合肥轨道交通1、2号线ATO模式下列车牵引和制动控制电路的优化
2021-07-21 02:53:10杨帅帅
城市轨道交通研究 2021年7期
杨帅帅
(合肥市轨道交通集团有限公司, 230601, 合肥∥工程师)
牵引控制系统和制动控制系统作为列车正常运行的基础,是城市轨道交通列车最重要的2个系统。其中:列车牵引控制系统根据不同模式下的牵引控制指令及牵引需求输出牵引电机的驱动,使列车以目标速度运行;列车制动控制系统根据不同模式下触发的制动指令与需求,通过电制动与气制动的方式,使列车按照计划进行减速及停车,实现列车的安全运行。本文对合肥轨道交通1、2号线列车在ATO(列车自动运行)模式下的牵引和制动控制电路优化进行研究。
1 ATO模式下的牵引和制动控制电路介绍
合肥轨道交通1、2号线列车均采用6节编组B2型列车,且在ATO模式下列车的牵引和制动控制接口电路完全一致。本文以2号线在ATO模式下的牵引和制动控制电路为例,对电路控制的基本原理进行介绍。
2号线在ATO模式下信号系统通过OBCU(车载控制单元)给AMTDR(牵引指令继电器)、AMBDR(制动指令继电器)供电,实现牵引、制动控制指令的触发。每端的OBCU均可同时给列车两端的AMTDR、AMBDR供电,其供电原理如图1所示。
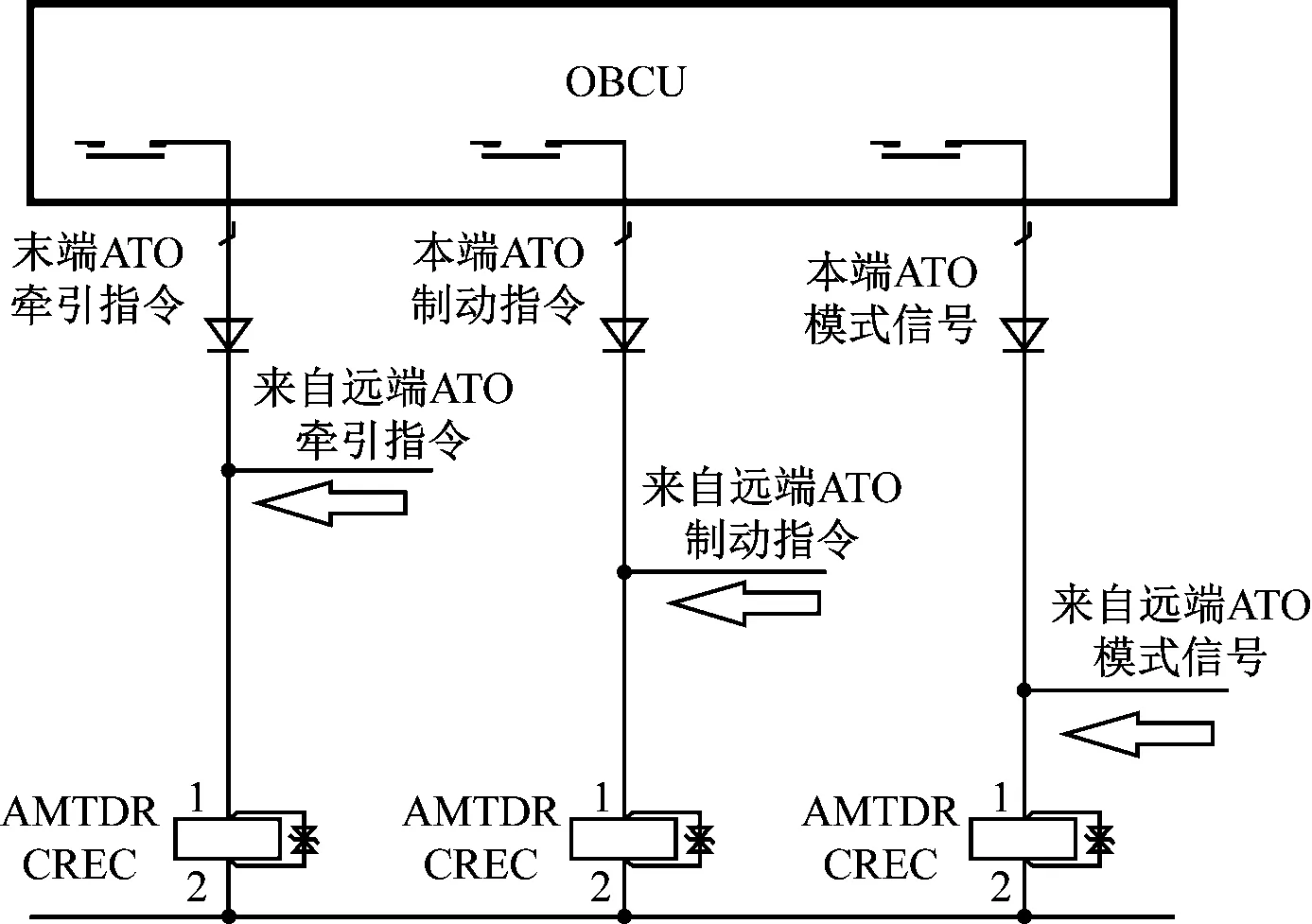
注:AMR——ATO模式继电器; CREC——司机室右侧电器柜;箭头表示线路得电后的逻辑走向。
列车收到ATO制动指令后,AMBDR得电,通过AMBDR在列车制动控制电路中的常闭触点断开,使制动指令列车线失电(低电平有效),列车触发制动模式,根据信号系统给出的制动力需求值完成制动力的施加,使列车达到计划的减速运行效果。
列车收到ATO牵引指令后,AMTDR得电,通过AMTDR在列车牵引控制电路中的常开触点闭合,使牵引指令列车线得电(高电平有效),列车触发牵引模式,根据信号系统给出的牵引力需求值完成牵引力的施加,使列车达到计划的加速运行效果。
2 ATO模式下的牵引和制动控制电路原理
通过对合肥轨道交通1、2号线ATO模式下的牵引和制动控制电路深入分析,发现信号与车辆各自系统控制电路均符合要求,但在信号与车辆的接口设计中存在一定的问题。
2.1 信号专业的牵引和制动控制电路设计
如图1所示,在信号侧ATO模式牵引和制动控制电路设计中,列车两端任何1个OBCU均可同时给两端的AMBDR、AMTDR供电。该设计既可满足2个OBCU正常输出指令,也可实现控制指令输出的冗余。
2.2 车辆专业的牵引和制动控制电路设计
如图2所示,在车辆侧ATO模式制动控制电路设计中,通过MCCB(司机控制器断路器)、AMR常开触点及AMBDR常闭触点形成制动指令列车线的供电控制。通过对列车两端ATO模式下制动指令列车线供电进行分析,可以发现在ATO模式下,列车两端AMR均得电,并且在OBCU输出制动指令时列车两端的2个AMBDR也均得电,即ATO模式下列车两端的AMBDR均可对制动指令列车线供电进行控制。
