
PID控制在不压井作业机举升液压控制系统上的应用
2021-07-25 05:30陈欢朱凯辉
科技创新导报 2021年6期
关键词:管柱
陈欢 朱凯辉


摘 要:举升液压控制系统是不压井作业机液压控制系统的关键控制环节,决定着作业机的作业效率。在一般工程应用中,举升控制存在着控制稳定性差,管柱在大负载情况下会产生冲击等现象。本文在电液伺服液压控制的基础上引入闭环PID控制系统,实现了作业过程中对管柱位置的实时控制,同时也降低了管柱的冲击、震动现象。
关键词:不压井作业机 液压控制系统 PID 管柱
中图分类号:TH137 文献标识码:A 文章编号:1674-098X(2021)02(c)-0070-04
The Application of PID Control in the Lifting Hydraulic Control System of Snubbing Operation Machine
CHEN Huan* ZHU Kaihui
(School of Mechanical Engineering, Yangtze University, Jingzhou, Hubei Province,434023 China)
Abstract: The lifting hydraulic control system is the key control link of the hydraulic control system of the snubbing operation machine, which determines the operation efficiency of the operation machine. In general engineering applications, the lift control has poor control stability, and the pipe string will produce shocks under heavy loads. In this paper, a closed-loop PID control system is introduced on the basis of electro-hydraulic servo-hydraulic control, which realizes real-time control of the position of the pipe string during operation, and also reduces the impact and vibration of the pipe string.
Key Words: Snubbing operation machine; Hydraulic control system; PID; Pipe string
不压井作业技术是一项能够在工程作业过程中保护油、气产层的同时提高油、气生产效率的新技术,被广泛运用于石油行业中,因此,优化提升不压井作业机液压控制系统成为当前的一项重要技术难关[1]。针对当前不压井作业机举升液压控制系统存在的管线抖动,控制系统不稳定等現象,采用PID控制接入电液比例伺服控制系统中使系统实现闭环控制。液压控制系统能实时调控管柱的位置、起升下放的速度、加速度,减小大载荷下管柱产生的抖动。该控制系统具有操作简单、可靠性高、工作效率高、稳定性高等优点,对不压井作业机的举升液压控制系统的研究具有重大意义[2]。
1 新型不压井作业机
1.1 新型不压井作业机举升系统结构
如图1,新型不压井作业机举升液压控制系统主要由举升机、转盘、固定卡瓦、游动承重卡瓦、游动防顶卡瓦、旋转卡瓦、底座及支撑架构成。举升机带转盘、游动承重卡瓦、游动防顶卡瓦(如有需要)一起上行、下行。转盘位于移动面板上部,与移动承重卡瓦和移动防顶卡瓦相连,转盘在旋转过程中可以承受载荷,一般采用液压马达驱动,齿轮传动或链条传动。固定卡瓦安装在支撑架上,一般有2个或者3个,用于卡紧管柱。游动卡瓦有2个,包括移动承重卡瓦和移动防顶卡瓦,用于起下油管。旋转卡瓦主要是在管柱下放过程中配合管柱实现管柱的旋转[3]。
