
城市轨道交通能量运行控制系统
2021-07-22 12:28李红波黄子昊罗文广张志学
控制与信息技术 2021年3期
李红波,张 超,黄子昊,王 雄,罗文广,张志学
(中车株洲电力机车研究所有限公司,湖南 株洲 412001)
0 引言
2015年12月获批的《巴黎协定》其中心目标是将全球平均气温比工业化前水平升高幅度控制在2 ℃以内,并努力将温度升高幅度控制在1.5 ℃以下[1]。公路运输在温室气体排放中占据主要地位[2],若要减少80%的总体碳足迹,就必须减少95%的公路运输[3]。然而,经济增长需要加强运输能力,这将导致温室气体排放量上升。针对减少温室气体排放和增加运输这两种要求相互矛盾的难题,城市电气化轨道交通由于具备良好的零碳排放和较强的运输能力,其重要性日益凸显[4]。
现有城市轨道交通(简称“城轨”)电网通常采用多脉波(12脉冲或24脉波)整流器,其将35 kV或10 kV的中压交流电转换为750 V或1 500 V的直流电给列车供电[5]。由于二极管整流器具有单向工作特性,再生制动能量无法被回收,导致直流母线电压升高,直接危害列车以及车载电气设备安全运行。
在过去的几十年中,轨道交通系统通常通过配置额外的制动电阻器来耗散多余的再生制动能量,以避免直流母线电压过冲。城市电气轨道交通是兆瓦级系统,再生制动能量巨大,所以制动电阻产生的热量会导致地铁隧道和车站内温度升高[6]。制动电阻器解决方案不仅浪费再生制动能量,同时还增加了环境控制系统的能耗。
为了解决这个问题,业界开展了再生制动能量回收技术的研究。再生制动能量回收技术可以分为两种:一种是通过能量回馈逆变器将再生制动能量回馈至35 kV电网,以用于其他负载,例如电站中的辅助设备[7];另一种是通过储能系统回收再生制动能量[8-9]。
再生制动能量回馈逆变器具有两种运行状态:当线路制动能量小于逆变器的容量时,能量回馈逆变器将所有制动能量有效地引入直流母线电压;当制动能量大于逆变器的容量时,能量回馈逆变器将以额定功率作为恒功率源运行,尽可能多地回收制动能量并抑制直流母线中的过电压。但如果能量回馈逆变器的电压指令设置不正确,由于相邻的列车无法充分吸收该能量,则会导致再生制动能量的利用效率降低。此外,在某些工况下,回收的能量被回馈至110 kV公共电网,不能被轨道交通系统负荷利用[7]。这种复杂的潮流增加了电网失稳的风险,且较长的传输路径会增加功率损耗并降低效率。而能量存储方案因为所有制动能量都被就近存储,避免了由复杂的潮流引起的功率损耗,因此具有比能量回馈逆变器更高的能量利用率;但再生制动功率和列车启动、加速等运行状态的功率曲线会呈现高峰值的脉冲形状。为了使储能系统具有较快的响应速度,应采用超级电容器或飞轮等功率型储能元件;但这些低能量密度的存储元件将增加系统的体积和成本[10]。另外,城轨交通供电系统目前采用电力数据采集和监控系统(power supervisory control and data acquisition,PSCADA),其只对电网部分状态进行数据监测及界面数据、图形显示、报表等简单数据处理[11],不具备利用数据在线对整个供电网络进行潮流优化调度的功能。
针对上述问题,本文提出一种新型的城轨智能牵引供电能量运行控制系统(简称“能量运控系统”)。与传统轨道交通牵引供电系统不同,本文牵引供电系统中的双脉波整流器和能量回馈逆变器被双向变流器所代替[12];另外,通过配置车载和地面4G无线通信模块(简称“4G模块”),在列车、双向变流器和能量运控系统之间建立通信环路。能量运控系统通过4G模块收集列车、双向变流器、变压器、牵引变电站以及牵引供电线和钢轨的参数,对双向变流器的输出电压指令进行优化,最终达到降低电能传输损耗、抑制列车输入电压波动、降低钢轨电位的目的。
1 能量运控系统架构
牵引供电系统主要包括基于双向变流器的变电站、列车、地面4G模块和车载4G模块以及能量运控系统(图1)。本文所提能量运控系统是可逆型智慧地铁牵引电网的上层控制单元。