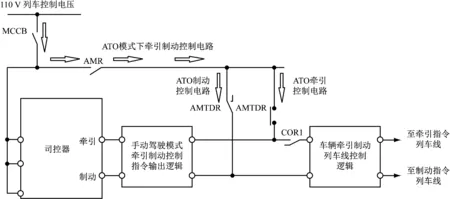
注:COR为司机室激活继电器。
在车辆侧ATO模式下的牵引控制电路通过MCCB、AMR常开触点及AMTDR常开触点后,与本端的COR1常开触点串接,形成牵引指令列车线的供电控制。通过对列车两端ATO模式下牵引指令列车线供电进行分析,可以发现虽然在ATO模式下列车两端的AMR均得电,OBCU输出牵引指令后两端的AMTDR也全部得电,但由于供电回路需经过COR1常开触点,ATO模式下的牵引指令列车线仅在主控端可以实现牵引指令列车线的供电。
2.3 信号与车辆的接口控制电路问题
由上分析可见,ATO模式下制动指令列车线的供电来自列车两端,可同时进行控制。但由于此列车制动指令列车线采用低电平有效的控制方式,因此如果列车两端任意1个AMBDR发生故障,其在制动控制电路中的常闭触点就无法断开,从而导致ATO模式下制动指令列车线一直保持高电平的状态,列车无法触发制动指令,制动无法正常施加,可能引发列车越站或冲标,故列车运行存在较大的安全隐患。
对比仅由主控端AMBDR进行制动指令列车线控制的方式,现有接口设计的控制方式使得制动指令列车线出现故障的概率增加1倍。同时,由于任何一端司机室被激活均对AMBDR进行得失电控制,使AMBDR的使用频率增加1倍,将导致AMBDR提前老化,缩短了继电器电气的使用寿命。在ATO模式下牵引指令列车线的控制方式上,同样存在使AMTDR的使用频率增加1倍、继电器电气使用寿命缩短的问题。
3 AMTDR、AMBDR的动作频次计算
AMBDR、AMTDR的动作频次可通过每日列车运营信息及列车事件记录进行统计和计算。由于AMBDR、AMTDR的计算方式相同,本文仅以2号线的AMBDR为例进行动作频次计算分析。其计算公式如下:
N=365t1N0/t2
(1)
式中:
N——平均每个AMBDR的动作频次,次/年;
t1——正线列车平均每日开行列次数,列次;
N0——每开行1列次AMBDR的动作频次,次;
t2——2号线配属列车数量,列。
2号线现有28列电客车,根据该线目前的运行图,每日载客开行列次约为310列次。根据列车事件记录仪的信息,列车在正线上正常开行1列次,AMBDR动作次数约为48次。将以上数据代入式(1),可得到列车1年内每个AMBDR在正线运行时的动作次数为193 971次。另外,考虑列车在维保测试过程中AMBDR的动作情况,估计列车1年内每个AMBDR的动作频次在20~22万次。目前2号线列车AMBDR采用的继电器,其电气使用寿命约为50万次,结合实际情况,则大约2年半即达到继电器的电气使用寿命。
达到继电器电气使用寿命后,会进一步增大出现故障的可能。因此,在设计上采取改良措施,对接口电路进行优化,对提升设备稳定性、保障系统的正常运行具有重要意义。
4 接口控制电路的优化措施
4.1 优化方案1
