基于心跳机制的电动汽车充电CAN报文研究
2021-07-21 09:24周长鹏王智东李志锋冯瑞珏杨树丰曾献煜
环境技术 2021年3期
周长鹏,王智东,李志锋,冯瑞珏,杨树丰,曾献煜
(1.广州城市理工学院 电气工程学院,广州 510800; 2.华南理工大学 电力学院,广州 510640)
引言
“十四五”作为碳达峰、碳中和关键期和窗口期,以构建清洁、低碳、安全、高效的能源体系为切入点,大力推进绿色能源应用的发展。电动汽车凭借能源利用率高、绿色环保、高度智能等优势已被纳入国家战略规划当中,电动汽车产业的高速发展将为绿色能源体系建设提供强有力支撑。截至2021年3月,公安部统计数据表示,我国新能源汽车保有量551万辆,其中纯电动汽车占比81.53 %。在如此庞大的电动汽车保有量下,电动汽车的核心储能器件车载电池备受人们关注,车载电池管理系统的优劣直接影响整车性能[1]。目前被人们广泛应用且能源利用率较高的充电方式是通过充电桩、电缆以及充电枪等组件将电网中的电能输送给车载电池。电动汽车在充电过程中充电桩与车载电池管理系统之间会进行数据通信,传输信息包括温度值、电压电流值、充电控制信号等,这些信息关乎充电环节能否正常进行,如果传输数据发生格式错误或者传输链路中断,轻则导致电动汽车储能系统损坏,重则整车报废甚至危及人身安全[2,3]。2015年4月,深圳湾口岸一辆电动汽车在充电时发生自燃,周围充电桩以及整车均烧毁报废,事件的调查结果为电动汽车在充电完成后充电桩未收到车载电池管理系统的已充满停止充电指令,导致充电桩没有及时停止充电,车载电池过充1.2 h并发生自燃[4]。因此,2015年12月发布的电动汽车非车载传导式充电机与电池管理系统之间的通信协议(GB/T 27930-2015)规定[5],在各个阶段,充电机和BMS(电池管理系统)如果在规定的时间内没有收到对方报文或没有收到正确报文,即判定为超时,以此来对充电通信链路进行监管,以防止数据丢失或链路中断导致充电环节崩溃。但对于如何实现高效的链路中断检测,并没有具体的方法。适用于电动汽车的充电链路检测方法应具备以下特点,一方面要高效,避免占据带宽;另一方面要结合充电信息的特点,链路中断时能及时发现。
本文针对如何高效实时监测电动汽车充电链路的问题,提出一种基于心跳机制的电动汽车充电CAN报文,通过心跳报文的办法实现对充电通信链路的监管,有效防止车载电池由于充电通信链路异常导致过充问题的发生。
1 充电通信架构的设计
根据国家标准GB/T 27930-2015要求[5]:①充电机与BMS之间的CAN通信网络应由充电机和BMS两个节点组成;②在充电过程中,充电机和BMS检测电压、电流和温度等参数,同时BMS管理整个充电过程;③充电机和BMS在规定的时间内没有收到对方报文或没有收到正确报文,即判定为超时,一般规定超时时间为5 s。当超时出现后,BMS或充电机发送规定故障报文,并进入故障处理状态。针对以上要求设计充电桩通信结构如图1所示,车载电池与电动汽车BMS是电动汽车内部系统,当电动汽车进行充电工作时,配电设备通过充电桩将电能转换成符合电动汽车充电标准的电气量供车载电池充电使用,充电过程中充电桩与电动汽车BMS通过CAN总线进行信息交互,交互内容包括充电过程中的电压、电流、温度等信息,BMS向充电桩发送充电开始和结束等控制信息,整个充电过程由BMS做主,当充电完成或充电链路中断等问题出现时,由BMS控制结束充电或其他应急措施,充电桩后台主机系统实时获取站内每台充电桩的充电信息,保证整个充电站的安全稳定运行。