图1 牵引供电系统Fig. 1 Traction power system
4G模块被分别安装在双向变流器、列车和能量运控系统内部,在变流器和能量运控系统之间进行数据通信。出于系统安全性考虑,列车仅向能量运控系统发送状态量,但不接收能量运控系统指令,因此列车必须按照规划的运行图行驶,在地铁运营期间无法通过能量运控系统对运行图进行实时调整。
能源运控单元是能量运控系统的核心,包括服务器、数据库、4G通信模块、监视器、键盘和其他外围输入及输出设备,提供数据发送、接收、分析以及控制策略制定的功能。根据目标函数和系统物理约束条件,能量运控系统通过智能算法确定直流网的功率分配,以实现节能、稳定电压和优化供电质量的目标。
作为物理执行单元,双向变流器跟踪来自能量运控系统的输出电压命令,以完成列车和牵引电源系统之间的实际潮流分配。
牵引变电站的位置、直流输出电压、电流、列车功率列车运行位置以及牵引网导线阻抗、钢轨阻抗等参数信息通过4G模块传输至能量运控系统。根据接收到的数据,能量运控系统首先迭代计算牵引供电系统的导纳矩阵、节点电压和节点电流,以完成实际牵引供电系统的数字化重构。然后在确保牵引供电系统和列车安全稳定运行的前提下,考虑输电损耗、交流110 kV电网功率因数、变电站容量、电网电压波动和钢轨电位等约束条件,通过启发式算法搜索直流输出电压、无功和有功电流的最优指令。最后,将优化指令下发给线路双向变流器。另外,能量运控系统可以动态调整牵引网全线双向变流器的输出特性,灵活地分配各个双向变流器的输入、输出功率,从而实现对邻近故障变电站的能量救援,以确保牵引供电系统的供电可靠性。
2 能量运控系统工作原理
牵引供电能量运控系统优化调度策略有两个关键:(1)每个采样周期内重建真实的供电网络;(2)针对多个目标和约束条件,能量运控系统通过遗传算法求解双向变流器的直流输出电压。
2.1 牵引供电系统的数字重构
2.1.1 系统建模
由于每个牵引变电站都采用双向变流器与列车交换能量,为方便表述,本文用双向变流器替代牵引变电站作为牵引供电系统模型中的电压源或功率源节点[13]。
牵引供电网的等效电路如图2所示,其中Vx,ix和rcx(x=1, 2, …,n)分别表示第x个双向变流器的直流输出电压、电流和等效输出阻抗;VTx表示第x列列车的直流输入电压;PTx表示第x辆列车的功率;Rx表示第x个和第(x+1)个双向变流器之间传输线的阻抗。整个运行过程中,双向变流器的状态函数S为

图2 牵引供电系统等效电路模型Fig. 2 Equivalent circuit model of traction power system

式中:Pmax——双向变流器峰值功率,其中Pmax_T表示整流模式下峰值功率,Pmax_F表示逆变模式下峰值功率;PLoad——列车功率。
当双向变流器的最大功率大于负载功率需求时,将变流器等效为电压源;而当双向变流器的最大功率小于等于负载功率需求时,将变流器等效为恒功率源。两种模式的功率输出方式不同,Pmax_F是Pmax_T的两倍。这是因为在工作周期内,在逆变模式下,双向变流器先运行30 s并回收制动能量,然后再停止运行90 s;而在整流模式下,双向变流器连续输出功率。
近年来,随着车载制动电阻器的取消,线路上运行的列车可被等效为一个时变功率源。
2.1.2 牵引供电系统节点电压和潮流计算
牵引供电系统节点电压计算流程如下:
(1)根据牵引线和钢轨的阻抗、每列列车的实时位置以及每个变电站的位置来制定节点导纳矩阵,然后设置每个双向变流器和每个列车的初始电压值。
(2)利用Picard算法计算节点电压,并将其用于更新双向变流器和列车的状态。如果迭代值收敛,则迭代过程完成;否则,在更新来自列车的数据并修改节点导纳矩阵之后,计算程序将跳至Picard迭代步骤,并重复之前的步骤。图3示出节点电压计算具体流程。

