一种无线多点探测网络和PLC的智慧农业灌溉系统设计方法
2021-07-23 06:04李金铖徐智勇吴晗平
新一代信息技术 2021年2期
李金铖,徐智勇,罗 辉,吴晗平
(1. 武汉工程大学 光电信息与能源工程学院,湖北 武汉 430205;2. 武汉工程大学 光电子系统技术研究所,湖北 武汉 430205)
0 引言
我国是农业大国,农业是国民经济命脉,农业现代化是当今农业的发展方向。灌溉作业是农业生产的基础和关键。而目前大多数农田灌溉都是靠人工操作,导致灌溉效率低下,浪费了大量水资源[1-2]。智能灌溉系统的设计具有重要的实用价值,但目前的智能灌溉系统多基于时间控制,存在水源浪费和浇灌不均等缺点。为了提升效率,降低成本,让灌溉作业走向智能化、高效化、安全化,本文设计基于 PLC(Programmable Logic Controller,可编程逻辑控制器)和无线多点探测网络的智慧农业灌溉控制系统[3-4]。可以实现精准灌溉,提高生产效率,节约水资源。
1 设计思路
构建一个智慧农业灌溉系统,满足农田灌溉基本要求的基础上,提高系统的效率和精度。根据无线液位传感器组成的多点探测网络对水位信息进行采集与反馈。当水位达到恒压水位设定值下限时,系统控制变频水泵电动机开始变速运作,使水位达到预期值;当水位超过预期值时,系统控制水泵电动机停止或降速,来维持农田恒压水位的实现[5]。水泵电机需要变频调节以减少能量的损耗,且恒定水位的调节精度控制在 1~5mm之间。
2 系统构成与工作原理
2.1 系统构成
智慧农业灌溉系统构成图如图1所示。智慧农业灌溉系统由设备执行层及远程监控层组成。设备执行层主要是由无线多点探测网络、变频器、水泵电机、电磁阀、扩展单元等组成通过Modbus总线或Profibus-dp总线连接[6]。远程监控层的建立是通过上位机软件监控整个灌溉流程,便于操作人员对生产灌溉的监测和控制。

图1 智慧农业灌溉系统构成图Fig.1 Composition diagram of smart agricultural irrigation system
2.2 工作原理
智慧农业灌溉系统是以PLC为核心处理器,变频器进行 PID(比例积分微分,Proportion Integration Differentiation)处理运算,无线多点探测网络作为信息采集与反馈器件,继电器与接触器分别作为开关和提供对电路保护,三台电机作为动能装置,最后通过上位机组态进行观测与操控。
2.2.1 控制原理
在系统的控制过程中,无线多点探测网络测量到的实时信号与水位设定值有偏差时,控制系统根据液位变送器传感器得到的信息发送一个电信号到变频器上,变频器将输入的信号进行处理运算在输出一个数字信号,数字信号经过变频器的驱动回路产生一个相应的频率,再通过频率来控制电机的转速实现变频驱动。变频器对电机的控制就是对水泵注水速度的控制使其能够根据不同情况来改变供水量。当水量达到一个程度时,系统会输出一个反馈信号,信号再传递到变频器PID调节器上,经过PID处理运算并输出一定的反馈信号给执行器件,控制电机转速[7]。这样一个闭环调节控制可以维持农田水位在一个恒定的小范围内,最终使水位保持恒定。智慧农业灌溉系统的控制原理图如图2所示。

图2 变频灌溉系统控制原理框图Fig.2 Control principle block diagram of variable frequency irrigation system
2.2.2 变频原理
灌溉系统主要是由PLC作为控制器、变频器作为处理器、水泵电机作为执行器件和无线液位传感器作为信息采集装置组成。变频灌溉系统控制原理框图如图3所示,其中1#为变频电机,2#为工频电机,3#为备用工频电机。