图1 充电桩通信结构示意图
在充电桩通信结构的基础上对电动汽车充电通信逻辑进行设计如图2所示,充电通信过程主要分为物理连接准备和CAN通信两个部分,物理连接准备部分主要分为物理连接完成和低压辅助上电阶段,此部分为CAN通信提供物理链路的准备,是CAN通信正常工作的前提条件;CAN通信部分主要分为充电握手阶段、充电参数配置阶段、充电阶段和充电结束阶段,通信过程中充电桩与电池管理系统首先利用充电握手动作进行身份识别,然后对充电参数进行配置,配置完成后充电桩开始对车载电池进行充电,直至充电完成。本文在传统CAN通信基础上提出基于心跳机制的电动汽车充电CAN通信逻辑,在传递充电信息的CAN报文过程中加入心跳报文,心跳报文由定时器控制发送,充电桩控制到达规定时间后主动发送固定格式的心跳报文,当BMS没有收到心跳报文或心跳报文格式错误时,即判断通信故障并及时采取通信重连或结束充电等保护举措,这种办法可有效防止由于通信链路异常导致车载电池过充的问题发生[6]。
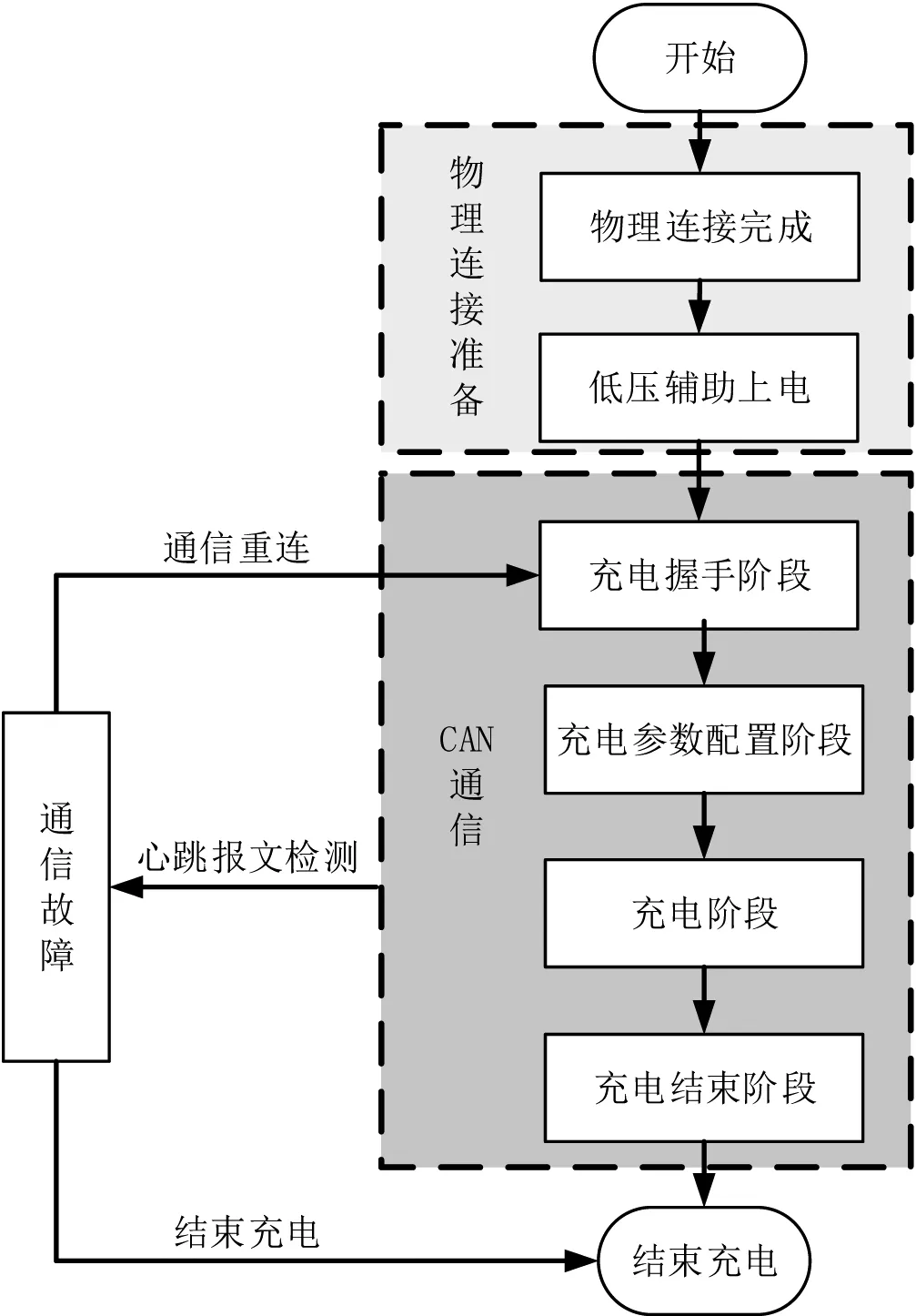
图2 充电通信流程图
2 CAN总线报文研究
充电桩与BMS之间通信网络采用CAN 2.0B通信协议。
1)CAN信息包格式
CAN信息包格式结构如表1所示,前两字节主要用来记录信息包的基础信息,信息包中1字节用来保存目标地址等接收信息,2字节包括高三位的标识符,一位RTR和4位DLC,DLC用来表示数据长度;后8字节为数据位,用来发送具体数据。