图3 节点电压计算流程Fig. 3 Calculation flow chart of node voltages
为方便定义节点导纳矩阵,图4示出牵引供电系统的简化网络拓扑。
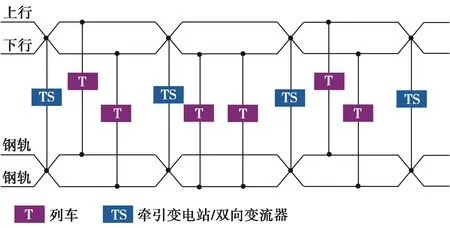
图4 牵引供电系统简化网络拓扑Fig. 4 Simpli fied network topology of the proposed traction power system
导纳矩阵的节点根据距地铁线路始发站的距离进行升序排列。由于列车的移动性,通常需要在下一个采样周期内对导纳矩阵的节点进行重新排序以形成新矩阵。而双向变流器的位置不变,因此不必每次都重新配置导纳矩阵中双向变流器的节点位置。于是,可依次按双向变流器、上行列车、下行列车顺序排布,构建节点导纳矩阵Y:

式中:Yss——双向变流器之间的节点导纳矩阵;Ytt——列车之间的节点导纳矩阵;Yst——双向变流器和列车之间的节点导纳矩阵;Yts——列车与双向变流器之间的节点导纳矩阵,由于矩阵的对称性,因此Yts和Yst相同。
以Yss为例说明计算过程。假设无列车在地铁线上行驶,则第i个供电区间的导纳矩阵Yss中的牵引线导纳(gT,i)、钢轨导纳(gR,i)和泄露导纳(gX,i)依次按式(3)计算获得。

式中:li——第i个供电区间的长度;r1,r2——牵引线缆和钢轨的单位电阻;g0——钢轨的单位泄漏导纳。
考虑第i个供电区间中的上行列车的情况,应将第i个双向变流器和第(i+ 1)个双向变流器对应的节点导纳修改为

同样,如果第i个供电区间中有一个下行列车,则Yss也可以根据式(4)进行修正。Yss和Yst需要根据每列列车的实时位置进行更新。Yss中的对角元素可以由Ytt和Yst获得,而无须额外进行计算。
在获得节点导纳矩阵之后,可以通过Picard法来计算整个系统节点电压和系统潮流,从而完成牵引供电系统的数字重构。
2.2 基于双向变流器的能量管理策略
基于双向变流器的能量管理策略旨在通过动态调整双向变流器的直流输出电压,在保证整个地铁线路正常运行的前提下尽可能地降低牵引电网能耗。
牵引电网能耗的目标函数如下:
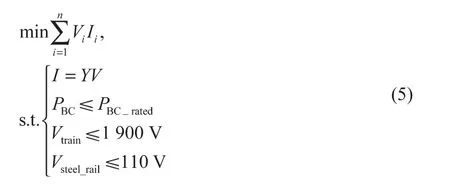
式中:Vi——第i个双向变流器的直流输出电压;Ii——第i个双向变流器的直流输出电流;PBC,PBC_rated——双向变流器的实时功率和额定功率;Vtrain——列车供电电压;Vsteel_rail——节点轨电位;n——线路中变电站的总数。
根据标准EN50122-1:1998《铁路应用——地面装置》,轨电位不得高于110 V。另外,制动工况下,当Vtrain>1 900 V时,列车将启动闸瓦制动,以减少再生制动能量,阻止电压继续升高;但此时,列车制动能量将被转化为热能耗散到空气中,造成能量的浪费。因此在优化目标函数中,增加列车电压不超过1 900 V的约束。
在满足列车正常运行需求的前提下,可以通过减少电能传输损耗和提高再生制动能量在牵引列车和制动列车之间循环利用率来降低整个牵引供电系统的能耗。这两种方式都可以通过调整每个双向变流器的直流输出电压来实现。
基于牵引供电系统的数字重构和目标函数可以通过遗传算法来求解每个双向变流器最优直流输出电压。图5示出最优解的可行区域。最优解的搜索轨迹随机分布在阴影区域。当双向变流器的直流输出电压不高于Vth_T时,双向变流器被切换到整流模式以向列车提供牵引功率。当直流输出电压高于Vth_T时,双向变流器运行在逆变模式,将制动能量回馈至35 kV交流电网。若电流在(-Inlc,Inlc)区间,则说明在相邻两个双向变流器之间的供电区间内无列车运行。在这种情况下,采用下垂控制来抑制相邻双向变流器间的环流,以降低双向变流器的空载损耗。双向变流器达到其峰值功率时,将转换至恒功率源模式。

