
无人机在电厂进站道路改扩建中的应用
2021-07-25 09:59乐志豪姜加喜
地理空间信息 2021年7期
乐志豪,何 强,任 彪,姜加喜
(1.四川电力设计咨询有限责任公司,四川 成都 610041)
道路勘测设计项目的摄影测量手段逐渐从高空到低空,有人到无人,正射到倾斜。小型无人机航测系统在公路勘察设计中得到越来越广泛的应用,随着其成本的下降,较低的投入成本即可自主展开工作,不用再委托专业航测单位,时效性强、自主可控[1]。李德仁[2]等通过描述无人机遥感系统在大量相关行业领域的应用与实践,展望了其应用的广阔前景。勘察设计单位已逐渐从单纯依靠外业人工单点勘测作业模式转变为利用无人机倾斜摄影测量技术进行数据采集。相诗尧[3]等对无人机航测技术在公路各设计阶段中的应用进行了分析。尹恒[4]等介绍了无人机航测技术在带状地形测绘、地灾调查、土方量算和征地纠纷等领域的应用情况。史华林[5]、张浩[6]、魏方震[7]、刘艺[8]等在新建道路勘测中对无人机进行了很好的应用。罗博仁[9]、潘成军[10]等分别在公路改扩建勘测和城市道路现状地形图测绘中进行了实践。周冰[11]等将无人机系统应用于电厂地形图测量中,并进行了精度分析。然而,利用无人机对电厂进站道路进行测绘的应用却为数不多。
目前,电厂进站道路的常规测绘方法难以满足精细化设计要求,传统摄影测量技术在公路项目测绘中的应用周期较长、成本较高。电厂进站道路改扩建项目一般规模较小,而小型无人机使用成本低、结构简单、操作方便、效率较高,非常适合该类项目。电厂进站道路的改扩建设计涉及桥梁、涵洞加固,道路拓宽,线路、房屋迁改等工作,通过实景三维建模对现场的高边坡、高填挖方路段,重要交叉跨越设计路段,拆迁房屋路段等重点区域进行直观形象的展示,能保证设计方案的合理性和有效性。本文在公司总承包的贞丰电厂进站道路改扩建测绘中,利用小型无人机倾斜摄影测量技术对进站道路的改扩建进行了实验,验证了无人机的灵活性和实效性。该方法有利于提高生产效率,实现了精准设计的目的。
1 项目实施
1.1 工程概况
项目全长2 km,带状宽度约为300 m,测区概况如图1所示。根据设计要求,需要提供项目测区内1∶500带状地形图(沿黄色中线两侧各150 m范围)。

图1 测区概况图
1.2 项目关键技术流程
项目采用大疆精灵4 Phantom4 Advanced旋翼无人机完成航摄影像数据的获取。项目作业流程如图2所示。
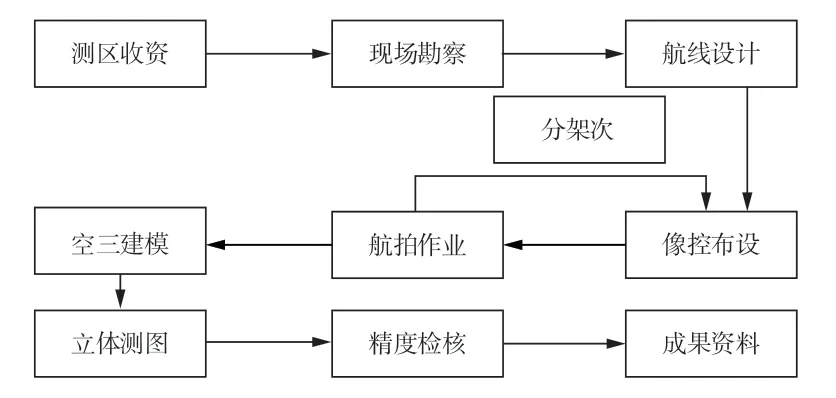
图2 项目作业流程图
1)航测设计。根据收资和测区现场踏勘掌握的实地情况、成图要求以及测区地形起伏状况,避开在建电厂烟囱、电塔以及其他重要影响飞行安全的地物,结合所用旋翼无人机的特点,项目设计了5个正射航摄架次和6个倾斜航摄架次。平均每架次的拍摄区域约为500 m×300 m,每架次航拍按道路走向约重叠100 m,航高设置约为80 m。若测区地形复杂、起伏不均匀,可适当增加倾斜摄影的架次。
2)像控点布设。根据条带状测区特点,为了更好地获得测区高精度的影像数据,项目沿着已有公路两侧分架次均匀布设像控点,点之间平均间距约为100 m,每架次保证5~6个像控点,每架次航拍重叠区域保证有两个共同像控点。像控点的坐标系统采用电厂的统一坐标系,利用GPS-RTK 测量,测量精度要求为2 cm。航测设计和像控点布设情况如图3所示。

图3 航测设计和像控点布设示意图
3)航线规划与数据采集。导入测区KML文件,利用飞行控制软件规划航线,航向重叠度为80%,旁向重叠度为65%,飞控软件按预设的航线和拍摄参数控制相机进行拍摄。对于坡度大、地形复杂的区域,为提高相片的重叠率可手动控制飞行遥控器适当加拍相片。项目共获取正射影像727张、倾斜影像1 147张。
4)航测内业处理。航测内业处理主要包括刺点、空三加密、图像匹配、平差和三维产品制作。项目同时导入正射和倾斜摄影多个架次获得的照片,合并后进行处理。首先通过图像匹配对连接点进行平差,修正摄像点的相对位置;再进行刺点工作,以确定照片物理要素的精确坐标;最后输出正射影像图、数字表面模型和点云数据等三维产品。项目主要采用相关三维建模和立体测图软件实现,结果如图4所示。

