理得到误差方程矩阵如式(4)所示:

式中,为双差模型残差;为基线向量;为整周模糊度;A为的系数矩阵;B为的系数矩阵;为观测量与站星之间几何距离的差值。
对于单历元,假设两台接收机共视卫星数为,则载波相位双差方程数为-1,需要求解未知量包括基线(d,d,d)以及-1个整周模糊度改善法方程病态性,提高整周模糊度的解算速度与成功率。
整周模糊度的解算主要通过先浮点后固定的过程来进行,具体算法不作详细论述。
在确定整周模糊度后可进一步得到高精度相对定位(基线)结果。
1.2 空频阵列天线抗干扰原理
卫星信号到达地面时只有-130 dBm,极易受到干扰。在复杂的电磁环境下,卫星导航的脆弱性成为制约其持续稳定定位的主要因素。卫星导航抗干扰技术,利用方向图可控天线阵,实时自适应地生成空域滤波权矢量,并作加权处理,使抗干扰天线在空间来向未知的干扰方向自适应地形成零陷,或在卫星信号入射方向形成增益,获得良好的信噪比。这对于战时复杂电磁环境下惯性/卫星组合导航的生存能力,有至关重要的意义。因为干扰个数、带宽和时变性各不同,对抗干扰阵列天线的自由度、各通道的一致性及抗干扰算法的运算速度都有严苛要求,因此抗干扰算法及其高效实现成为卫星导航专业中非常复杂和必要的研究方向。
在复杂电磁环境下,干扰个数、类型、带宽和时变特性各不相同,空域抗干扰技术性能迅速下降,联合空域和频域的抗干扰技术可以有效提高卫星导航系统抗干扰能力,提高卫星导航信号适应力。
阵列天线阵列处理利用导航信号与干扰信号的来波方向差异,通过空域自适应处理能够抑制干扰增强信号,从而改善输出信干噪比。但空域处理在面对宽带等复杂形式干扰时,性能严重下降。为了提高抗干扰能力,通过联合空域与频域自由度,能够极大改善自适应阵列的抗干扰能力。
频域抗干扰原理如图2所示。
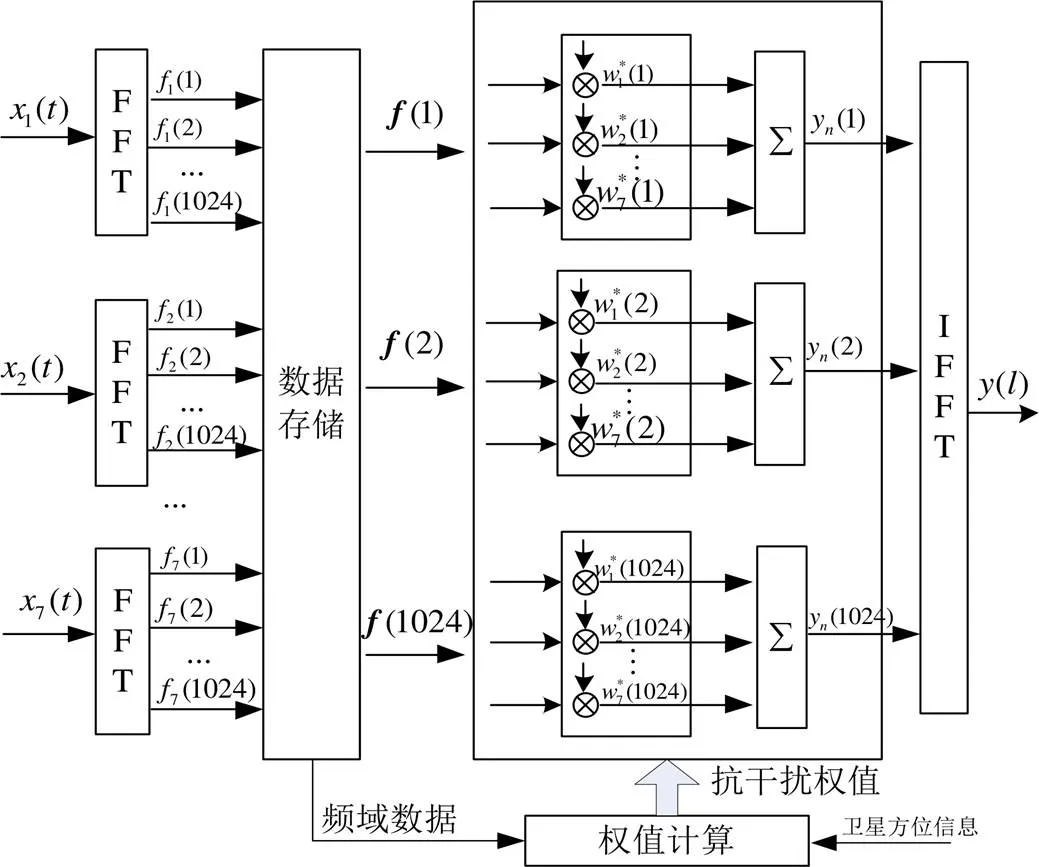
图2 频域抗干扰原理框图
对不同阵元接收到的数据进行快速傅立叶变换,然后对每个频点进行空域自适应权值计算,在干扰来向形成零陷,之后将每个频点权值与数据同步加权输出,最后通过逆傅立叶变换后得到抗干扰后信号。
2 影响RTK主要因素
