基于单浮标的水声/惯性组合导航定位与试验验证
2021-07-27 01:53:46程琦
现代导航 2021年3期
程 琦
基于单浮标的水声/惯性组合导航定位与试验验证
程 琦1,2
(1 中国电子科技集团公司第二十研究所,西安 710068;2 陕西省组合与智能导航重点实验室,西安 710068)
惯性导航由于其无源、自主等优点,在水下导航中处于中心地位,但惯性导航误差随时间增大,很难长时间提供精确的导航信息。针对此问题,本文提出一种基于单浮标的水声/惯性组合导航定位方法,借助水下潜航器的速度和方位信息,通过实际浮标和3个虚拟浮标的位置以及与水下潜航器之间的4个距离观测量,采用长基线导航定位技术,实现水下潜航器导航定位。试验结果表明,该方法相比惯性导航,减小了误差,提升了定位精度,可保证水下潜航器长航时实施水下作战任务。
水下潜航器;单浮标;水声导航;惯性导航
0 引言
我国作为发展中的海洋大国,在海洋有着广泛的战略利益。随着我国经济全球化的发展和开放型经济的形成与深化,海洋作为国际贸易与合作的纽带作用日益显现,在提供资源保障和拓展发展空间方面的战略地位更为突出。水下潜航器是勘探和开发利用海洋资源、调查海洋环境、完成海洋军事任务的关键技术装备,但是无论使用水下潜航器来满足何种任务需求,一般都需要获取水下潜航器的位置状态,故获取水下潜航器的高精度定位信息是我们需面临的关键问题之一[1-2]。
目前,惯性导航因其自主隐蔽、不受外界干扰、短时精度高、导航信息完备和数据更新率高等优点,在水下导航定位技术中处于中心地位,但惯性导航定位精度受限于器件性能,存在随时间不可避免的系统漂移,导航定位误差随时间不断累积,很难长时间地提供精确的导航定位信息,无法保证水下潜航器进行长航时实施水下作战任务[3-4]。基于声波的水声导航在水下导航技术中占据了重要的地位,具有兼顾深浅海、全天候实时性、可靠性高和误差不随时间累积的优点。传统的水声导航定位系统都有多个基元(接收器或应答器),一般用基线的长度来分类,分为长基线系统、短基线系统和超短基线系统[5]。
为保障水下潜航器能在深度水下进行长航时任务,需长时间提供高精度导航定位信息,本文研究了一种基于单浮标的水声/惯性组合导航定位方法,利用单浮标来完成水下潜航器的高精度定位。
1 基于单浮标的水声/惯性组合导航定位方法基本原理
为保障水下潜航器能在大深度水下进行长航时实施水下作战任务,需长时间提供高精度导航定位信息,本文研究了一种基于单浮标的水声/惯性组合导航定位方法。
对于单浮标导航定位计算,需要借助水下潜航器的速度和方位等传感器信息,才能完成定位解算。在单浮标导航定位中,由于只使用1个外部声学发射器,需要通过水下潜航器的运动,同时借助水下潜航器的速度和方位信息,根据实际浮标的位置以及声信号发射时刻,推定出另外3个虚拟浮标的位置,由实际浮标和3个虚拟浮标的位置以及与水下潜航器之间的4个距离观测量,就可以采用传统长基线导航(Long Baseline,LBL)的解算方法,进行水下潜航器位置解算,这种方法可以称为虚拟长基线导航(Virtual Long Baseline,VLBL)算法。虚拟长基线水声浮标导航定位的完整几何关系图如图1所示。
