
浅析电动汽车行进中接触式充电装置设计研究
2021-07-26 15:42:28王浩宇
科技与创新 2021年13期
王浩宇
(武汉理工大学汽车工程学院,湖北 武汉 430070)
1 充电系统的总体技术路线
普通公路上嵌着两条凹电轨,电轨与地下电网连接,分为若干段,地下电网又与充电收费站连接。当车辆驶过电轨上方并且电池需要充电时,电源管理系统传递信号给车辆运行状态检测模块,车辆运行状态检测模块通过光电编码器输出计数脉冲实现对方向盘转动角度和角速度的检测,由此判断车辆行驶是否处于平稳状态。当车辆行驶处于平稳状态时,车辆运行状态检测模块发出信号给机械充电臂,安装在电动汽车底部的机械充电臂可以自动检测电轨并与其连接,同时电源管理系统通过车载无线通信系统传递信号给电轨的信号接收模块,信号接收模块发射信号至可控开关使导轨通电。导轨与电网连接,待导轨通电后电流流入机械充电臂,通过稳压装置稳定电压,经电源管理系统监测后进入电池组充电。本文主要探讨电轨和机械臂的结构设计。
2 电轨结构设计方案
2.1 分段式电轨总体结构
导轨分段式结构形式如图1所示。
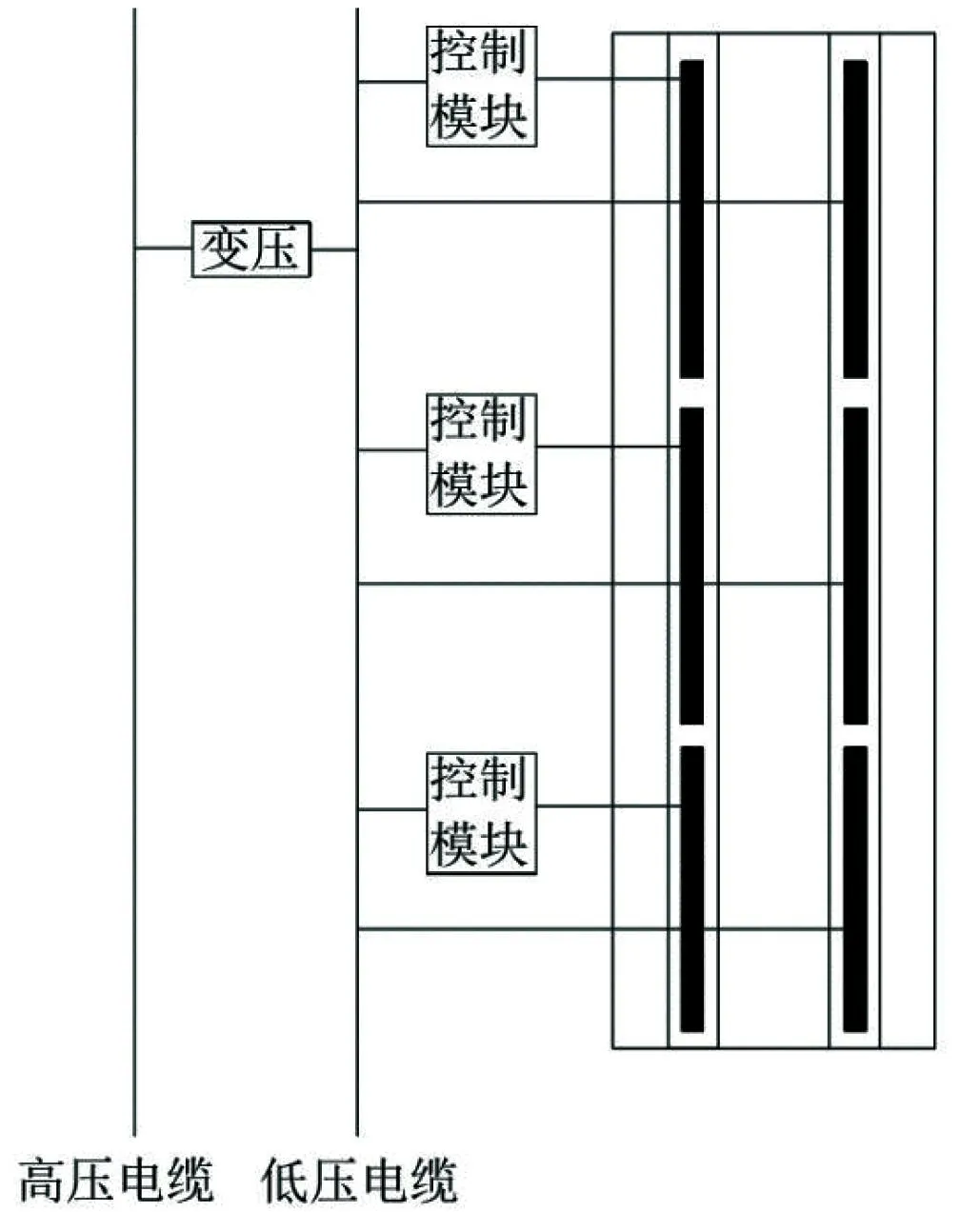
图1 导轨分段式结构示意图
电轨采用分段式铺设,每隔50~100 m电轨为一个管理区间,只有当电动汽车行驶过电轨上时,车载通信系统发出的信号会被电轨接收,电轨才会通电,而电轨之间能够相互响应,在之后的信号传递过程中控制带电导轨区域向前延伸。分段式铺设管理可使路段行车流量较少时减少电能损失,同时也保证了导轨防触电的安全性。