为实现高精度定位,需详细分析定位误差来源并进行相应处理。GNSS定位的误差主要来源于三类[4-5]:与卫星相关的误差、与信号传播路径相关的误差以及与接收机相关的误差。
与卫星相关的误差包括卫星轨道误差、卫星钟差及卫星天线相位偏差。对于卫星轨道误差,主要来源于广播星历,其轨道误差对于相近区域内变化较小(影响大约为1 ppm),RTK定位过程中可忽略该部分误差;对于卫星钟差,在RTK定位中,双差模型可以消除卫星钟差的影响;对于卫星天线相位偏差,包括天线相位中心偏差和天线相位中心变化,该误差小于卫星轨道误差,RTK定位过程中可忽略该部分误差。
与信号传播路径相关的误差包括电离层误差、对流层误差、多径效应及干扰误差。对于电离层误差,短基线情况下,两台接收机电离层延迟近似,差分后残余误差可忽略不计,长基线情况下,可利用双频观测值组合等方法进一步消除电离层延迟误差;对于对流层误差,可通过差分进行消除,残余部分进一步通过模型抑制;对于多径效应,误差取决于天线周围的环境,一般通过天线和数据处理等技术抑制;对于干扰误差,需要采用抗干扰技术消除,但抗干扰的同时会影响高精度定位性能,后续章节会分析阵列天线抗干扰技术对高精度RTK定位的影响及处理措施。
与接收机相关的误差包括接收机钟差、观测噪声及接收天线相位中心变化。对于接收机钟差,对同一卫星系统不同卫星完全一致,星间差分可完全消除该误差;对于观测噪声,引起的误差较小,在RTK定位中可忽略不计;对于接收天线相位中心变化,与卫星天线类似,也存在天线相位中心偏差和天线相位中心变化两部分,高精度天线相位中心相对稳定,可进行精确标定,阵列天线存在加权处理,可能对不同来向信号差异较大,在高精度导航定位中需要考虑。
3 阵列天线抗干扰对RTK影响及处理措施
阵列天线阵通过多个阵元信号的合成实现干扰抑制。不同阵元间的差异、阵元间的相互影响以及加权系数的不同,都可能影响卫星信号,导致载波相位观测质量严重下降,影响RTK定位性能[6]。因此,阵列天线抗干扰应用于高精度卫星导航时,需要重点分析阵列天线抗干扰对卫星信号相位的影响。
3.1 天线参数对相位中心性能影响
