
倾斜摄影在南水北调三维实景建模中的应用
2021-07-25 10:00:42郭向前郝伟涛曹继如
地理空间信息 2021年7期
郭向前,郝伟涛,米 川,曹继如
(1.河南省地质矿产勘查开发局测绘地理信息院,河南 郑州 450006;2.河南省地质勘查信息化工程技术研究中心,河南 郑州 450006)
南水北调中线全线三维实景建模项目是一项重大的水利工程项目,跨越河南、河北、北京、天津,总干渠全长1 432 km。该项目是对中线工程的主干渠道、左排建筑物以及上游河流进行全线无人机倾斜摄影测量,全面真实地采集中线工程沿线地形地物现状;并利用无人机航测技术,结合三维实景建模技术,构建全线三维实景模型。该项目三维实景建模面积约为3 042.1 km2。本文选取河南省禹州市南水北调渠道部分段作为试飞区,试飞区内渠道长约为16 km,测区面积约为46 km2。
1 三维实景建模数据成果要求
1.1 空间精度
检查点平面位置误差不大于0.1 m;高程中误差不大于0.2 m,丘陵或山地高程中误差不大于0.5 m。拍照死角、隐蔽、暗影等特殊困难地块的中误差可适当放宽0.5倍[1]。
1.2 纹理精度
没有被掩藏的构筑物楼体应外形清晰、轮廓光滑;立交桥不论侧面还是正面纹路都理当达到持续不拉花、外表面光滑清晰的要求;道路应消除运动车辆对纹理的影响,使道路纹路、中线和边线能匀称、持续、合理的表示[2]。
1.3 其他精度要求
在不影响整体三维实景建模数据使用的情况下,数据在一些细节表现方面稍有不敷,主要影响为:①水面为弱纹路区,其范围内允许出现为数不多的三维实景建模数据裂缝,但应采取一些技术措施在三维平台应用中进行增补;②电杆、女儿墙、塔吊、高压线塔、展牌等支架细小的物体以及路灯等边沿地区的像素较少,无法正确匹配点云,允许有较少部分的三维实景建模数据表述不全[3];③道路上运动的车辆以及构筑物立面大块玻璃区域反光等情况对TIN网的组成有一定影响,允许该类区域的概况模型有极少数的起伏现象。
2 设计路线
固定翼(旋翼)+五镜头的作业方式首先需进行测区踏勘,一般是通过获取测量区域已有的图件资料了解测区的整体情况;再进行航线优化设计。航飞之前需布设像控点并进行有效测量,倾斜摄影测量完成后,利用POS数据、像控成果对原始倾斜影像进行精确的空中加密;再基于空三加密成果,生成倾斜模型成果。
3 航线规划
三维实景建模数据采集的航飞线路采用专业航线设计软件来设计,地面分辨率、航高和物理像元尺寸满足三角比例关系。由于需自动化生产倾斜三维模型,其重叠度需高于规范要求,因此设置旁向重叠度不低于65%,航向重叠度不低于70%[4]。航线设计软件会生成一个飞行计划文件,包含飞机的航线坐标以及各个相机的曝光点坐标位置。实际飞行中,各相机根据对应的曝光点坐标会自动进行曝光拍摄。
1)飞行区域绘制。确定航摄区域后接通飞行器电源,在飞控软件中连接飞行器,规划飞行任务,并绘制飞行区域。
2)飞行安全分析。绘制飞行区域后,在Google地图上检查该区域内各部分的相对位置和高程差,分析计划飞行区域的安全性;然后进行现场勘踏调查,寻找适合飞机起降的地点。确定飞行高度时,应注意航线区域是否有不安全因素,如高山、高楼、高压电塔等[5]。
3)飞行参数设置。根据项目精度要求、飞行区域大小、飞行环境允许的飞行高度等来设置飞行高度、飞行速度、航向重叠度、旁向重叠度等参数。
4 采集流程
真三维模型的制作采用Context Capture Center软件自动建模系统完成。根据摄影测量原理,该系统首先获取大重叠度的倾斜影像,再进行空三加密、多视影像密集匹配和纹理映射等处理,最后生成真三维模型[6]。建模过程完全无需人工干预,由Context Capture Center软件自动建模系统自行处理,其能处理的数据类型广泛,输出格式多样,具有简单、快速、全自动等特点。模型成果中所有建筑物的纹理和空间关系均采用分层显示技术,为了充分详细地表达建筑物的细部特征,且在常规计算机上也能流畅显示,一般分层在20层以上。
