基于变预测时域的电动汽车轨迹跟踪控制
2021-07-19 09:59刘溯奇安伟彪曾宪锋
科学技术与工程 2021年17期
刘溯奇,王 刚,安伟彪,匡 兵,曾宪锋,景 晖,2*
(1.桂林电子科技大学机电工程学院,桂林 541004;2.上海交通大学机械与动力工程学院,上海 200240)
轨迹跟踪控制研究[1-3]是自动驾驶技术中的关键一环,也是智能交通系统的重要组成部分,是自动驾驶是否能落地实施的关键。因此轨迹跟踪控制器在不同的道路工况和行驶工况下能否稳定精确地进行轨迹跟踪,对于自动驾驶安全行驶具有重要的意义和作用。
倪兰青[4]为了提高轨迹跟踪的精度和轨迹跟踪稳定性,提出了基于横摆角速度的路径跟踪策略,同时考虑了车辆质心侧偏角单独用传感器测量会有较大的噪声造成测量误差大,基于Kalman滤波器设计了实时估计出车辆的质心侧偏角和横摆角速度的估计器,同时针对二次型高斯最优控制器(linear-quadratic-Gaussian,LQG)稳定性的不足,改进了LQG/LTR控制器,通过仿真结果表明了算法的有效性。但该方法中采用的横向预瞄误差为近似值,同时未对车辆进行纵向控制,在极端工况下轨迹跟踪的精度和稳定性会降低。马迪[5]针对采用非完整约束的运动学模型不能处理车辆行驶过程的稳定性问题,基于魔术公式在控制器中加入轮胎侧偏角约束,运用粒子群算法模糊控制器参数进行优化。通过仿真结果表明在一定工况下,能够良好地保证车辆轨迹跟踪的稳定性和精度。但由于控制器采用的车辆模型仅考虑侧向动力学,假定了车辆行驶只工作在轮胎线性区域,因此在实际复杂工况下(速度变化大、轮胎在非线性区域工作等)易造成轨迹跟踪失败,导致安全事故。