图5 双向变流器运控曲线Fig. 5 Control curve of bi-directional converters
3 仿真和试验验证
为了验证上述能量管理策略的有效性,通过仿真和现场试验,利用第2节的模型,对牵引电网进行实时重构,优化并控制双向变流器输出电压,实现线路运行车辆再生制动能量的合理分配利用。
3.1 系统仿真
基于某中部城市地铁2号线线路阻抗参数,对本文所提能量运控系统进行仿真验证,仿真参数如表1所示。该地铁2号线所有牵引变电站均配置双向变流器,上下行共有8个牵引变电站和9列列车。列车的运行图和功率曲线如图6所示,图6(a)中不同颜色代表不同的列车。正功率值表示列车吸收能量,负功率值表示列车回馈再生制动能量。

图6 列车运行曲线Fig. 6 Running curves of trains

表1 仿真参数Tab. 1 Simulation parameters
表2示出有无能量运控系统牵引电网全线能耗对比数据。无能量运控系统进行优化时,每个双向变流器的直流输出电压固定为1 800 V;增加能量运控系统进行优化后,每个双向变流器的直流输出电压在1 750 V至1 850 V的范围内变化。能量运控系统的目标为回馈能量和传输线损耗最小化,以确保相邻列车充分利用再生制动能量。由表2可知,经能量运控系统优化之后,全线牵引变电站牵引输出能量由1 755.8 kW·h减少至1 607.68 kW·h,同时向35 kV电网回馈的再生制动能量由585.45 kW·h减少至442.43 kW·h。全线牵引电网总能耗由1 170.35 kW·h减少至1 165.25 kW·h,系统总能耗降低了0.436%。

表2 能量运控前后系统能耗对比Tab. 2 Comparisons of systematical energy consumption w/o the energy control system
3.2 现场试验
本文所提能量运控系统在某城市地铁4号线进行了试验验证。由于受到地铁运营的限制,现场试验选取了4个牵引变电站、2列车进行测试。4个牵引变电站的总长度为13.59 km,每列列车的最高速度为76 km / h,峰值功率为4.2 MW,数据采样周期为100 ms。
目前国内还没有全线配置双向变流器的地铁线路,因此在试验中牵引供电系统仍包含24脉波整流器。为了验证本文所提的优化策略有效性,能量回馈装置开通双向变流功能,并控制直流输出电压最小值高于24脉波整流器的空载直流输出电压(1 680 V),使得整流器反向截止。
图7示出奥体中心站电压、电流波形。由于能量回馈装置的额定功率仅为1.6 MW,在牵引网重载情况下不能满足列车的功率需求,因此牵引网电压会降低,使得24脉波整流器导通,进而补充列车所需功率差额。

图7 奥体中心站电压、电流波形Fig. 7 Voltage and current waveforms of Olympic Gym center substation
图8 示出列车运行状态数据。由图可知,列车的最大牵引电流在12:17:05时刻达到2 728 A,受电弓电压降低到1 544 V,列车功率为4.2 MW,由双向变流器和二极管整流器共同提供能量。