表1 CAN信息包格式结构
2)CAN 2.0B消息帧格式
CAN 2.0B消息帧的格式如图3所示,CAN报文由7部分组成,每部分位数固定,其中SOF(帧起始)1位,用来标志数据帧开始;仲裁段32位,用来在总线产生竞争时通过此帧所规定的优先级来判定通信顺序;IDE(扩展帧)1位;R0、R1是预留位,DLC(BCD编码的数据长度代码)4位;数据段0~64位,基于心跳机制的电动汽车充电CAN报文的心跳信息位存放在数据段中,用来记录充电过程中的通信心跳信息;CRC(数据校验位)15位;ACK(错误信息位)2位;EOF(帧结束)7位。

图3 CAN 2.0B消息帧格式
3 基于心跳机制的CAN总线报文设计
心跳机制是通信协议中的一种,心跳机制的用途主要有两种,一种是用于监测通信链路的实时状况,一种是用于保持发端与收端的长连接。本文主要研究心跳机制在通信链路的实时监测作用。本文采用推送模式(Push)心跳机制,该模式工作时,被监测端定时向监测端发送心跳报文,当监测端在规定的时间内收到正确心跳报文,则认为通信正常,若监测端在规定的时间内没有收到报文或报文格式不正确,则认为通信链路异常,本文应用时BMS属于监测端,充电桩属于被监测端,充电桩定时向BMS发送心跳报文,Push模式心跳机制如图4所示。
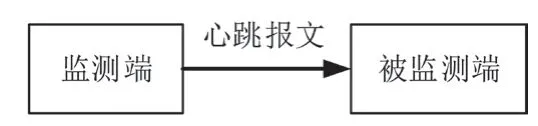
图4 Push模式心跳机制
CAN报文主要用于传输电动汽车充电过程中的控制命令和电气参数等直接影响整个充电系统稳定运行的重要信息,因此保证通信链路传输的实时性与稳定性显得及其重要。本文采用心跳报文的方式对充电桩和BMS之间的CAN通信进行设计,利用心跳机制不间断的在充电桩与BMS之间发送CAN报文,基于心跳机制的CAN数据帧格式如图5所示,心跳信息位SqNum存在于CAN报文的数据段中,每当重发一次心跳报文时,CAN报文的SqNum位就会进行一次自增运算,当SqNum位异常是则证明通信链路中断或通信信息异常。对于同一系列的CAN心跳报文,仅有心跳信息位不同,帧的其他位均无变化[6]。

图5 基于心跳机制的CAN数据帧格式
基于心跳机制的通信流程图如图6所示,充电过程开始,首先进行系统初始化确认需要通信的电动汽车,然后根据配置的通信地址建立充电桩与BMS通信连接,连接建立后实时传输充电过程中包含配置信息和各种电气参数的报文;通信过程中实时检测是否有新充电信息产生,当有新充电信息产生时,传输包含当前充电状况的报文信息,并将心跳信息位SqNum进行自增运算,当无新信息产生时,定时器进行计时操作,直至心跳报文间隔时间到达后发送心跳报文,并进行报文心跳信息位SqNum自增运算;监测充电是否完成,如果没有完成,则返回新充电信息检测环节循环执行,如果充电完成,则结束充电[7-9]。此通信逻辑可及时传输新产生的充电信息,并利用心跳报文的SqNum实时监测通信链路状态,可以做到在高效、节省带宽的前提下及时发现通信链路异常。

图6 基于心跳机制通信流程图
4 结论
本文针对电动汽车充电过程中BMS与充电桩之间通信异常导致车载电池过充的问题,提出了一种基于心跳机制的电动汽车充电CAN报文。该报文在传统车载CAN通信基础上与心跳机制相结合,通过心跳报文的方法实时对通信数据以及通信链路监测,能够及时发现通信过程中的问题,并采取相应应急措施,如通信重连或结束充电等,此方法可有效防止由于充电桩与BMS之间通信异常导致的车载电池过充问题的发生。
猜你喜欢
汽车电器(2022年9期)2022-11-07
移动通信(2021年5期)2021-10-25
空间科学学报(2021年6期)2021-03-09
汽车电器(2020年12期)2021-01-07
铁道通信信号(2020年4期)2020-09-21
空间科学学报(2020年3期)2020-07-24
上海电力大学学报(2020年3期)2020-07-02
电子制作(2019年20期)2019-12-04
中国外汇(2019年11期)2019-08-27
汽车电器(2018年1期)2018-06-05