图4 实景三维模型和正射影像
在电厂道路改扩建测绘中,为满足大件运输要求,需对沿线交叉跨越路段进行更加精细的设计。实景三维模型具有纹理清晰、直观形象、精度较高、可量测的优势,可查看与设计方案密切相关的周边环境情况,实现更好的匹配和融合。如图5所示,在电厂主水管道施工区域,水管穿越已有公路。现有道路与重要房屋的位置关系如图6所示。若采用传统线划地形图,几乎很难直观展示房屋材质、楼层、大小等内容;而采用无人机航测技术制作的三维模型能对重要交叉跨越路段、房屋主要区域等重点地段重点关注,有利于最终实现精准设计。

图5 实景三维模型截图(跨越主水管道)

图6 实景三维模型截图(道路与房屋关系)
2 精度检查与分析
2.1 检查点位选择
对于未被遮挡区域,地物的平面精度评定应选取明显的易判读实测的点位,地形点的高程精度评定应尽量选择已有公路上分布均匀的点位,项目选取了易辨别且分布较均匀的47个地物点和66个地形点;对于被植物和树木遮挡区域,项目选取已有公路两侧均匀分布的118个点位。全部检查点分布情况如图7中白色点所示。项目利用GNSS方法进行地形图的外业精度检查,并利用徕卡GS16仪器进行RTK测定检核。

图7 实验检查点位选取情况
2.2 检查点的精度计算
在检测地物平面和地形点的高程精度时,地形点的高程精度评定利用未被遮挡的检查点共同计算。检测中误差的计算公式为:
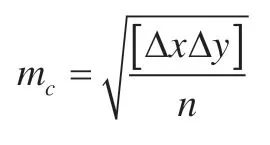
结果如表1所示,可以看出,利用未被遮挡检查点进行检测的地物点的点位中误差为0.12 mm,高程检测点的点位中误差为0.07 m,均小于GB 50167-2014《工程摄影测量规范》[12]和DL/T 5138-2014《电力工程数字摄影测量规程》[13]中对一般地区规定的平面0.6 mm、高程0.33hd为0.33 m(hd为地形图基本等高距)的要求;而被遮挡的检查点的高程中误差达到了5 m,不符合规范精度要求。
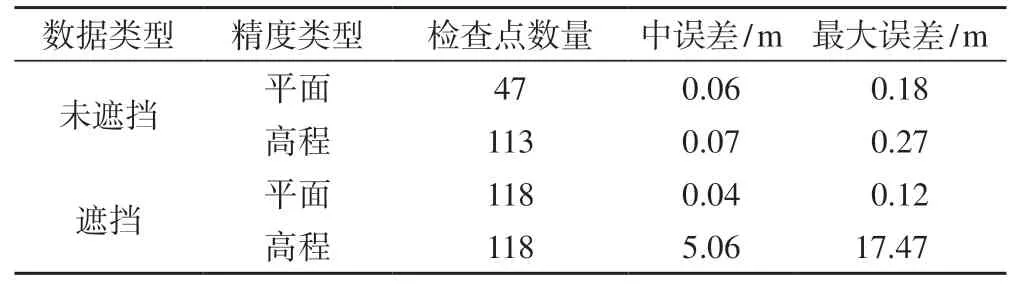
表1 地形图精度统计
2.3 检查点的精度分析
进一步对遮挡检查点平面和高程误差进行统计分析,结果如图8所示,可以看出,检查点的平面误差较小,说明RTK实地校测检查点坐标平面精度较好,能很好地反映实地高程与模型高程的较差;区域内有树木遮挡、地表覆盖有较密集植被的地方,除了零星未被遮挡严实漏出地表的模型点外,大部分点位高程误差精度难以满足1∶500测图精度要求。
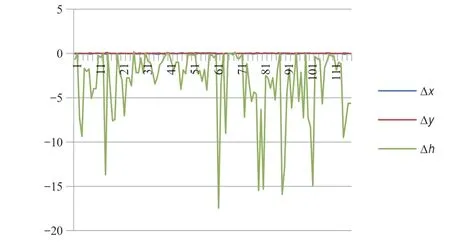
图8 遮挡检查点平面和高程误差统计图
3 结 语
通过项目实践,本文得到以下结论:
1)在电厂道路改扩建设计中应用小型无人机倾斜摄影测量技术测图,可大幅减少外业工作人员数量,提高工作效率和设计时效,有利于实现精准设计。
2)利用旋翼无人机进行带状倾斜摄影时,应注意航测时的架次设计与像控点的布设,保证相邻飞行区域有共同像控点、合理的影像重叠度(航向/旁向重叠率不低于80%/65%)、少量飞行架次和较低的航高(80 m以下),在无遮挡区域能得到很好的成图精度。
3)在植被覆盖较密集区域以及重要交叉跨越线路区域,则需结合传统测量手段进行少量补测和补绘作业。
本文通过在电厂进站道路勘测中进行无人机应用实验,为类似道路改扩建项目测图工作提供了新的解决方案。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
计算机系统应用(2022年4期)2022-05-10
天津医科大学学报(2021年4期)2021-08-21
河北地质(2021年4期)2021-03-08
铁道通信信号(2019年9期)2019-11-25
中国铁道科学(2019年5期)2019-10-19
国际呼吸杂志(2019年4期)2019-03-12
测绘通报(2018年10期)2018-11-02
祖国(2018年6期)2018-06-27
阅读(科学探秘)(2018年8期)2018-05-14