图8 列车运行状态数据Fig. 8 Operation status data f trains
图9 示出运控系统优化前后牵引电网能耗对比的试验数据。整个试验持续42 min。通过能量运控系统优化后,4个变电站的总牵引能量从1 204.84 kW·h降低至1 144.50 kW·h;双向变流器回馈能量从455.38 kW·h降低至397.51 kW·h。制动列车和牵引列车之间的循环能量从10.76 kW·h增加到80.01 kW·h;35 kV交流电网的总能耗从1 167.86 kW·h降低至1 076.22 kW·h。需注意的是,两列列车的总能耗在没有能量运控系统的情况下为1 057.35 kW·h,而在有能量运控系统的情况下为974.67 kW·h。差异是由对比试验中两个驾驶员的驾驶习惯和环境温度不同造成的。考虑以上因素,通过能量运控系统优化后,交流电网的总能耗降低了0.767%。
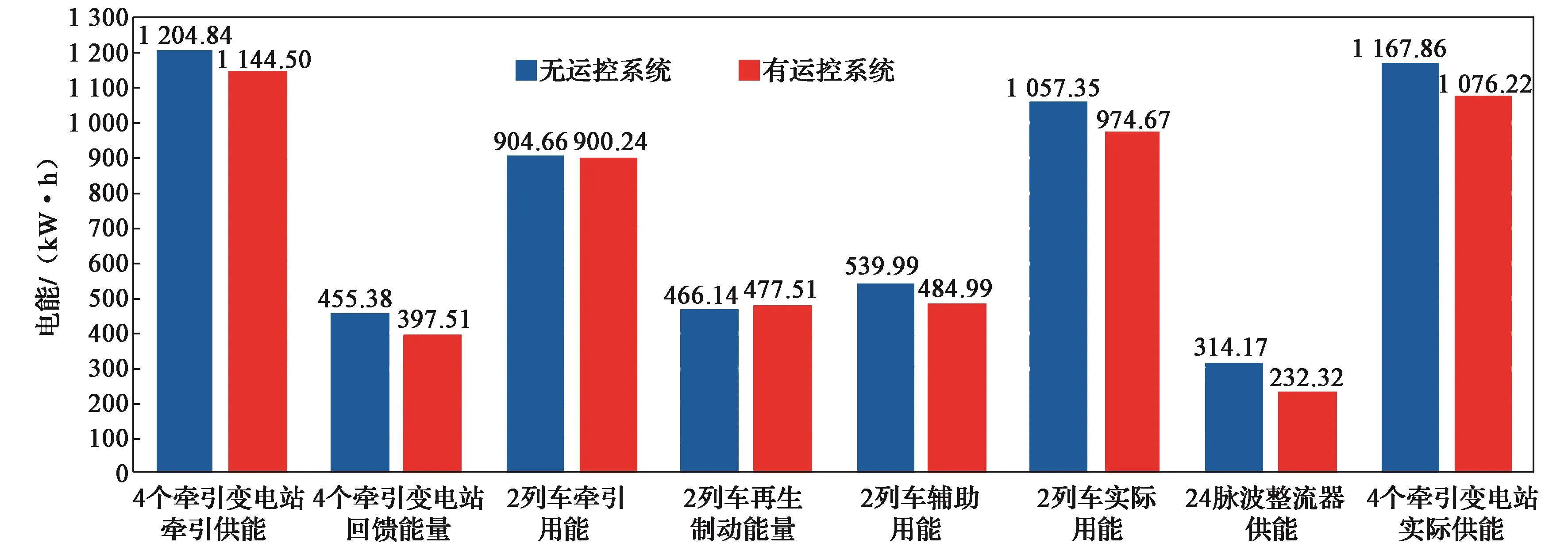
图9 采用能量运控系统优化前后牵引电网能耗对比Fig.9 Comparison of traction grid energy consumption with and without energy control system
4 结语
本文提出了一种基于双向变流器的地铁牵引供电网能量运控系统。该系统采用无线4G模块实现与列车、双向变流器的数据交互。通过通信链路获取列车、牵引电网、变流器等信息,以降低牵引网能耗、提升再生制动能量利用率为目标,对全线路双向变流器直流输出电压进行优化,进而实现全线节能和电能质量的提升。
在某城市地铁线上的试验结果显示,所提能量运控系统可以有效提高列车对再生制动能量的利用率,降低牵引电网总体能耗0.767%。下一步工作将重点研究数据传输延迟对系统节能和稳定性的影响以及系统故障处理技术。
猜你喜欢
都市快轨交通(2022年2期)2022-06-28
汽车实用技术(2022年9期)2022-05-20
今日农业(2021年19期)2021-11-27
建材发展导向(2021年13期)2021-07-28
家庭影院技术(2021年3期)2021-05-21
航天工业管理(2020年9期)2020-12-28
科技传播(2019年22期)2020-01-14
科技传播(2019年22期)2020-01-14
科学导报·科学工程与电力(2019年5期)2019-10-20
人大建设(2018年7期)2018-09-19