图1中,水下潜航器在1、2、3、4时分别运动到1、2、3、4处,每个水声虚拟浮标的位置必须调整到每个附加时间步长的潜航器位置。对这个调整的通用方程如式(1)所示:

式中,dt(i,i+1)为时间步长i和i+1之间的时间延迟;vi为在时间步长i的水下潜航器速度;AT为实际的水声浮标位置;VTi为对应到Ri的虚拟水声浮标的位置;Ri为水下潜航器和AT在时间步长i之间的距离。
设水下潜航器位置为(,,),真实浮标与3个虚拟浮标位置分别为(X,Y,Z)、(X,Y,Z)、(X,Y,Z)、(X,Y,Z),则定位方程如式(2)所示:
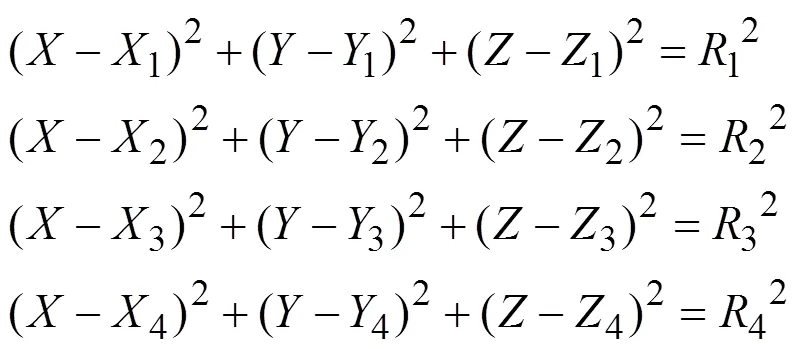
两两相减,消去二次项后化简如式(3)所示:
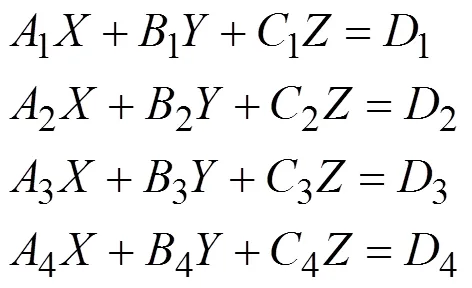
写为矩阵形式,如式(4)所示:

式中,

利用最小二乘法可得到最佳解如式(5)所示:

在单浮标水声定位中,需要用到包括水下潜航器惯导信息在内的航向和速度辅助信息,以实现定位解算。水下潜航器中的惯性导航系统包括平台惯导和捷联惯导系统,并进行冗余双备份以提高可靠性。尽管惯性导航系统可以提供很精确和高可靠性的姿态信息,但位置误差可能很大,因为它是加速度量测的二次积分。因此,本文借助惯导提供的水下潜航器信息,通过实际浮标和3个虚拟浮标的位置以及与水下潜航器之间的4个距离观测量,采用长基线导航定位技术,进行位置解算,获得较高精度的水下潜航器位置信息,实现水下潜航器导航定位,保障潜航器长航时实施水下任务。
2 水声/惯性组合导航试验验证
2.1 试验设备
发射端包括水声测距、通信浮标、RTK定位设备、笔记本电脑和电源,放置在发射试验船上。
接收端包括水声测距、通信浮标、惯性导航设备、RTK定位设备、笔记本电脑和电源,放置在接收试验船上。
岸上设备主要是RTK基准设备。
2.2 试验方案
采用一对水声测距通信浮标以及惯性导航设备,在湖里采用2艘船开展不同距离上的水声测距/惯性组合定位试验,评估组合导航系统性能。
在外场试验时,在发射端的船上配备高精度卫星导航设备以及水声通信测距浮标和笔记本电脑,在接收端的船上配备高精度RTK卫星定位设备、水声通信测距浮标、惯性导航设备和笔记本电脑等设备。发射端通过笔记本电脑网口来控制水声浮标发射通信和测距信号,接收船得到水声通信和测距信息后存储至笔记本中。同时,利用计算机采集惯性导航设备的原始输出和卫星导航输出。
采用单浮标水声定位算法,通过多个水声测距值,结合惯性定位信息进行定位解算处理,组合定位结果与卫星RTK定位结果进行比较。
