基于纯电动底盘的自卸式垃圾车控制系统设计与研制
2021-07-23 09:46:14王英豪
专用汽车 2021年7期
王英豪
甘肃建投重工科技有限公司 甘肃兰州 730030
1 前言
以北京、深圳地区为表率,全国越来越多的城市在主要控制范围内开始强制性使用纯电动环卫作业车辆。因此,基于纯电动二类底盘上的环卫车改装成为了当今环卫车制造业中的主流工作。与传统燃油车底盘改装相比较,其上装动力系统和控制系统具有最显著的特殊性,尤其是一些负载较小的环卫车辆,若直接利用底盘低压蓄电池取力其功率输出难以支持,而使用底盘自带的高压DC接口又会出现系统不匹配的情况。
本文以纯电动自卸式垃圾车为研究对象,设计了一种带有车载称重单元的上装控制系统,且在研制过程中,针对与目标底盘接口不匹配问题提出了可靠的解决方案,为纯电动自卸式垃圾车上装控制系统的研制拓宽了新思路。
2 上装动力系统结构设计
2.1 系统整体结构搭建
纯电动自卸式垃圾车底盘选用某品牌二类底盘,其底盘蓄电池正极保险盒预留有一路60 A的保险,为上装系统的12 V低压取电接口。根据底盘对接协议,该蓄电池最大功率不能超过720 W,负载所使用的油泵电机额定功率为2.2 kW/24 V或12 V的直流电动机。因此若直接在蓄电池上取电,直流电机瞬间启动电流大于100 A,会熔断蓄电池保险,并且造成蓄电池损坏。底盘多合一控制器预留一高压DC接口,可输出13 kW额定功率,能够满足负载功率需求,但接口电压与底盘平台电压一致均为DC290 V,需要对接口电压进行转换。
选用一种电源供应器,可输入端接入2 5 0~3 7 0 VDC、额定功率3 kW,满足负载的需求,经初期测试时发现,底盘预留的高压DC接口伴随底盘主高压继电器吸合输出直流高压。在底盘上高压时,电源供应器的大电容容性负载会导致底盘高压预充上电过程中电压达不到主继电器吸合条件,从而致使底盘上高压失败。因此需要设计一种适用于上装电源系统的预充电路,以满足需要。从底盘高压DC接口起,经过一个预充电路与电源供应器相连接,电源供应器输出端与负载连接,其整个系统的结构如图1所示。

图1 系统整体结构
2.2 预充电路设计
初期测试过程中,出现底盘高压上电失败的状态,通过报文采集发现电源供应器在电压150 V时达到激活条件。根据容性负载电压不突变特性,导致底盘上电预充上电过程中出口电压始终达不到主继电器吸合条件,从而致使底盘高压上电无法成功。这就需要设计一种适应于上装系统的预充电路,该电路使底盘单独进行高压上电流程,利用底盘上空余的按键开关,采集开关分断信号,根据分断信号控制预充电路继电器,从而实现既能满足底盘顺利高压上电,又能实现上装系统电源供应器激活,其设计的预充电路如图2所示。

图2 上装预充电路
设计中,继电器选择了一种灭弧能力较好的专用车载高压继电器,解决上装高压断电时出现的拉弧现象对底盘BCM的冲击,防止了整车高压断电。
3 控制系统的设计
3.1 控制系统结构设计
依据底盘厂改装要求,不推荐上装控制直接从底盘蓄电池直接取电,因此设计中对底盘钥匙开关产生的“ON”档信号进行处理,此时上装控制系统以底盘钥匙开关开启为上电条件。
整个上装控制系统由人机界面、称重传感器、变送器、GPS模块、遥控接收机组成。人机界面具有显示、控制以及参数调节的作用[1];遥控接收机接收油缸举升信号后将高低电平信号传递给主控制器;称重传感器采集到箱体压力后通过变送器将模拟量发送至GPS模块,GPS模块将模拟量转变为数字量并通过CAN网络传递至人机界面,将重量数值在人机界面上显示。其设计结构原理如图3所示。
3.2 控制系统软件设计
传统的硬PLC主要适用于工业控制场所,虽能够实现一些复杂的编程和逻辑控制,但是设备本身的防护等级以及抗震、抗复杂环境性能较差,不太适用于车载环境,因此本次设计选用了一种软PLC,即SoftPLC,也称为软逻辑,是将一种实用嵌入式控制器作为硬件支撑平台,利用软件实现传统硬PLC的基本功能。利用这种软PLC可以进行开关量控制、数学运算、数值处理、网络通信等功能[2]。

图3 控制系统电气原理图
本次设计选用了一种Cortex-M架构的JCP100-200嵌入式控制,以CoDeSys为编程平台,由于现实界面要读取箱体载重质量以及对举升油缸进行按键控制,需添加Image Pool控件,并且在Image Pool内添加BMP图片。在Main页面上,从Toolbox中的Common controls里添加一个TextField,并设置取值至要求的区域,如图4所示。