将利用倾斜摄影技术获取的影像数据导入Context Capture Center软件自动建模系统进行批处理,只需人工参与三维模型编辑修饰、对模型的质量进行控制等工作即可。具体流程如图1所示。

图1 三维建模数据生产作业流程图
4.1 像控点布设与测量
项目共布设约60个像控点,可根据分块情况进行调整,根据航飞进度提前布设即可。
4.1.1 像控点布设
由于倾斜摄影数据含有IMU/GPS资料,且航向、旁向重叠度均为65%以上,考虑到测区地形因素,项目采用稀疏布点的方式。像控点布设位置如图2所示。
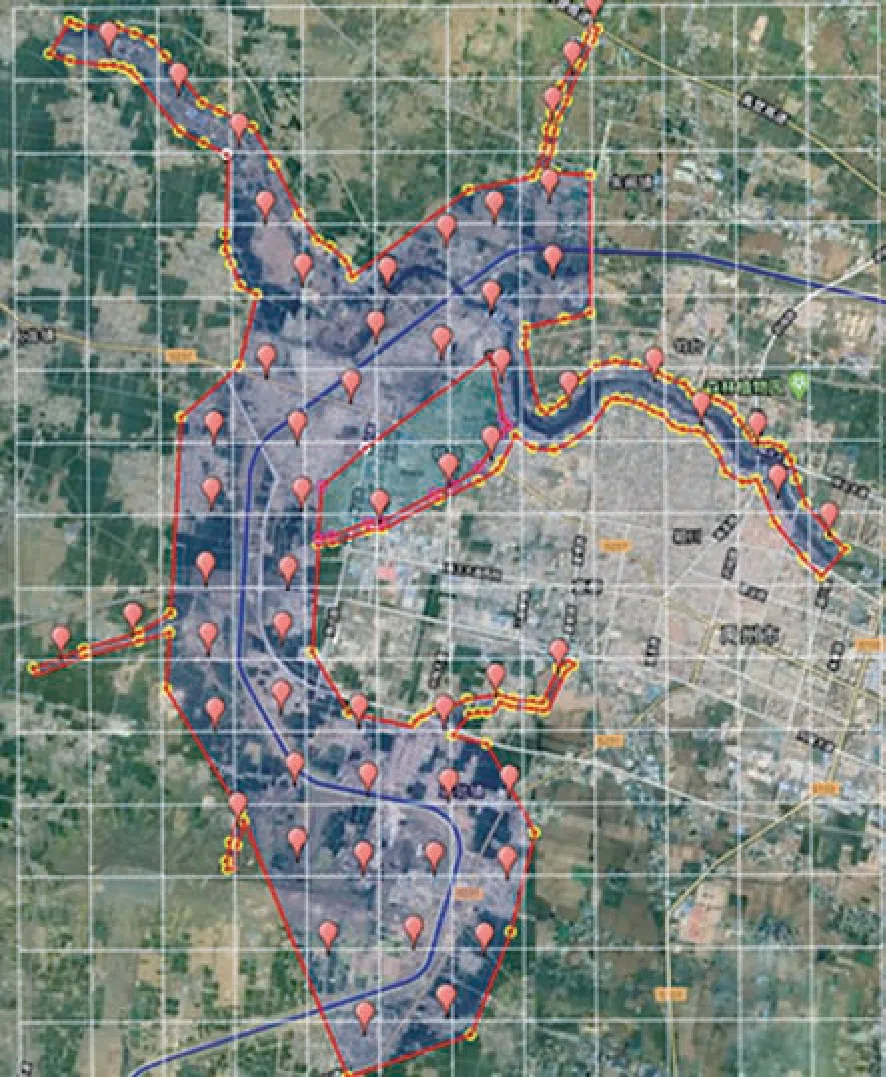
图2 像控点布设点位略图
4.1.2 像控点测量
1)精度要求。像控点的平面和高程中误差均不超过5 cm。
2)像控点选择。应选择影像能清晰辨认、没有遮挡的明显特征地物,相交角度好的线状特征地物的交点以及明显特征地物的拐角顶点,如目标清晰的硬化道路的交角、路上的实线和斑马线的角、大门顶盖角、平屋顶房子的房角、篮球场的实线角、门墩的顶角以及其他便于量高、测距的墩台、柱的顶部拐角等,或者硬化地面刷油漆、土地撒石灰等做出便于识别的“十”字形或“L”字形测量标识。
3)像控点测量。由于测区范围内河南省CORS和千寻基站信号均可覆盖,且精度满足倾斜摄影测量的要求,因此像控点可基于河南省CORS和千寻基站根据甲方控制点求得参数后直接获取。每点采集3次取均值。
4)像控点整饰。采用电子档整饰,全部在原始影像数据上进行。利用Photoshop软件在相片数据上添加整饰信息,整饰后的文件以像控点名为文件名保存。外业可拍现场照片,辅助内业快速判点。
5)成果整理。像控点坐标成果表采用Excel软件制作,并按控制点点号的优先级进行排序。表格数据文件字段顺序和名称为:点号、N、E、H、备注。
4.2 航飞倾斜数据采集
1)外业航飞。外业航飞的环境条件为:天气晴朗、无风或微风,空气通透度良好,起飞场地周围空旷,尽量在9:00—15:00作业。可根据地理位置、季节、天气、工期等调整作业时间段。
2)倾斜数据采集。根据区域航拍计划,找到合适的起飞点,对各区域进行拍摄。检查设备无误后,确认起飞的安全区域和安全高度,开启无人机起飞。起飞时,飞控手通过遥控器实时控制飞机,地面站飞控人员通过飞机传输回来的参数实时观察飞机的飞行状态。飞机到达安全高度后由飞控手通过遥控器收起起落架,将飞行模式切换为自动任务飞行模式。为了保证无人机的飞行安全,飞控人员要注意飞行速度、姿态和高度,以及飞控软件中显示的电池状况、航线完成情况等。飞行任务完成后,无人机降落时应确保降落地点的安全,避开障碍物和路人。无人机着陆后,检查摄像机中的图像数据和飞控系统中的POS数据是否完整。
3)数据质量检查。数据采集完成后,对采集的影像进行检查,对不合格区域进行补测,直到影像质量符合要求为止。针对无法旋转镜头拍摄的建筑和地面死角,采用灵活、易用的大疆精灵4专业版补拍建筑侧面信息,从而进一步提高模型质量。
4.3 自动化空三加密
Context Capture Center软件自动建模系统加载所拍摄的测区影像时,只需人工设定控制点的数量,系统就会自动采用光束法对整个测区进行区域网整体平差。一个平差单元就是一张相片组成的一束光线,平差单元的基础方程就是中心投影的共线方程[7]。在空间对各光线束进行平移和旋转,使模型之间的公共光线实现最佳交会,将整个拍摄区域嵌入到控制点坐标系中,从而恢复地物间的空间位置关系[8]。
4.4 影像处理