采用并联高压电缆从电网中取电,降低输电的损耗,并且单根电缆损坏也不影响使用,增强了装置的可靠性。高压电缆的高压电经隔离变压器降压后将电能传输到低压电缆,再经整流滤波电路和稳压电路产生稳定的高品质电流分别导通到各段导轨上。每段电轨各自配备控制模块,包括可控开关、通信模块、检测保护模块等。
2.2 导轨结构设计
导轨整体外形采用工字形结构,整个结构分为上下两层,上层放置输电部分,下层为排水层,两者通过导流孔连通。排水层与道路排水系统相连,当雨水量较大时也没有浸没危险,装置可以安全运行。
正负极触点平置在有绝缘层的基座上,高压电经降压后传递至低压电缆,再经整流滤波以及稳压后分别传递至各段导轨的正负极触点上。正负极触点采用380 V直流供电,触点下表面以及导轨表面绝缘保护,同时车辆通过时才通电。只要不在车辆驶过时同时接触到正负极触点就没有触电危险。同时通过中间结构将正负极分隔开,避免两级直接或间接接触产生短路危险。导轨具体结构横截面如图2所示。
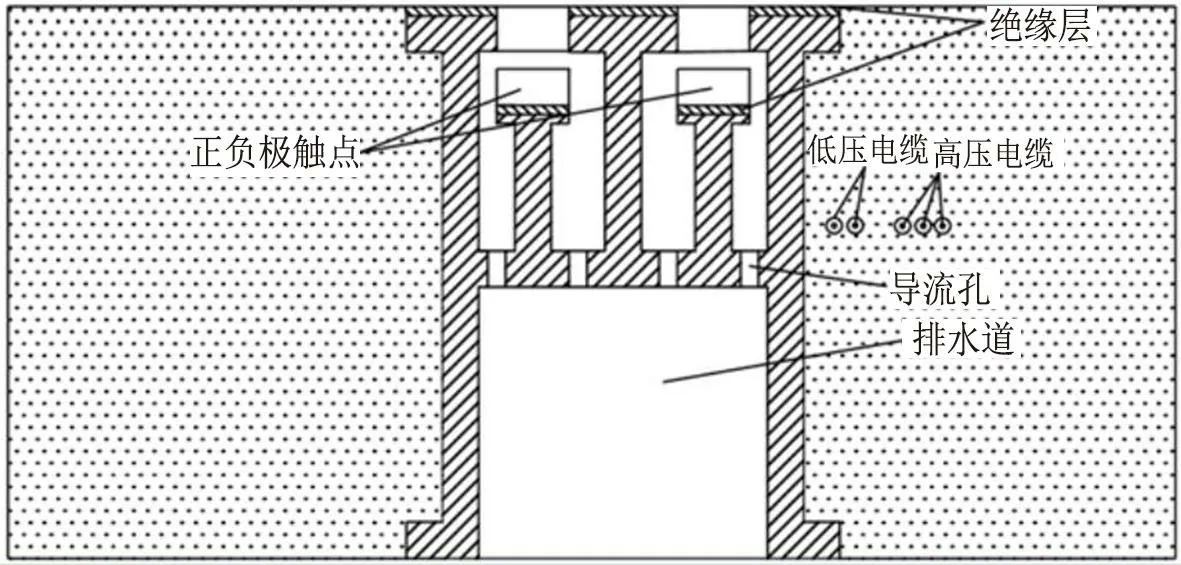
图2 导轨具体结构横截面示意图
3 机械臂结构设计
机械臂结构如图3所示。

图3 机械臂结构示意图
机械臂主要由顶板、步进电机、柔索和弹簧、上臂杆、下臂杆、导轨、电刷组成。上臂杆、下臂杆和其之间的转动副控制机械臂进行上下主动适应工况,导轨和电刷获取传感器传递的信息后,通过其上的执行机构进行主动控制与电轨对齐,导轨和电刷中的转动副在汽车稳定后完成左右方向的被动适应。
3.1 上臂杆和下臂杆
上臂杆固定在顶板中,与下臂杆通过一转动副相连,下臂杆前端通过柔索连接至顶板上的步进电机,后端通过弹簧连接至上臂杆上的步进电机。整体通过中间的转动副形成杠杆结构,实现下放和回收。顶板安装在汽车底部,用于固定机械臂装置。
3.2 下放和回收过程