图4 图形化界面设计
4 称重系统的设计
设计中的自卸式垃圾车主要用于城市街道、社区垃圾收集并集中处理,为防止垃圾收集转运过程中出现垃圾乱排乱卸,以及方便进行片区垃圾转运量精准计量,需要安装车载称重单元以满足实际需要。传统的车载称重单元是将称重传感器直接固定在车架与上装箱体之间。为保证称重数据的精确度,称重传感器往往不能选用过大量程,因为在车辆带载行驶中,在地面减速带或者其他复杂路面情况的影响下,很容易产生因瞬间惯性冲击导致的传感器超载损毁的现象。本文设计了一种实现称重传感器脱开和投入的称重单元,支持称重传感器垫铁位置检测和箱体位置检测,并且在驾驶室上装控制系统上进行状态监控、传感器投切控制以及状态报警,整体车载称重系统工作结构如图5所示。
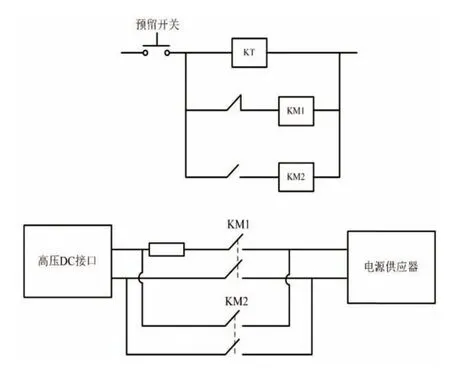
图5 车载称重系统工作结构
系统上电启动,完成初始化,终端进行系统自检。如自检完成后在Main主函数中循环运行所有任务。称重任务中,首先对称重传感器采集到的模拟量进行AD转换,然后将转换后得到的数字量会同其它称重相关信号量提供给 C P U,经过算法处理后得到车辆重量值。GPS定位任务中,当CPU检测接收到正确的GPS数据后,对其进行解析,得到车辆位置、速度信息,与上述称重值一起送给人机界面显示,并共同打包上传至客户端。存储任务对文件系统初始化和大容量存储器驱动完成之后,根据需要打开或创建文件写入当天内的数据,然后关闭文件[3-4]。
当检测到车箱抬起,此时绿灯亮起,提示称重传感器在称重状态;当投入称重传感器垫铁后,落下箱体时箱体重量压在称重传感器表面,此时提示称重传感器到位,并且蜂鸣报警器报警,提示已进入到称重状态,该状态下驾驶员不能驾驶车辆,否则容易导致称重传感器超载损毁。如图6所示。

图6 控制系统实物图
5 系统调试
首先使用电子磅对上装箱体进行称重,确定空载时单个箱体的标准重量,选用若干标准重量的沙袋备用,作为重量校准砝码。投入称重传感器,空载状态下落箱体,然后清除箱体重量将装载重量调零。逐渐均匀向箱体内填装标准沙袋,在装载重量显示框中读数,为调整显示读数与实际装载重量的误差,在软件设计时增加了系数调整窗口,对显示框读数与实际装载重量对比并进行调整,如图7所示。

图7 系数调整界面
基于GPS的客户端支持通过Internet访问所添加的车辆状态,如图8所示,在主界面上除可以查询车辆行驶轨迹和当前定位外,还可以实时访问称重系统上传的装载重量数值,帮助管理者对车辆进行统一管理和装载垃圾量的状态监控,判断工作人员是否按照规定标准进行垃圾装载及转运。

图8 客户端管理界面
6 结语
本文以纯电动底盘自卸式垃圾车制造为研究对象,克服纯电动底盘与上装动力负载不匹配的情况,设计并搭建了一套既满足底盘对接工况又能适用于负载的上装动力系统。经实地测试,纯电动自卸式垃圾车上装控制系统控制界面友好,操作不仅支持人机界面操作,还拓展了无线遥控功能,为上装部件的控制提供了方便。支持传感器位置检测、报警与投切控制的车载称重系统不仅解决了客户所需求的实时装载称重功能,还有效解决了车辆行驶中称重传感器超载损坏的问题,对同类环卫车辆控制系统开发有着重要的研究意义。
猜你喜欢
农业装备与车辆工程(2022年6期)2022-10-30 07:05:46
科技与创新(2021年19期)2021-10-14 03:28:36
汽车电器(2021年2期)2021-03-05 07:12:04
娘子关(2018年2期)2018-11-13 18:53:13
铁道通信信号(2016年1期)2016-06-01 12:10:17
广东石油化工学院学报(2016年6期)2016-05-17 05:17:33
专用汽车(2016年9期)2016-03-01 04:17:08
专用汽车(2016年4期)2016-03-01 04:14:30
电测与仪表(2015年2期)2015-04-09 11:29:18
专用汽车(2015年4期)2015-03-01 04:09:15