卢山峰[6]基于模型预测控制(model predictive control,MPC)设计了轨迹跟踪控制器,依据控制器参数对轨迹曲率和轨迹偏差影响的结果,对道路曲率和跟踪偏差建立了模糊控制规则,根据车辆的跟踪状态实时输出相应的预测时域参数,实现了轨迹跟踪的自适应控制,通过仿真验证了在不同道路曲率下,改进后的控制器提高了跟踪的精度和稳定性,但由于该仿真和试验只考虑了固定车速下的轨迹跟踪控制,实际在变速下轨迹跟踪控制自适应性可能降低,导致跟踪精度和稳定性下降。
针对以上轨迹跟踪在不同工况下轨迹跟踪自适应性变差的问题,首先依据MPC具有良好的自适应性和鲁棒性等特点[7-10],基于MPC设计轨迹跟踪控制器,结合预测时域分析车速对轨迹跟踪控制的影响,设计基于变预测时域的轨迹跟踪控制器,最后通过仿真测试改进后的轨迹跟踪控制器的有效性。
1 车辆动力学模型搭建
建立如图1简化的动力学模型。由牛顿第二定律得到车辆质心绕x、y、z轴的动力学方程。
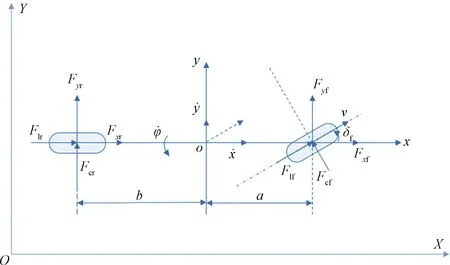
图1 简化的动力学模型
沿车辆x轴方向的纵向动力学方程:

(1)
沿车辆y轴方向的侧向动力学方程:

(2)
沿车辆z轴方向的横摆力矩平衡方程:
(3)
式中:m为车辆质量;x为车辆的纵向位移;y为车辆运动的侧向位移;φ为航向角;Flf为前轮纵向力;Flr为后轮纵向力;Fcf为前轮侧向力;Fcr为后轮侧向力;δf为前轮转向角;Iz为转动惯量;a为前轴到车辆质心的距离;b为后轴到车辆质心的距离。
车辆在惯性坐标系O-XYZ与车辆坐标系的运动学平衡方程为
(4)
轮胎的所受的纵向力Fl和侧向力Fc为
(5)
式(5)中:Fz为车辆4个轮胎的垂直载荷;s为滑移率;μ为路面附着系数;α为轮胎侧偏角。
为了简化模型,忽略车辆前后轴载荷转移造成的载荷变化,则Fz表示为
(6)
式(6)中:Fzf为车辆前面两个轮子受到的垂直载荷;Fzr为车辆后面两个轮子受到的垂直载荷。