GNSS天线一般采用微带贴片天线。对于高精度阵列天线而言,微带阵元特性对合成阵列相位中心特性有明显的影响。为尽量降低天线对相位中心的影响,在满足天线带宽需求的前提下,一般尽量选择介电常数低和介质板厚度相对较大的介质板材料,贴片形式一般采用圆形。
3.2 幅相特性对天线相位中心影响
阵列天线不同阵元存在差异,不同布阵方式、布阵误差以及射频因素等共同作用下,各天线阵元接收信号会存在幅相特性的差异,导致阵列波束相位中心受到影响,因此需要对该部分误差进行补偿。
3.3 不同准则下抗干扰算法对相位中心的影响
(1)PI算法
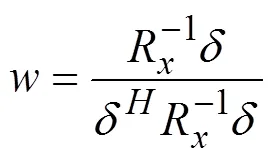
在复杂电磁环境下,干扰样式和来源等信息未知,考虑到导航信号强度远低于噪声,可采用功率倒置(Power-Inversion,PI)算法,以阵列输出功率最小为最优准则,通过调节各个阵元的加权系数,使最后抗干扰系统输出信号功率最小,实现干扰抑制和信干噪比的提高[7]。具体如式(5)所示:
党的十九大报告指出,要推进能源生产和消费革命,构建清洁低碳、安全高效的能源体系,这是我国新一轮能源革命的核心目标,对电网企业转型升级、改革创新提出了新的要求。云南绿色能源产业发展前景广阔,未来几年,以水电为基础的云南能源产业发展步伐将不断加快,新的能源发展格局,将对电网企业的运营管理、供电服务等产生深刻影响。南方电网云南电网公司通过准确把握能源发展的变革趋势,深入落实做强做优云南绿色能源产业的部署要求,超前做好工作,以“优化主网、做强配网、升级农网”为主线,大力提高云南电网的技术装备水平,加快建设安全、可靠、绿色、高效的智能电网。


求解可得最优解如式(6)所示:
(2)LCMV算法
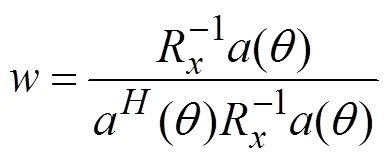
线性限制最小方差滤波器(Linearly Contrained Minimum Variance,LCMV)算法通过对加权矢量施加线性约束条件,以便有效地控制波束响应,使得从期望方向来的信号能以特定的增益与相位通过。同时约束波束指向卫星信号方向,使阵列总加权输出信号功率最小,最优权用优化问题表示如式(7)所示:

求解式(7)可得最优解如式(8)所示:
(3)两种算法对相延迟的影响
设卫星信号为(),则卫星信号经过阵列天线抗干扰处理后的输出如式(9)所示:
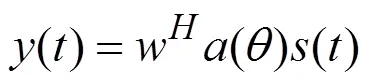
对于LCMV算法,卫星信号经过LCMV算法抗干扰处理后,信号保持不变。
4 抗干扰算法对相位的影响仿真分析
为分析抗干扰对导航信号相位影响,在无噪声环境下分别对上述抗干扰算法进行仿真,场景设置如下:
(1)阵列类型:4阵元均匀圆阵;
(2)信号强度:导航信号-130 dBm,干扰 -30 dBm;
(3)信号来向:固定卫星信号方向,改变干扰方位角(10°仰角)。
干扰、信号及抗干扰前后频谱如图3所示。

图3 干扰、信号及抗干扰前后频谱
对于PI和LMCV算法,抗干扰前后导航信号波形如图4所示。
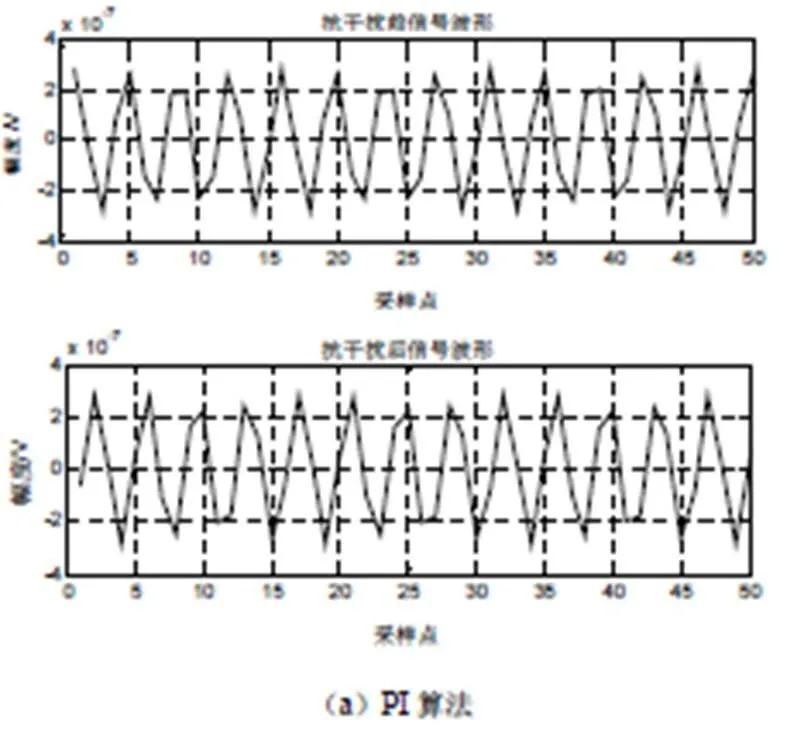
改变场景进行多次仿真,导航信号相位在抗干扰前后变化如图5所示。
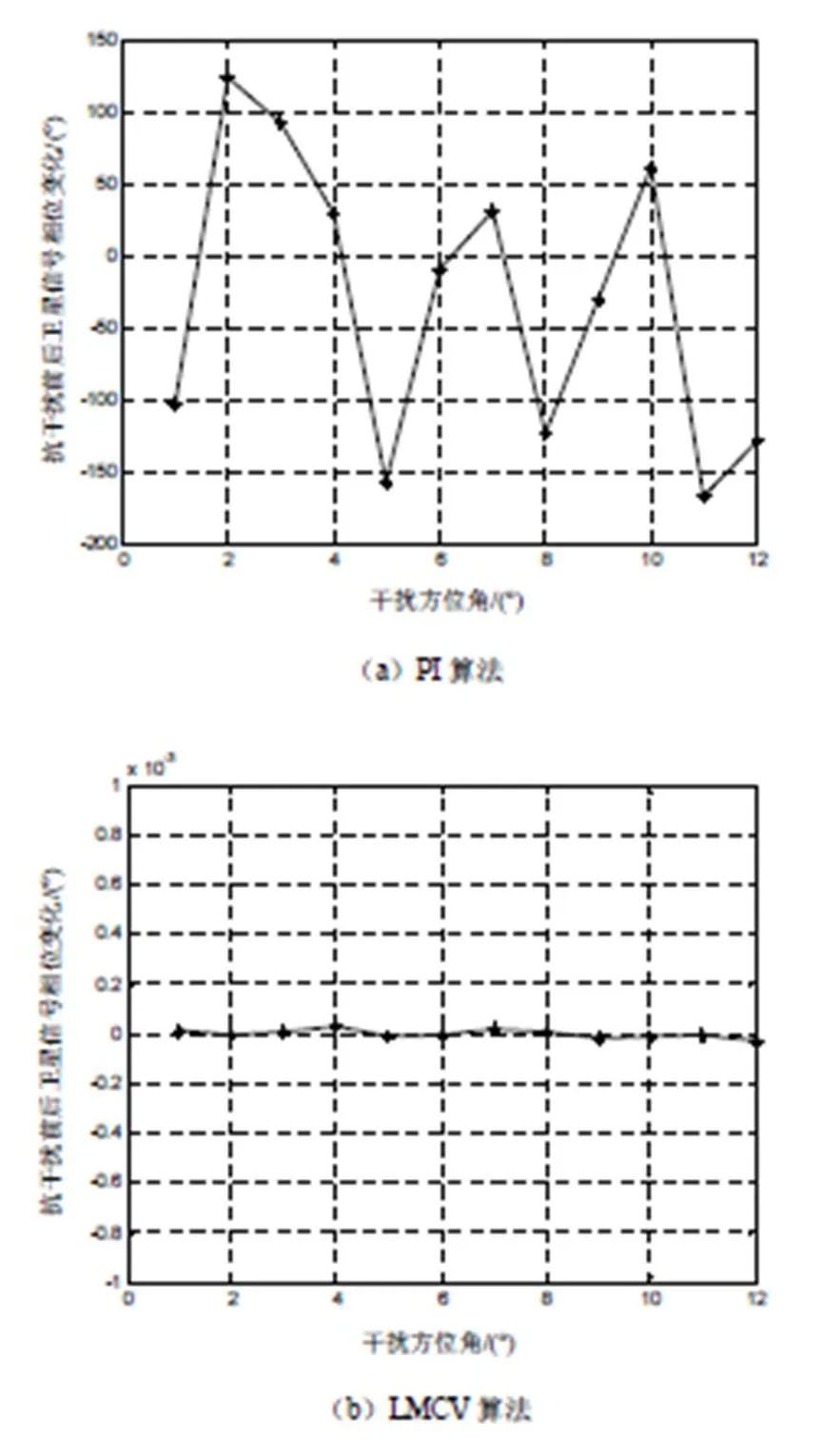
图5 抗干扰算法对信号相位影响
实际应用中,PI算法不需要先验信息,可直接用于调零抗干扰接收机,LMCV算法需要卫星先验信息,常用于数字多波束抗干扰接收机,对两种情况分别进行RTK性能测试,定位精度如图6所示。
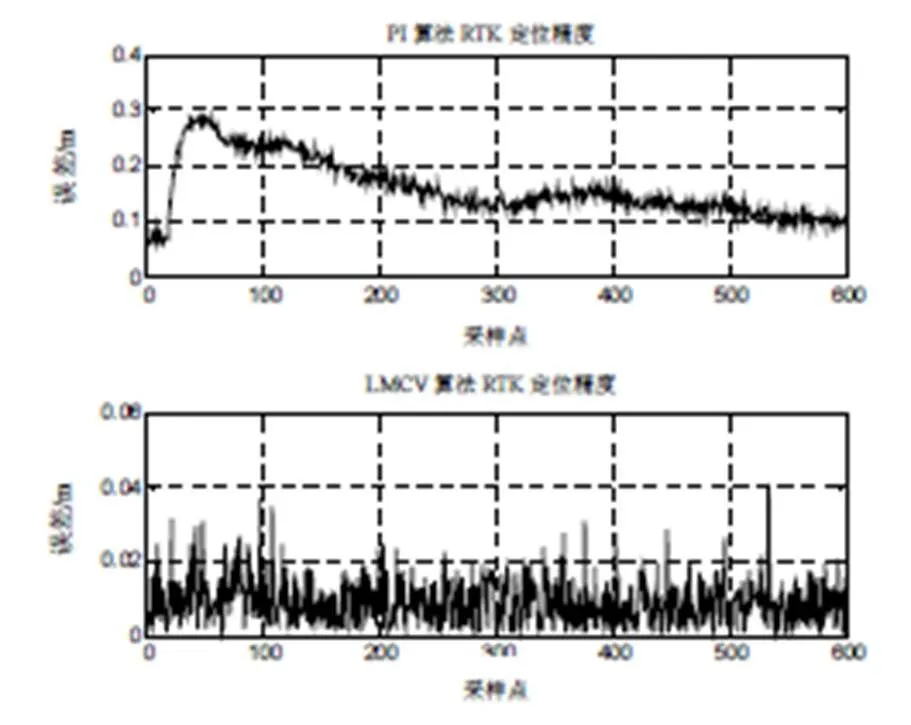
图6 不同抗干扰算法下RTK定位精度
由上述仿真及测试结果可以看出,PI算法对信号相位影响较大,严重影响高精度RTK定位,LMCV算法更适合高精度定位。
5 结论
GNSS具有快速、广泛覆盖和高精度等优点,但由于GNSS卫星信号强度较小,远远低于热噪声,极易受到干扰影响,抗干扰问题越来越受到重视。阵列天线抗干扰技术具有良好抗干扰性能,因此被广泛采用。与高精度天线相比,阵列天线及抗干扰处理又引入误差,影响高精度应用。综合考虑抗干扰和高精度应用,以空频抗干扰算法和RTK算法为典型,充分分析影响卫星信号载波相位观测量的影响因素及解决措施,主要包括以下方面:
(1)提高天线设计水平,保证天线相位中心稳定度;