如图3所示,在AMBDR上方串接司机室激活继电器的常开触点,保证ATO模式下列车制动控制时只是主控端AMBDR得电。按照此方案优化后,列车制动电路仅通过主控端进行供电控制,远端AMBDR不得电,常闭触点一直处于闭合状态,可以有效降低由于AMBDR故障导致制动控制指令列车线异常得电的概率,同时还可以使AMBDR的动作频次减少一半,进而延长AMBDR的使用寿命。同理,AMTDR的供电方式采用同样的优化设计方案后,也可以使AMTDR的动作频次减少一半,延长AMTDR的使用寿命。

图3 仅有主控端AMBDR/AMTDR得电的优化方案
4.2 优化方案2
优化方案1既有效降低了继电器的使用次数,也降低了AMBDR故障导致的制动指令列车线异常得电的概率,但是在接口电路设计中未起到冗余作用。为了进一步降低电路的故障概率,增加系统稳定性,可以采取以下优化方式:
1) 对于ATO制动控制电路:可将ATO模式下制动控制电路(见图2)中AMBDR常闭触点更换为常开触点的方式,修订信号侧OBCU制动信号的触发逻辑。即:将信号系统OBCU制动信号输出逻辑修订为低电平为有效制动信号、高电平为无效制动信号,且备用OBCU在正常状态下制动指令输出低电平信号,保证不会对主用OBCU制动逻辑触发造成干扰。此优化方案的AMBDR动作频次与优化前方案的AMBDR动作频次相同,可实现ATO模式下制动控制电路供电的冗余,可以很好地降低AMBDR故障导致制动指令列车线发生故障的概率。
2) 对于ATO牵引控制电路:只需优化牵引指令列车线控制电路的方式,取消图2中COR1常开触点,使得列车两端AMTDR对列车牵引指令列车线供电形成冗余。此优化方案的AMTDR动作频次与优化前方案一致,但可以实现ATO模式下牵引控制电路供电的冗余,有效降低AMTDR故障导致牵引指令列车线发生故障的概率。
5 结语
随着合肥轨道交通1、2号线运营时长的增加,相关继电器使用频次逐渐增加,设施设备均会出现不同程度的老化,越来越多的问题将逐步体现出来。需要及时对问题进行深入分析、总结,采取有效的措施降低各类故障的概率,减少由于设备原因对日常运营产生的影响,保障城市轨道交通线路的安全、高效、平稳运营。
猜你喜欢
城市轨道交通研究(2024年1期)2024-02-23 07:28:36
武汉广播影视(2022年6期)2022-12-28 06:38:12
军民两用技术与产品(2020年8期)2020-09-07 13:37:18
现代城市轨道交通(2020年1期)2020-02-14 15:35:49
铁道通信信号(2020年11期)2020-02-07 01:02:34
汽车维护与修理(2019年3期)2019-08-08 02:29:10
汽车维护与修理(2018年5期)2018-09-29 02:41:46
汽车维护与修理(2018年23期)2018-07-03 07:10:10
汽车维护与修理(2017年5期)2017-11-17 01:54:49
都市快轨交通(2014年4期)2014-02-27 08:35:09