图3 系统控制原理框图Fig.3 System control principle block diagram
农田水位降低至设定值,无线多点探测网络采集信息转换成电信号送入PLC内,通过A/D模块变换成数字信号,再经过变频器的PID计算处理后输出一个控制量,再一次通过D/A转换成电信号来控制变频水泵的转速,进而控制进水量来维持农田水位恒定[8]。此时变频电机变频运转,工频电机停止。
当农田流失水量过大或变频水泵电机达到频率上限,变频电机工频运转并且2#工频电机开始运转,以此维持农田水位。
当农田水位升高并且在水位设定值误差范围内时,工频电机停止运转。而当农田水位大于水位设定值时,无线液位传感器及时将水位信息传达给PLC,经过A/D模块处理成数字信号,再经过变频器内PID调节器,最终控制变频电机变频运转,维持农田水位恒定。
但出于安全防护,3#电机作为一台备用水泵电机,当2#工频水泵电机出现故障时,3#电机马上可以替代运行。
2.2.3 无线传感原理
无线多点探测网络是由大量部署在监测区域内的具有感知、计算和无线通信能力的传感器节点通过自组织方式构成的网络。它综合了微电子技术、嵌入式计算技术、现代网络及无线通信技术、分布式信息处理技术等先进技术,能够根据环境自主完成监测、目标发现、识别与跟踪等任务[9-10]。
本设计采用了无线多点探测网络结构。每一个节点分布在固定的位置,直接向PLC发送信号同时接受来自PLC的查询。是由多个无线液位传感器与数据收发模块构成,多点无线液位传感器对农田液位信息进行收集,经过处理器/储存器运算处理,由无线收发单元进行信息反馈[11]。无线液位传感器网络节点结构图,如图4所示。

图4 无线液位传感器网络节点结构图Fig.4 Wireless liquid level sensor network node structure diagram
3 系统硬件设计
系统硬件设计是智慧农业灌溉系统设计的基础,主要由2个单元组成,包括系统硬件选型和系统主电路设计。硬件选型要求PLC可以高效率处理反馈信息,变频器控制运算灵敏度高。硬件电路系统要求成功实现液位传感器采集水位信息传送给PLC的A/D模块,在变频器中进行处理运算,输出一个变频控制量来控制变频水泵电机的运转速度。
3.1 主要硬件选型
3.1.1 PLC选型
PLC作为核心处理器,其数字输入端外接电路或读入程序,给整个灌溉系统控制启动或停止的命令;输出端输出一组经过处理运算的控制信号到中间继电器或接触器[12]。
目前,可编程序控制器的产品很多,不同厂家生产的PLC以及同一厂家生产的不同型号PLC其结构各不相同,但其基本结构和基本工作原理大致相同。本设计选用台达DVP24ES2-PLC作为系统主要元器件,台达DVP系列PLC具有可靠性高、控制功能强、组成灵活、操作方便等特点,具备较强的环境适应性和较高的抗干扰能力,适合农业灌溉的环境要求。
3.1.2 变频器选型
变频器的作用是将输入变频器的电流进行PID处理运算来改变频率。本系统中输入变频器的是三相交流电,经过变频器处理输出变频的交流电,交流电再经过继电器与接触器传送到变频电机上,随着变频器输出的交流电频率的不同,变频电机的转速也将随之变化,最终实现变频灌溉供水。
选用VFD-PU01变频器与水泵电机相匹配。VFD-PU01变频器采用交-直-交变频变压方式,变频调速很容易实现电机的正反转。VFD-PU01变频器具备节能的优点,节电率可以达到25%-70%,控制精度可达0.5 mm。图5为VFD-PU01变频器控制电路的控制框图。

图5 VFD-PU01变频器控制电路控制框图Fig.5 Control block diagram of VFD-PU01 inverter control circuit
3.2 主电路设计
智慧农业灌溉系统的主电路主要由DVP24ES2-PLC,06XA-E2型号A/D模块,VFD-PU01变频器和无线多点探测网络构成,如图6所示。

图6 智慧农业灌溉系统主电路图Fig.6 Main circuit diagram of smart agricultural irrigation system
DVP24ES2-PLC通过程序控制输出脉冲,在经过继电器和接触器的保护下连接到电机和变频器上,变频器再连接变频电机对其进行变频控制,A/D模块主要用于接收液位传感器传导的信号。在经过变换传送到 VFD变频器内进而通过改变频率来改变变频电动机的转速。变频器控制变频电机的电路图如图7所示。
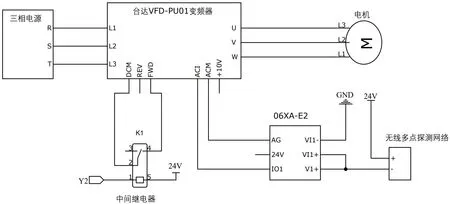
图7 变频器控制变频电机电路图Fig.7 Inverter control variable frequency motor circuit diagram
L1、L2、L3 为三相电源接口;中间继电器为三台水泵提供热过载保护;交流接触器则是起到开关作用,控制电路通断来控制电机的启停。
4 系统软件设计
灌溉系统的软件设计是智慧农业灌溉的功能主体,主要包括系统程序流程和梯形图程序设计。要求确定系统的运行逻辑以及完善的梯形图程序,来确保智慧农业灌溉系统的功能要求得到实现。软件设计程序流程图如图8所示。