滑移率s的定义为
(7)
式(7)中:v为车辆纵向速度;wr为轮胎转速;r为轮胎滚动半径。
轮胎的侧偏角α定义为
(8)
式(8)中:vc为轮胎横向速度;vl为轮胎纵向速度。
考虑到车辆正常运动过程中,车辆轮胎的侧偏角和轮胎的滑移率变化幅度较小,为了更方便表示,采用线性关系表述轮胎的纵向力和侧偏力,即
(9)
(10)
式中:Clf、Clr为前后轮纵向刚度;sf、sr为前后轮的纵向滑移率;Ccf、Ccr为前后轮的侧偏刚度。由以上方程得到车辆动力学方程为
(11)
2 控制器设计
将式(11)车辆动力学方程写成非线性动力学微分方程,即
(12)
基于非线性预测模型虽然控制精确,更符合实际的控制原理,但由于采用非线性控制需要经过复杂的运算处理,大大增加了运算负担,在长时间的工作下,难以保证控制器的实时性、稳定性以及轨迹跟踪的安全性。因此,基于线性化的预测模型进行轨迹跟踪控制器的设计,这样既保证了求解的方便,同时有效减少了运算器的负担,能够应用到实际应用中。
对式(12)进行线性化处理,得
(13)
将式(13)整理得
(14)
式(14)中:d(t0)=ξ(t0)-A(t0)ξ-B(t0)u(t0)。
根据上述步骤得到了线性化的状态空间方程。由于该线性化后的方程是连续的,需要进行离散化处理才能运用到实际控制器设计中。采用的离散方法为前向欧拉离散方法,表达式为
(15)
式(15)中:I为单位矩阵;T为采样周期。
上述离散化后的状态空间方程一般形式为
(16)
参看文献[10]中预测模型的设计,将式(16)写为
(17)
式中:具体参数表达式为

在预测时域Np内,模型的输出表示为
(18)
为了实现车辆的轨迹跟踪,同时进行最优求解,产生最优控制量,设计如下目标函数:
(19)