(2)由于阵元差异、布阵误差和射频通道一致性等导致的幅相误差需要补偿,避免其对相位的影响;
(3)不同抗干扰处理算法也会影响卫星信号载波相位,多波束技术结合数字多波束接收机的研究可以实现不同来向卫星信号相位中心的一致性,是未来抗干扰高精度定位的重要方向。
[1] 方贝贝. 卫星导航调零天线相位中心校正方法研究[D]. 重庆:重庆大学,2019.
[2] 刘兵. GNSS天线相位中心及其抗干扰技术研究[D]. 成都:电子科技大学,2016.
[3] 李立勋. 高精度导航接收机天线技术研究[D]. 长沙:国防科学技术大学,2016.
[4] 谢世杰,奚有根. RTK的特点与误差分析[J]. 测绘工程, 2002,11(2).
[5] 杜锋. RTK技术在GPS/BDS组合定位中的误差分析与处理[D]. 西安:西安工程大学,2016.
[6] P.B. Anantharamu,D. Borio,G. Lachapelle. Self-contained GNSS-based Antenna Array Calibration[C]. 2011 International Technical Meeting of The Institute of Navigation. ION,2011:1232-1239.
[7] 居后鸿,曾庆化,岳亚洲,等. 两种卫星导航抗干扰算法对载波相位测量精度影响分析[J]. 全球定位系统,2015(01).
Research on Influence of Array Antenna Anti-Jamming on RTK
WEI Jingfa
With the rapid development of GNSS, high precision RTK based on carrier phase is highly valued and widely used in UAV landing, geodetic surveying and mapping. Due to the long distance and low signal power of satellite, it is easy to be affected by interference. The anti-jamming technology of array antenna has good anti-jamming performance, which can effectively solve the problem of weak GNSS signal and easy to be interfered. Based on the analysis of the principle of RTK technology and array antenna anti-jamming technology, the paper summarizes the main factors affecting the carrier phase difference caused by the anti-interference of array antenna, and introduces the specific measures to realize high-precision positioning under the anti-interference condition.
RTK; High Precision Positioning; Anti-Jamming; Carrier Phase
TN967.1
A
1674-7976-(2021)-03-168-06
2021-04-06。魏敬法(1979.08-),安徽芜湖人,博士,高级工程师,主要研究方向为卫星导航信号处理和后端处理,以及抗干扰高精度定位技术。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
北京航空航天大学学报(2017年9期)2017-12-18
光学精密工程(2016年3期)2016-11-07
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
现代工业经济和信息化(2016年8期)2016-05-17