3 试验结果分析
3.1 单浮标静止与接收船移动的组合导航试验
发射端作为单浮标处于静止状态,通过笔记本网口控制发射通信和测距信号,移动接收船体接收发射船的位置和距离信号。在接收端记录不同时刻的惯导系统原始输出、卫星导航输出以及发射端的距离、位置等信息。移动接收船分别按照规划的路线进行运动,每次移动距离400~800 m,至少移动4个位置。固定发射端试验路径规划图如图2所示。

图2 固定发射端试验路径规划
试验时,在多个接收点上同时采集惯导数据、卫导RTK数据以及水声测距数据,发射船和移动接收船的位置关系如图3所示。
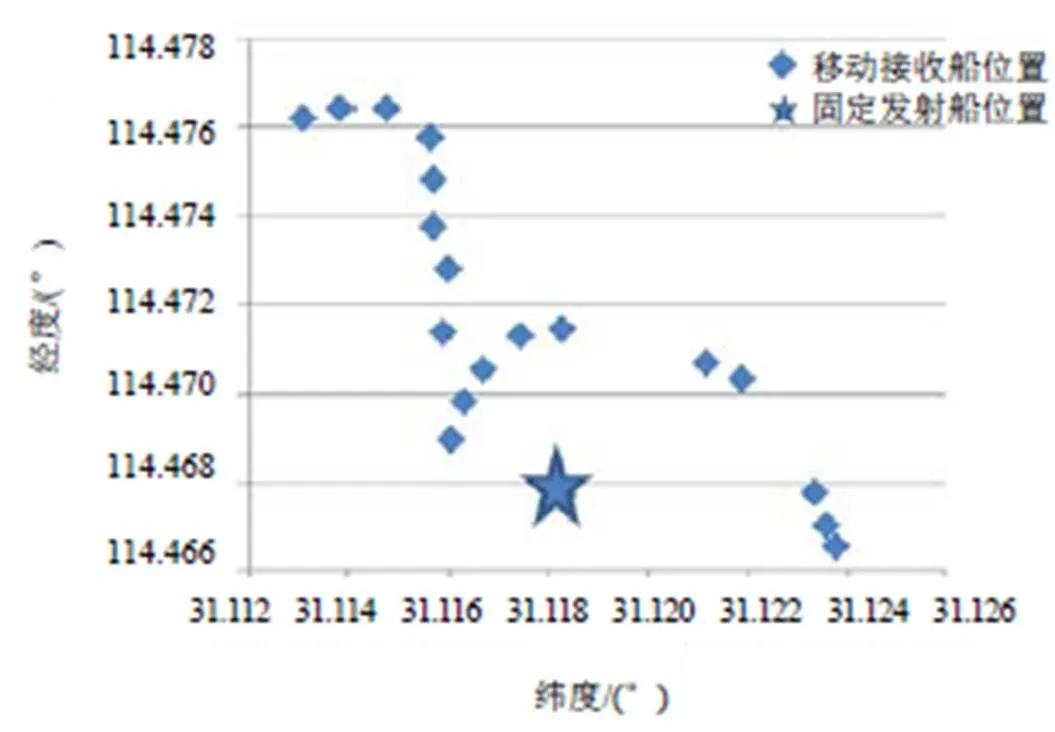
图3 固定发射浮标和接收点位置示意

图4 固定发射点组合定位选取数据
选择图3中几组数据进行定位解算,选取数据点如图4所示。
其中发射浮标位置为纬度31.11828540060°,经度114.46768954652°。位置1接收点卫导数据(纬度31.12358401784°,经度114.46703052911°),水声测距值=588 m;位置2接收点卫导数据(纬度31.12116053564°,经度114.47070311995°),水声测距值=429.5 m;位置3接收点卫导数据(纬度31.11670263719°,经度114.47055714038°),水声测距值=324.7 m;位置4接收点卫导数据(纬度31.11598018880°,经度114.47280404847°),水声测距值=550.2 m。
试验时,由于惯导(因经费所限,选用较低精度惯导)漂移误差较大,这里采用卫导变化量来代替惯导位置变化量,卫导变化量附加10 m左右的扰动,计算的用户位置为纬度31.1158°,经度114.4726°,与位置4接收点卫导RTK基准数据(纬度31.11598018880°,经度114.47280404847°)的误差为27.9 m(=1.62)。
3.2 发射船和接收船同时移动的组合导航试验
发射端作为运动中的单浮标,通过笔记本网口控制发射通信和测距信号,移动接收船体接收发射船的位置和距离信号。在接收端记录不同时刻的惯导系统原始输出、卫星导航输出以及发射端的距离、位置等信息。发射船和接收船分别按照规划的路线进行运动,其中,移动发射端从1时刻到4时刻的总移动范围30~50 m,移动接收船每次移动距离400~800 m,从1时刻到4时刻移动4个位置。移动发射端组合定位试验路径规划图如图5所示。
发射船在水面漂移,接收船移动的位置试验如图6所示。
选择其中的4组移动发射船和移动接收船数据,进行虚拟长基线定位计算,选择数据如图7和表1所示。

图5 移动发射端组合定位试验路径规划

图6 移动发射浮标和移动接收点位置示意
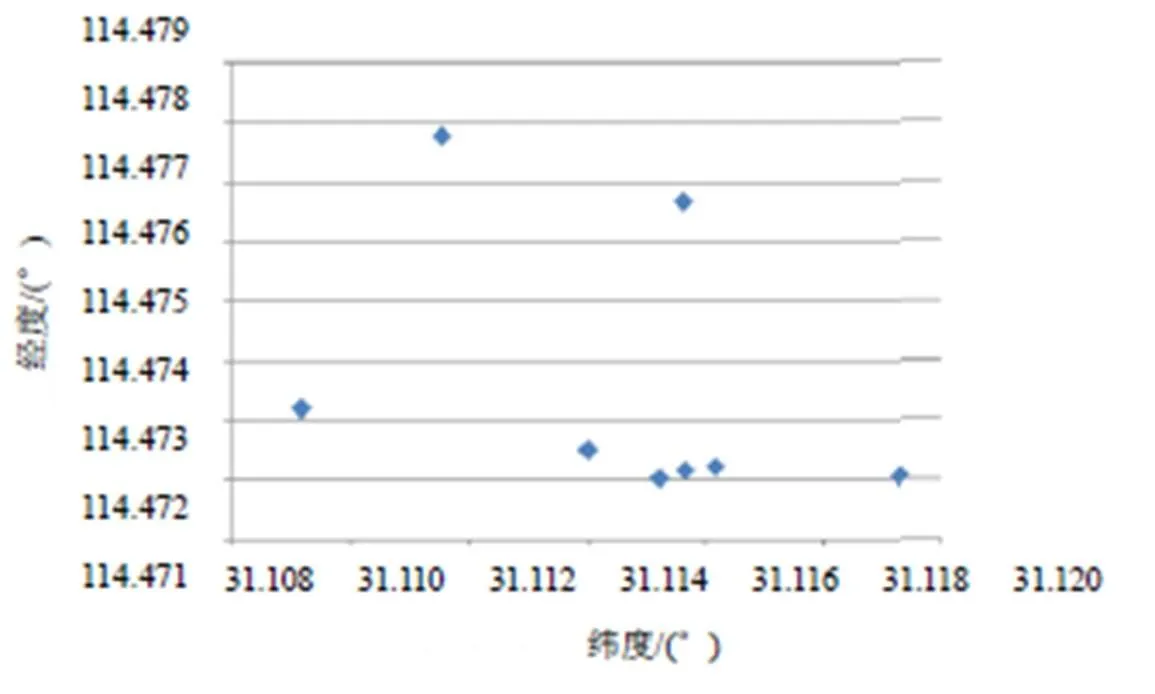
图7 移动发射浮标和移动接收点4组位置示意