式(19)中:Np、Nc分别为预测步长和控制步长;Q、R、S、ρ分别为跟踪误差、控制增量、控制量和松弛因子权重系数;目标函数第一项作用是让车辆的实际轨迹跟踪期望轨迹;第二项作用是在控制时域Nc内调节控制量的变化幅度,可以用来防止控制量大幅度变化造成的抖动;第三项作用能够用来调节控制量变化快慢;最后一项的作用是防止出现无解的情况,用软约束产生的次优解作为最优解。
对于式(19)类型的目标函数,若是直接去求最优解,则需要耗费大量的计算机计算时间,同时极大增加了控制器的负载,因此为便于计算机求解,需要对式(19)转化为标准二次规划形式(QP)。
经过假设和推导,式(19)转化为如下标准二次型:
(20)
式(20)中:
(21)
式(21)中:Qe为输出量的权重矩阵;Se为控制量的权重矩阵;ε为松弛因子,防止系统执行过程中出现没有可行解的情况。
由于目的是要转化为标准的二次规划形式,则将Pt看作常数项省略掉,得
(22)
通过控制前轮转向机构实现对轨迹的跟踪,考虑到转向机构的执行能力,对每个周期内的转角增量和总输入转角做如下约束:
(23)
至此,目标函数约束设计完成。通过在控制器每个控制周期内产生一系列最优变量,并将产生的最优量的第一项作为最优解,即
ΔU(t)=[Δu(t),Δu(t+1),…,Δu(t+Nc-1)]
(24)
将式(24)中产生的最优向量第一项作为最优变量作用于系统,也即最终的控制量为
u(t)=u(t-1)+Δu(t)
(25)
3 仿真分析
首先,分析不同恒定车速度和不同预测时域Np对轨迹跟踪效果的影响,然后通过CarSim和MATLAB/Simulink联合仿真测试改进后的轨迹跟踪控制器的性能。
3.1 车辆行驶速度对轨迹跟踪控制影响仿真分析