图8 软件设计程序流程图Fig.8 Software design program flow chart
本研究中变频恒压水位系统有两种控制方式,一种是手动控制,另一种是自动控制。
4.1 手动控制
如图 9所示,可以通过按钮选择手动控制,进而可以对每个水泵进行单独控制,使水泵按照要求随意切换。其中1#为变频水泵电机,2#和3#为工频水泵电机。
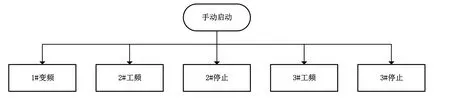
图9 手动控制流程图Fig.9 Manual control flow chart
4.2 自动控制
选择自动控制方式运行。在1#变频水泵、2#工频水泵都无故障的情况下,自动控制启动,1#水泵开始变频运行;如果系统检测到水位下降时,1#水泵转为工频,增加注水量;如果系统依旧检测到水位下降,说明1台水泵工频运行无法维持水位恒压,此时将启动2#工频水泵,两台水泵同时注水维持水位恒压;当系统检测到超过恒压水位设定值,1#水泵变频,2#水泵停止。如此循环往复形成一个闭环系统,自动控制系统主要是通过变频器运算处理液位变送器的反馈信号,来决定水泵电动机的运行状态或停止。
若在自动控制方式下,2#工频水泵电机出现故障,3#备用水泵电机代替2#水泵电机进行正常运作。自动控制流程图如图10所示。

图10 自动控制流程图Fig.10 Automatic control flow chart
4.3 梯形图设计
A/D模块DVP06XA-E2中的寄存器设定如图11所示。采用2号寄存器中的模式6(H0006),电流输入(4-+20 mA),3号、4号与5号寄存器均不使用;输出采用 6号寄存器中的模式 2(H0002),电流输出(4-+20 mA),同时关闭 7号寄存器。

图11 寄存器参数设定梯形图Fig.11 Register parameter setting ladder diagram
如图12所示,M1000表示运行监视常开接点(A接点),第一行表示读取 D9900此位置所存储的模拟量数据,D0表示液位传感器反馈回来的液位反馈值。第3、4、5行就是将读取到的模拟量位置进行转移。第7行则是进行运算,因为多点探测网络的量程是0-1 m,所以除以32 000将模拟量化为一个数值所对应的距离。第8行则是通过D2、D4来计算实时液位D6。

图12 源程序梯形图Fig.12 Source program ladder diagram
如图13所示,第一行计算1CM所对应的数字量,第2行可以进行手动设定恒压水位设定值D408(液位设定)。其中D24表示为液位PID设定值。

图13 液位设定梯形图Fig.13 Liquid level setting ladder diagram
对PID运算参数进行设定如图14所示,第1行定义了PID采样时间为1S,第2行确定PID为自动控制方向,定义输出上限为10 V,定义输出下限为0 V。其中M1002表示启始正向脉冲。
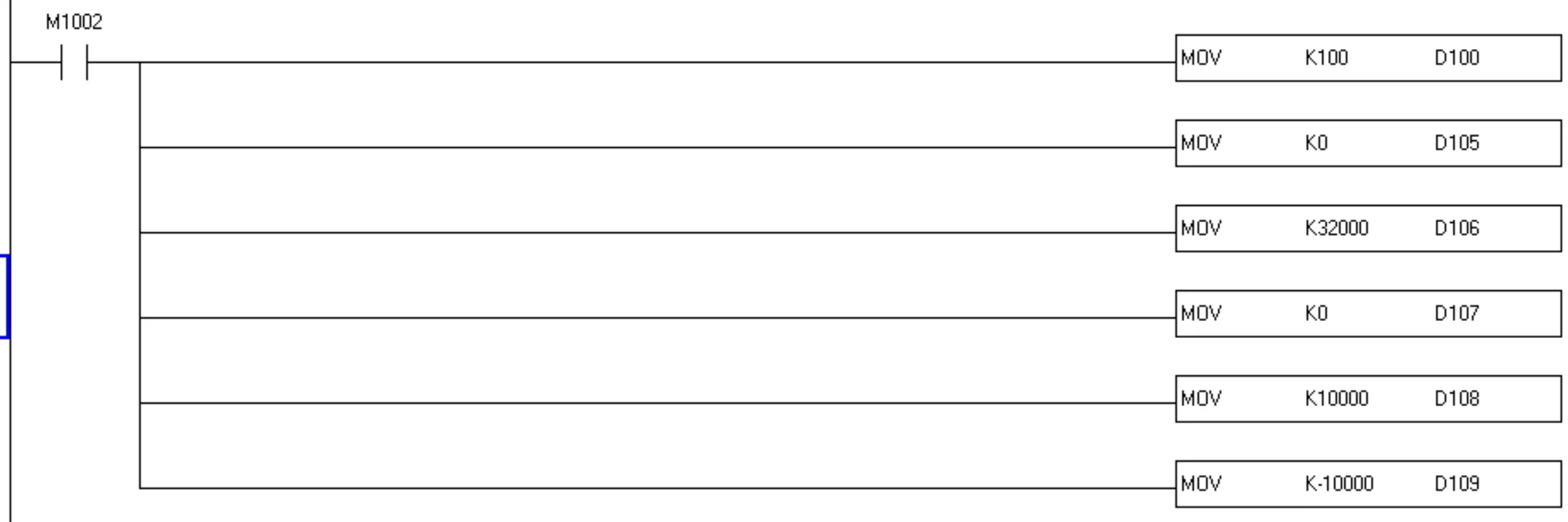
图14 PID参数设定梯形图Fig.14 PID parameter setting ladder diagram
PID运行如图15所示,D420为PID运算中的P值,D422为PID运算中的I值。故第1行为比例给定,第2行为积分给定。M1表示运行指示,第3行就是PID运算,其中D24表示液位PID设定值,D0代表液位反馈值,D30则表示PID结果,第4行则是将液位PID结果写入D9904中。