采用以上4组数据,进行虚拟长基线定位解算结果(纬度31.1092°,经度114.4733°),与第4组船位置卫星导航RTK基准(经度31.10913375879°,纬度114.47318746719°)相比,误差为13.00 m(=1.26)。
基于试验数据分析可得到以下结论:
(1)在单浮标定位时,不论浮标位置固定或者移动,接收端采用水声测距组合惯导的虚拟长基线定位,均能获得较好的定位精度。发射浮标位置固定仅需要播发一次自身位置数据,而发射浮标位置移动时,则需要在播发测距信息之前先要播发自身位置数据。
(2)在单浮标虚拟长基线定位时,要选择接收点位置分布具有较好几何因子的数据进行结算,这样最终定位结果能获得较高精度。接收点几何因子可以通过反复迭代计算来选择较好几何因子。
4 结语
基于单浮标的水声/惯性组合导航定位方法,利用水下潜航器自身传感器和惯导提供的有一定的精度保证的航向和速度信息,可以提供潜航器短时间内的精确的距离变化值,利用潜航器方位和距离变化值,可以推算出虚拟水声浮标的精确位置,然后利用VLBL单浮标导航定位解算方法,可以保证单浮标定位解算有一定的精度,从而可以校正惯导的位置误差,可长时间提供精确的导航定位信息,保证水下潜航器进行长航时实施水下作战任务。
[1] 孙大军,郑翠娥,钱洪宝,等. 水声定位系统在海洋工程中的应用[J]. 声学技术,2012 31(2):125-132.
[2] 田坦. 水下定位与导航技术[M]. 北京:国防工业出版社,2007.
[3] 张福斌,马朋. 一种基于虚拟移动长基线的多AUV协同导航算法[J]. 鱼雷技术,2013,21(2):115-119.
[4] 张立川,徐德民,刘明雍,等. 基于移动长基线的多 AUV协同导航[J]. 机器人,2009,31(6):581-585.
[5] 刘明雍,李闻白,刘富樯,等. 基于单浮标测距的水下导航系统可观测性分析[J]. 西北工业大学学报,2011,29(1):87-92.
Single-Buoy-Based Underwater Acoustic/Inertial Integrated Navigation Positioning and Experimental Verification
Inertial navigation is at the center of underwater navigation due to its passive and autonomous advantages. However, the error of inertial navigation increases with time, and it is difficult to provide accurate navigation information for a long time. In response