为了分析在不同恒定车速度下,不同的预测时域Np下对轨迹跟踪的影响,通过分析在同一定速度下,分析不同预测时域Np对轨迹跟踪的影响;仿真实验在不同定速度下进行了2组仿真测试,分别是36、90 km/h下进行不同恒定预测时域下轨迹跟踪的效果,其中预测时域Np采用了4组,分别为8、14、20、26。车辆模型参数如表1所示。车辆轮胎与路面附着系数设置为0.8;仿真的工况为双移线工况,目标轨迹和目标航向角如图2所示。
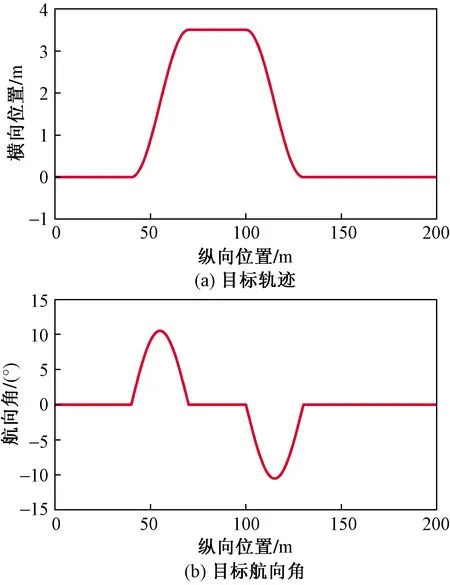
图2 目标轨迹和航向角
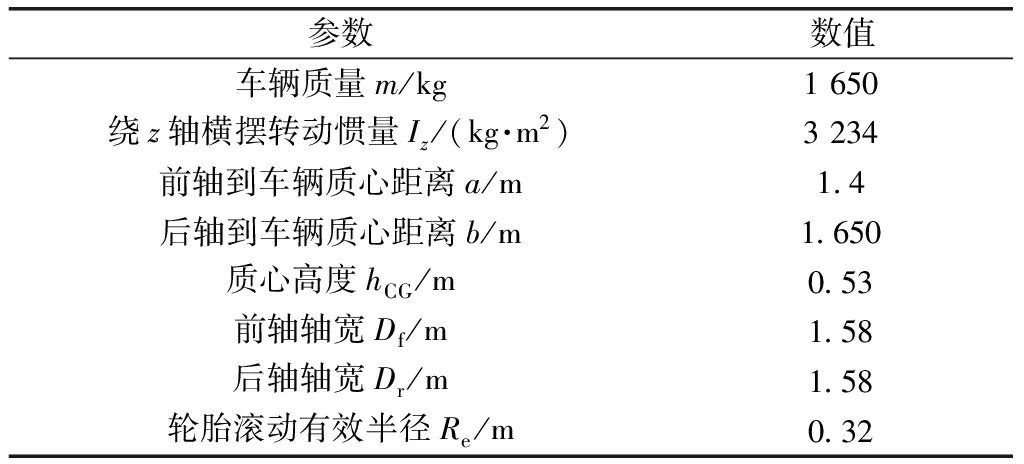
表1 车辆模型参数
车速36 km/h轨迹跟踪仿真结果如图3、图4所示,由图3知,轨迹偏差在预测时域为8时最小,且跟踪过程平稳,无超调;预测时域由8到26过程中,发现随着预测时域Np的增大,轨迹跟踪偏差加大,这是由于随着预测时域的增大使得预瞄距离变长,在较低车速下,车辆实际轨迹响应期望轨迹变慢,使得轨迹跟踪偏差加大。由图4可知,36 km/h车速下采用不同预测时域下轨迹跟踪过程中车辆的质心侧偏角和横摆角速度变化正常。
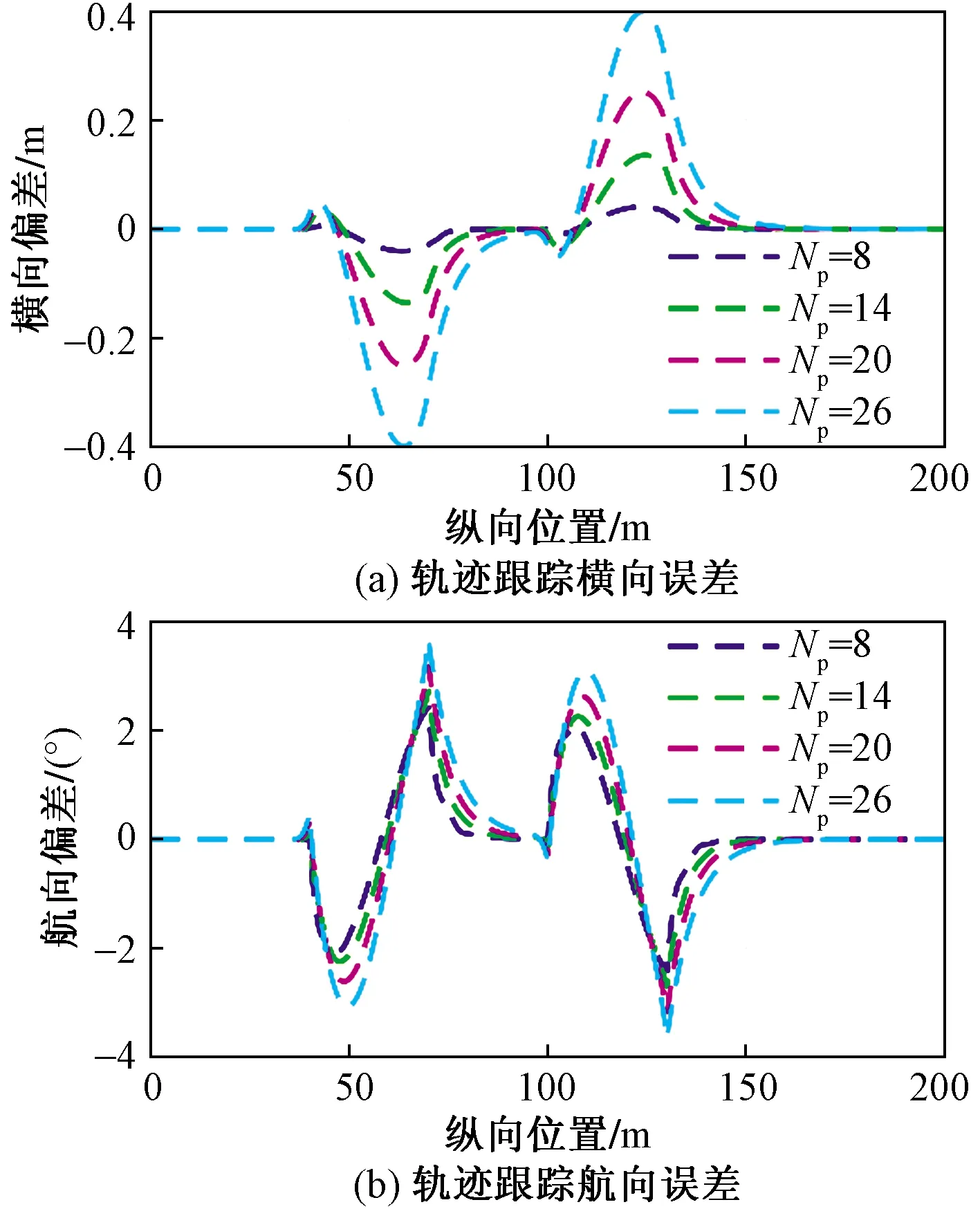
图3 车速36 km/h下轨迹跟踪横向和航向误差
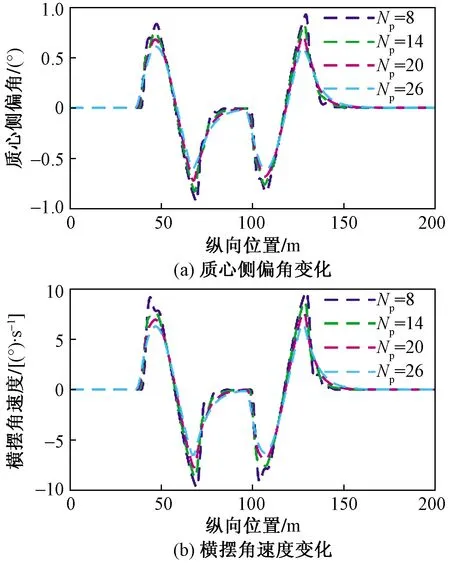
图4 车速36 km/h下车辆质心侧偏角和横摆角速度变化
车速90 km/h轨迹跟踪仿真结果如图5、图6所示,由图5知,预测时域为8时,轨迹跟踪失败,实际的轨迹和航向已经完全脱离期望值,对应图6中其车辆质心侧偏角在纵向位移大约75 m处远远超出行驶的安全范围,表明车辆已经失去稳定性;在预测时域为14时,车辆轨迹跟踪横向误差较小,但对应其航向跟踪误差大,对应其质心侧偏角和横摆角速度在60~80 m处于大的范围内波动,判断车辆在60~80 