下放过程通过视觉传感器和电刷转动副上的传感器,感知电刷相对于导轨和电轨的具体位置和角度位置等信息。通过驱动转动轴使电刷轴线与导轨平行;驱动导轨使电刷轴线和导轨水平方向重合,对齐电刷后,首先驱动步进电机缓慢张紧弹簧、放松柔索,当电刷下放到离地高10 cm处停止;驱动转动轴和导轨执行结构使电刷运动到导轨的正上方后快速驱动步进电机,将电刷插入电轨中,完成机械臂的下放过程。在机械臂回收过程中,驱动步进电机快速运动,张紧柔索、放松弹簧,抬起机械臂离开导轨。之后再缓慢驱动步进电机抬升基架,同时驱动导轨和转动轴的执行结构使电刷回到与汽车轴线重合的位置。
3.3 上下方向振动控制过程
机械臂结构控制上下振动过程如图4所示。
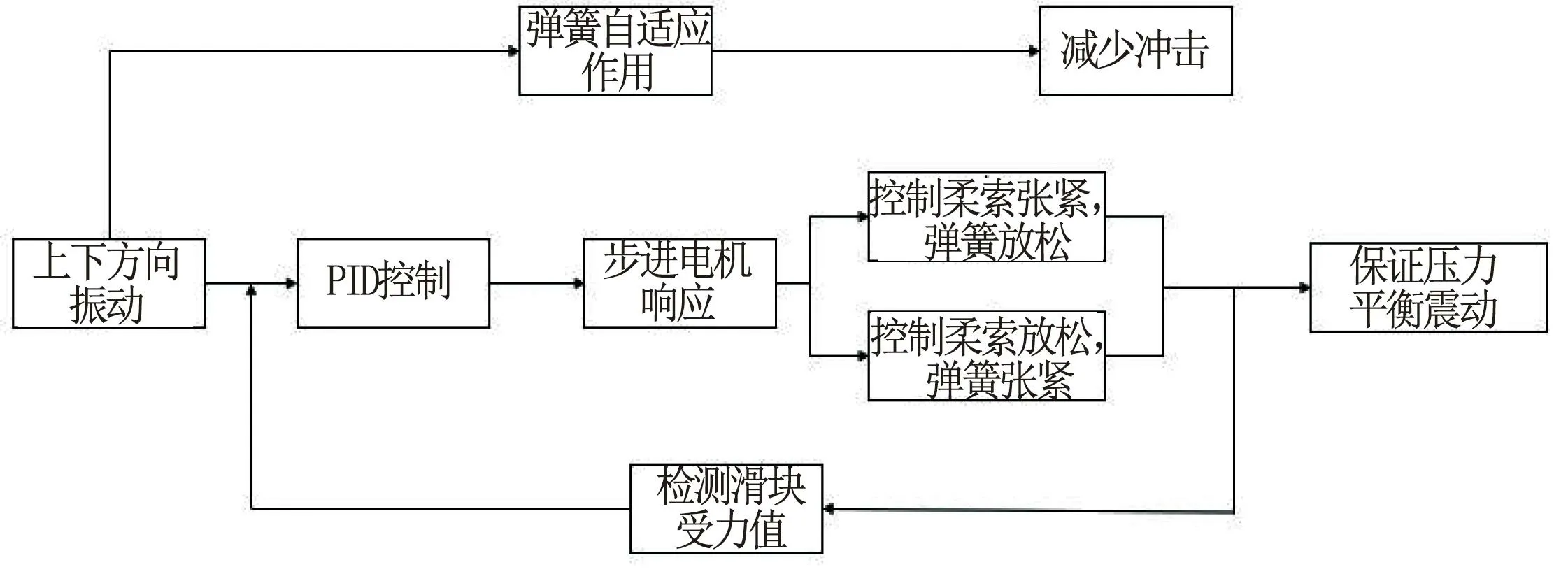
图4 机械臂适应上下振动过程示意图
完成下放过程后,充电臂通过主动控制适应悬架上下方向振动,为避免电刷与电轨的接触过程中发生接触不良产生电弧等危险,需要在电刷和电轨之间持续保证至少20 N的压力。此过程利用PID控制,碳滑板受力和弹簧及柔索拉伸状态有关,根据受力调整步进电机,从而调整弹簧和柔索的张紧程度,同时弹簧有减震作用,能够减少机械臂所受到的冲击。
通过构建汽车行驶振动模型,利用MATLAB分析系统的稳定性,得到系统的Pole-Zero图,通过判断特征函数右半S平面零点数目、开环函数的极点数目和Nyquist图逆时针绕(﹣1,j0)的圈数,经过训练得到PID控制系统所需要的3个参数,能够使响应速度明显加快。
3.4 左右偏移的控制和适应
由于充电臂的适应分为主动控制和被动适应,车体的上下振动由于有一定正压力的要求,使用了主动控制。而车体的左右偏移没有压力要求,左右振动对电刷和导轨的嵌合影响并不大,因此,采用导轨和转动副以满足车体左右偏移的被动适应。其中导轨能够完成被动适应车体相对于电轨20~30 cm的左右偏移(如图5所示),车体轴线角度偏移则由能相对自由运动的旋转轴被动适应(如图6所示)。