图15 PID运行梯形图Fig.15 PID running ladder diagram
如图16所示为系统控制程序,其中X0表示电机1过载,X1表示电机2过载,X2表示电机3过载,M2表示系统启动,M3表示系统停止,M5表示报警。Y0、Y1、Y2分别表示电机1、2、3启动,Y3表示变频器启动。

图16 系统控制梯形图Fig.16 System control ladder diagram
5 系统验证
在PLC实训操作台上进行智慧农业灌溉系统的调试与测试,要求灌溉系统可以实现变频调节农田水位,并且具备高灵敏度,高效率的特点。
5.1 硬件连接
依据智慧农业灌溉系统的主电路图将实验室操作台上的相关元器件连接起来,主要接口连接如表1、表2所示。

表1 变频器连线接口Tab.1 Inverter connection interface

表2 PLC A/D模块连线接口Tab.2 PLC A/D module connection interface
实际连接效果如图17所示,电路正常运行。

图17 实物连线图Fig.17 Physical connection diagram
5.2 软件仿真
进行软件编程之前要准备好编程软件WPLSoft 2.45,WPLSoft 2.45是台达PLC的编程软件,另外需要安装好组态王6.53,进行模拟操作。
编写过程如下,打开WPLSoft 2.45,打开菜单栏中“文件—新建”,会弹出“机种设置”的窗口,在“程序标题”中输入名称“智慧农业”,在机种里选择所需要的机种,在通信设置中可以选择传输方式。本文选择的是ES2,COM0。点击“确定”,就回到主窗口中,开始编写梯形图程序。
编写程序可以在工具栏中找到相应的输入、输出的符号,点击就可以添加到程序窗口中,也可以双击蓝色方块,就可以以指令模式输入程序。如图18所示。
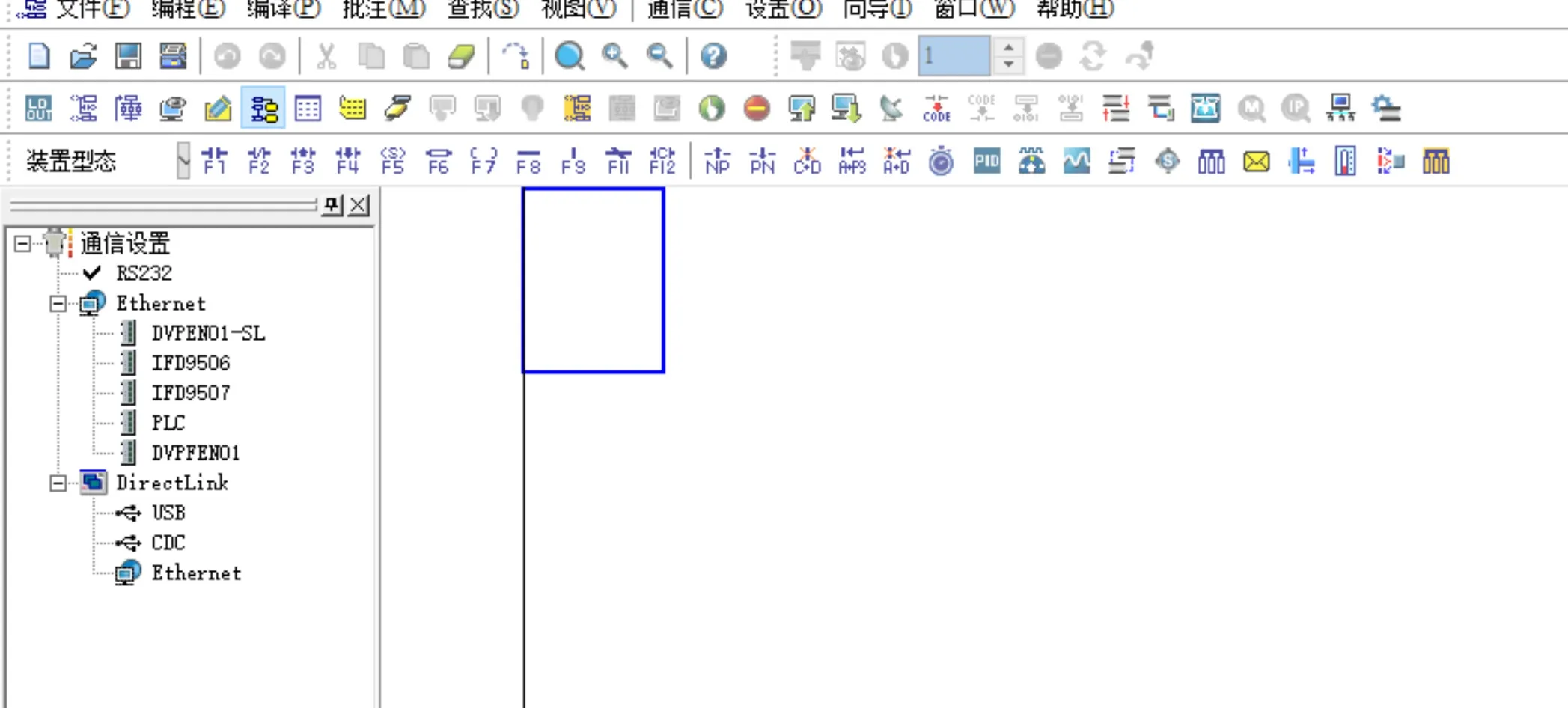
图18 程序编写界面Fig.18 Programming interface