to this problem, the paper proposes a single-buoy-based underwater acoustic/inertial integrated navigation and positioning method. With the help of the speed and azimuth information of the underwater submersible, the positions of the actual buoy and three virtual buoys, and the relationship with the underwater submersible, using long baseline navigation to realize the navigation and positioning of the underwater submersible. The test results show that, compared with inertial navigation, this method reduces errors and improves positioning accuracy, and it can ensure that the underwater submarine can carry out underwater combat missions during long voyages.
Underwater Submarine; Single Buoy; Underwater Acoustic Navigation; Inertial Navigation
U666.1
A
1674-7976-(2021)-03-179-05
2021-04-20。程琦(1994.01-),山西运城人,硕士,主要研究方向为水声导航。
猜你喜欢
军民两用技术与产品(2021年7期)2021-10-13 08:12:10
湖北农机化(2020年4期)2020-07-24 09:07:44
测控技术(2018年2期)2018-12-09 09:00:56
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
石油地球物理勘探(2018年6期)2018-03-22 03:05:26
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
湖南大学学报(自然科学版)(2016年5期)2016-08-25 08:19:53
中国惯性技术学报(2015年1期)2015-12-19 13:11:49
应用声学(2015年3期)2015-10-27 02:52:49
计算机工程(2015年4期)2015-07-05 08:28:57