图5 机械臂适应左右偏移过程示意图
图6 机械臂适应汽车轴线转动过程示意图
导轨和电刷转动副处通过加装传动执行元件和离合装置,电刷定位时,离合器处于接合状态,以保证导轨下放和回收过程中执行元件能够主动控制电刷滑块相对于汽车轴线的角度和左右位置。完成定位和下放后,通过分离离合装置,使电刷处于自适应状态,保证滑块拥有两个自由度,并随着电轨和汽车的相对位置完成被动适应。
4 总结
利用车道线检测技术和对机械臂的智能控制,完成充电机械臂与电轨的连接,电动汽车实现在行驶中取电,可以设立充电收费站,铺设电网和电轨,与电动汽车形成完善的充电系统,解决电动汽车续航问题。
猜你喜欢
中学化学(2024年2期)2024-06-17 04:01:47
数学大王·趣味逻辑(2023年5期)2023-05-15 09:17:51
北京航空航天大学学报(2022年5期)2022-06-06 09:26:42
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26 13:41:28
中国特种设备安全(2019年7期)2019-09-10 07:30:42
电镀与环保(2018年1期)2018-04-04 05:21:18
新能源科技(2018年10期)2018-02-15 20:23:20
电镀与环保(2016年3期)2017-01-20 08:15:28
电源技术(2016年2期)2016-02-27 09:04:55
制造技术与机床(2015年10期)2015-04-09 07:05:58