1)影像密集匹配。密集匹配技术是利用二维影像恢复三维信息的关键技术之一[9]。Context Capture Center软件自动建模系统根据高精度的影像匹配算法,自动寻找所有影像中的同名像点进行匹配,并从影像中尽可能多地抽取特征点,形成密集点云,从而表达出更准确的地物细节[10]。越复杂的地物,越密集的建筑物,点密集程度就越高;反之,则相对稀疏。
2)纹理映射。根据影像密集匹配的结果,影像之间的三角关系由空三加密构成TIN,再由TIN形成白模。软件从影像中计算相应的纹理,并自动将纹理映射到相应的白模上,最终形成一个真实的三维场景[11]。
3)三维成果修改。对模型进行检测,反复处理明显纹路缺陷、模糊图和拉伸变形等现象,直至其精度满足真实三维建模的设计要求为止。
4)三维成果输出。利用该系统输出需要格式的三维成果。
4.5 数字高程模型制作
4.5.1 制作流程
利用软件自动生成的DSM数据进行自动滤波、人工编辑、数据内插、接边分幅,进而生成满足1∶1 000 DOM精度要求的DEM成果,DEM为生产DOM的过程产品。DEM制作流程如图3所示。

图3 DEM制作流程图
4.5.2 作业方法
1)自动滤波。利用软件对生成的DSM数据进行自动滤波,去除建筑物、植被、电力设施及其附属物等地物数据,保留地表模型数据。
2)人工编辑。由于自动滤波算法难免会有误差,因此需人工干预对数据进行遍历,修改模型上的错误。
3)DEM数据接边分幅。对分块的DEM数据进行拼接,再按照1∶1 000比例尺对其进行分幅。
4)DEM数据检查、修改。对分幅后的1∶1 000 DEM数据进行检查,对不满足数据要求的进行人工修改,直至满足1∶1 000 DOM成果要求为止。
4.6 倾斜模型生产
空中加密采用Context Capture软件进行多视影像联合平差。多视影像联合平差需充分考虑影像的几何变形和遮挡关系[12]。结合定位元素POS系统提供的多视影像外方位元素,采用从粗到精的金字塔匹配策略,自动在每级影像上进行同名点匹配和自由网光束法平差,可得到较好的同名点匹配结果[13]。同时,建立了多视点图像自标定区域网平差的误差方程,并加入像控点坐标、连接点、连接线、GPU/IMU等辅助数据,通过联合计算保证了平差结果的精度[14]。具体流程为:①配置集群运算环境;②像控点刺点和设置空中加密参数;③三维模型构建。
基于Context Capture软件,项目采用全自动化的生产模式算法生成基于影像的超高密度点云,再利用超高密度点云构建TIN模型,最终生成基于影像纹理的高分辨率倾斜摄影三维模型。三维模型样例如图4所示。

图4 局部三维模型
5 结 语
随着无人机技术的创新与发展以及无人机的普及,近年来无人机倾斜摄影技术受到了越来越多的关注。无人机倾斜摄影技术可有效降低城市三维建模成本、快速获取城市的完整基础信息,还可以无人机倾斜摄影数据为基础,快速建立模型库。随着无人机倾斜摄影技术的进一步发展,其在城市建筑监测、城市管理、城市规划等方面的作用将越来越大,可为各行业带来更多的便利。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16 07:51:04
华人时刊(2021年23期)2021-03-08 09:27:24
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:02
电子制作(2018年17期)2018-09-28 01:56:44
通信电源技术(2018年5期)2018-08-23 01:15:36
北方音乐(2017年4期)2017-05-04 03:40:09
旅游纵览(2014年8期)2014-09-10 07:22:44
焦点(2014年3期)2014-03-11 23:03:43
现代防御技术(2014年6期)2014-02-28 18:26:29
测绘科学与工程(2014年2期)2014-02-27 07:05:50