1.2 举升系统工作原理
不压井作业机的作业工况主要分为管柱起升和管柱下放两种工况。管柱起升作业前,举升机液缸处于压缩状态,固定卡瓦卡紧管柱。开始起升作业时,即当油管全部位于井筒中时,油管竖直方向的合力向下处于“管重的“状态。随着管柱的起升,油管竖直方向向下的合力逐渐减小最终变为0,此时油管受力达到静平衡状态。再对油管进行起升作业时,油管所受的合力向上,处于”管轻“状态。以油管上行为例讲述起升液压控制系统的工作原理。管柱起升作业前,起升液压控制系统的油缸处于低位压缩状态,固定卡瓦卡紧管柱。起升作业时,下端固定卡瓦松开,游动卡瓦抱紧管柱。通过操作平台的控制面板对起升液压控制系统的三位四通电磁换向阀输入控制信号,电磁铁将阀芯吸到左位,左位通电,换向阀执行左位机能,液压油压入油缸无杆腔,活塞上行驱动举升机上行。举升机带动游动卡瓦卡住油管上行,使油管上行。当控制系统的传感器检测到接箍信号时,反馈信号使换向阀断电切换到中位,执行0位机能,断开供油回路。待接箍头通过,换向阀左位通电使得管柱继续上行,当达到PID期望信号时,即活塞达到指定位移,游动卡瓦松开,上端固定卡瓦抱紧管柱,控制信号让换向阀执行右位机能,此时液压缸空载回复,恢复至压缩低位,重复之前操作,直到完成一根油管的起升[4-6]。
2 PID位置控制
PID是比例、积分、微分控制的简称,通过比例、积分的环节的调控控制油缸速度,并对控制对象的结果作一个负反馈。整个控制流程是PID控制函数与被控对象油缸的传递函数、一个负反馈结合完成的,保证控制对象的传递函数与负反馈结合的闭环系统能够在最短的时间内达到给定的期望[7]。
3 AMEsim仿真
3.1 仿真参数与建模
如表1所示。
3.2 仿真结果分析
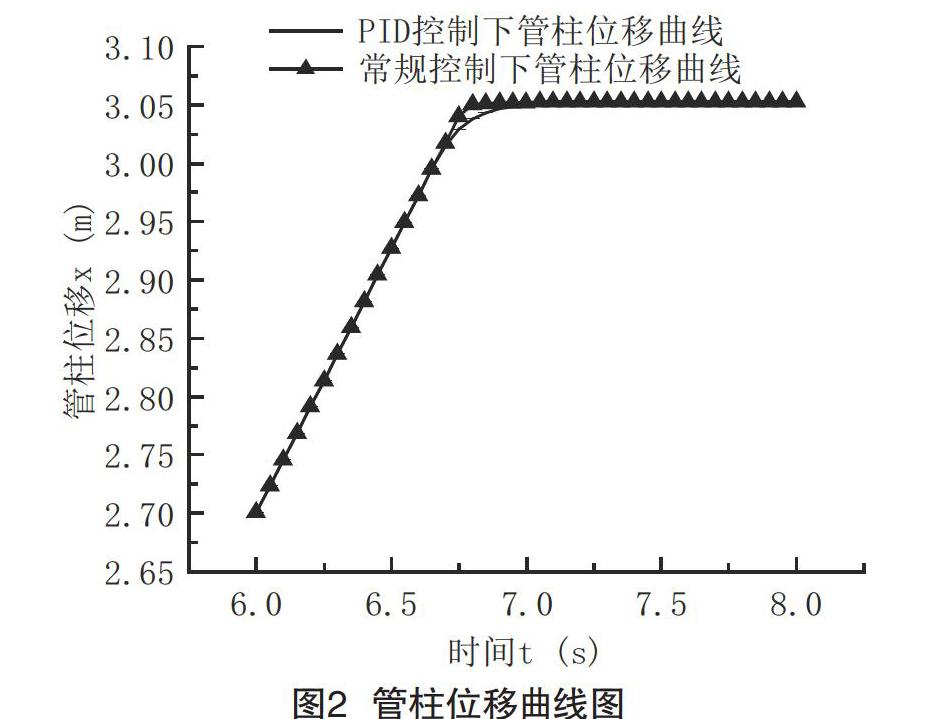
通过图2和图3管柱提升曲线中,我们可知PID控制能够实时调控管柱的速度、位移。开环控制下管柱位移曲线表现为匀速直线上升,速度曲线表现为加速、匀速、减速,在接近3.05m处管柱速度会产生波动,即有明显的冲击现象。在PID闭环控制系统中,管柱在接近3.05m处会有一段缓慢的减速过程,降低管柱所产生的震动,提升了管柱运动的平稳性。
通过图4和图5的油缸进口压力、流量曲线,更好地反映出闭环PID控制与传统开环控制的区别。开环控制下油缸进口的油压在到达油缸行程终点时,油缸内的压力会急剧上升,不具备回油功能,油缸进油口流量会产生不稳定波动。而闭环PID控制下,油缸具备较好的回油功能,压力到达2.5MPa后降低至初始压力,且流量曲线呈匀速下降,无波动现象。
4 结语
(1)提供了一种新型不压井作业机起升液压控制系统的设计方法。
(2)在PID闭环控制方法下,油缸压力减小,管柱运动起点与终点的位置得到实时的控制,显著减小了举升液压控制系統在工程作业过程中所遇到的管柱震动、冲击现象。降低了事故发生的概率,对不压井作业机的起升控制系统的研究具有指导意义。
参考文献
[1] 梅雪松.基于PLC的不压井作业机液压控制系统特性研究[D].荆州:长江大学,2018.
[2] 罗娜娜.基于非线性PID控制的挖掘机液压系统稳定性研究[J].中国工程机械学报,2019,17(4):367-370.
[3] 孙新.节能型起升机构闭式液压系统研究[D].大连:大连理工大学,2019.
[4] 于大伟.新型独立式带压作业设备的研发与应用[J].油气开发工程,2017,45(5):103-106.
[5] 邾启孟.新型带压作业设备平衡绞车研制与应用[J].装备制造技术,2016(9):101-114.
[6] 刘涛.不压井修井机控制[D].成都:西南石油大学,2012.
[7] 吕卫强.液压缸位置伺服系统模糊PID控制[J].兵工自动化,2020,39(9):41-44.
猜你喜欢
云南化工(2021年8期)2021-12-21
中国煤层气(2021年5期)2021-03-02
承德石油高等专科学校学报(2019年2期)2019-06-03
中国特种设备安全(2019年1期)2019-03-13
分析化学(2017年12期)2017-12-25
西南石油大学学报(自然科学版)(2015年5期)2015-04-16