编写完一个简单的程序后,依次点击菜单栏中的“编译—梯形图=>指令”,软件就会自动编译程序。编译完成后,依次点击菜单中的“通信—PC<=>PLC”,确定后将程序下载到PLC中,就可以进行调试了。
打开组态王 6.53,新建文件,输入名称“智慧农业”,输入工程名“灌溉系统”。进入后设置COM1的数据口为 7,点击“数据词典”设定需要的数据名称及其寄存器,如图19所示。

图19 数据词典设置界面Fig.19 Data dictionary setting interface
设置完数据后,点击新建“画面”,操作界面如图20所示。

图20 操作界面Fig.20 Operation interface
在经过硬件连接与软件仿真后,系统可以根据多点探测网络的反馈信息进行变频调节水位。当农田水位达到水位设定值下限时,控制系统控制变频水泵电动机开始变速运作,使水位达到预期值;当水位或水压超过预期值时,控制系统控制水泵电动机停止或降速,来维持农田水位保持一个固定值,且水位精度在1 mm。
6 结论
在智慧农业变频灌溉系统构建中,主要解决了两个问题:一是PLC对变频器的控制,增强了系统的灵敏度与安全性;二是上位机组态可以实时监测变频灌溉系统的运行,具有即时性。控制系统简单易操作,有通用性强、灵敏度高和经济实惠等特点。变频灌溉系统很好地克服了传统浇灌控制方式的缺点,具有其实用价值和应用前景。
猜你喜欢
石油工业技术监督(2022年7期)2022-08-18
湖北农机化(2020年4期)2020-07-24
电子制作(2018年23期)2018-12-26
通信电源技术(2018年3期)2018-06-26
电子制作(2017年8期)2017-06-05
现代工业经济和信息化(2016年22期)2016-08-23
通信电源技术(2016年4期)2016-04-04
质量技术监督研究(2015年1期)2015-04-09
汽车维护与修理(2015年2期)2015-02-28
自动化博览(2014年12期)2014-02-28