m处于危险状态;预测时域为20时,其轨迹跟踪误差和航向误差较小,对应其质心侧偏角和横摆角速度变化平滑、自然,具有较好的跟踪精度和稳定性;在预测时域为26,相比预测时域为20,其期望轨迹和期望航向跟踪误差较大,且存在一定的跟踪滞后,控制效果不如预测时域为20的效果好。
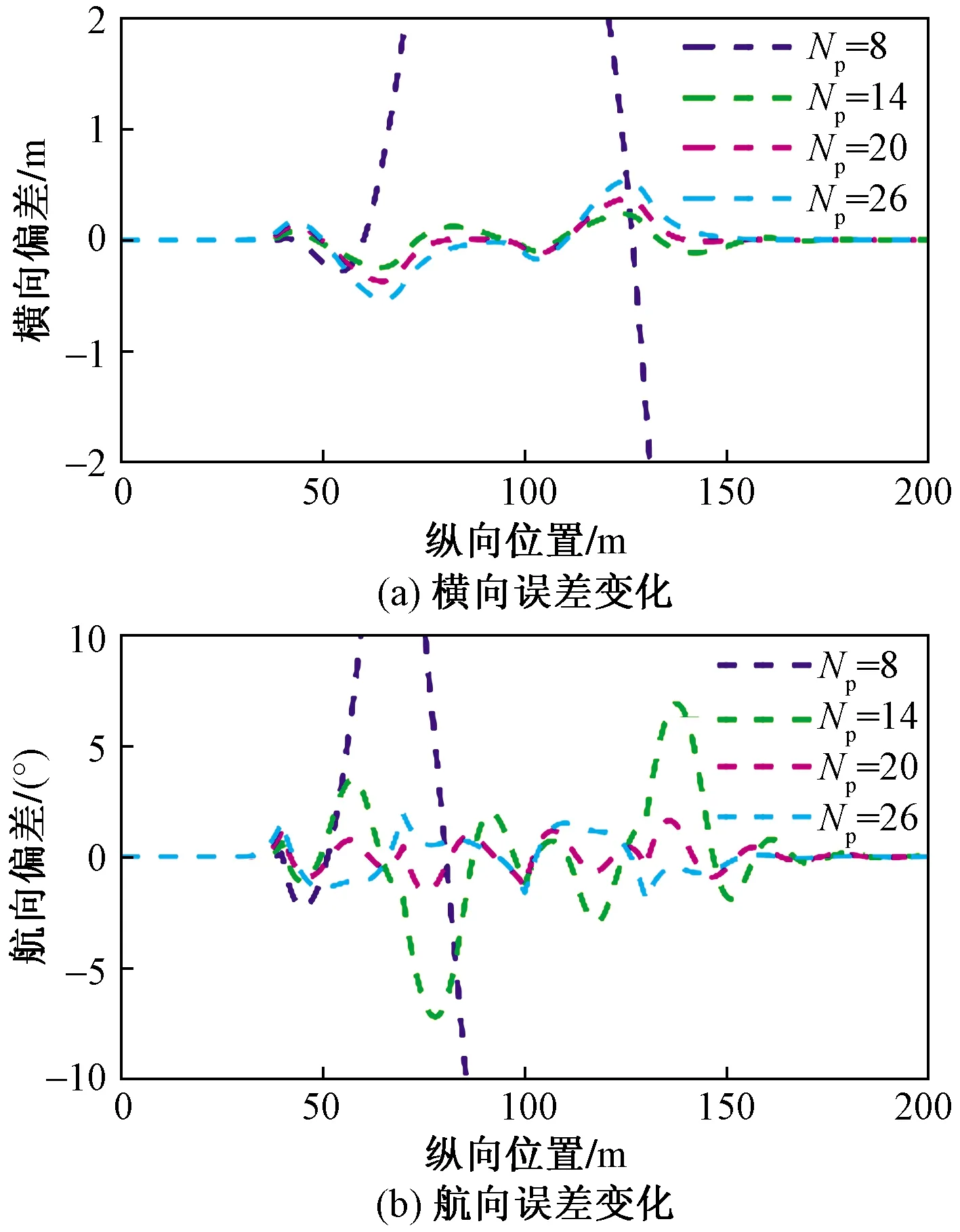
图5 车速90 km/h下轨迹跟踪横向和航向误差
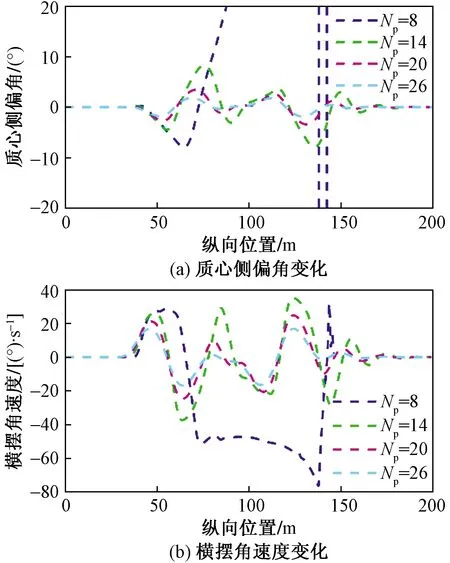
图6 车速90 km/h下车辆质心侧偏角和横摆角速度变化
3.2 基于变预测时域的轨迹跟踪控制器的设计和仿真分析
通过对比上述不同预测时域对应不同定速下轨迹跟踪仿真分析发现,在低速下,轨迹跟踪控制器采用小的预测时域轨迹跟踪精度高,车辆行驶的稳定性也良好。在高速运动下,轨迹跟踪控制器采用大的预测时域能够较好地跟踪期望轨迹,具有良好的轨迹跟踪稳定性。由于实际车辆轨迹跟踪变化过程中,会受到各种各样的影响,车辆会进行加速或减速运动,使得车辆速度处于一直变化的过程中。如果采用恒定的预测时域,无法满足低速、高速状态和变速度下的轨迹跟踪要求。因此,为了提升轨迹跟踪控制器在不同速度下的自适应,根据当前车辆速度实时地更新预测时域Np的值。
图7为基于变预测时域的轨迹跟踪控制策略图,其中系统误差模型、系统约束、目标函数构成模型预测控制器,根据车辆的初始状态、未来参考轨迹变化,输入给模型预测控制器,控制器产生控制量输入给CarSim车辆模型控制车辆轨迹跟踪,CarSim车辆模型的车速状态反馈到预测时域控制器,预测时域控制器根据车速产生相应的预测时域Np输入给MPC模型预测控制器,实时更新预测时域,由此形成基于变预测时域的轨迹跟踪控制器(以下称为改进后的轨迹跟踪控制器)。
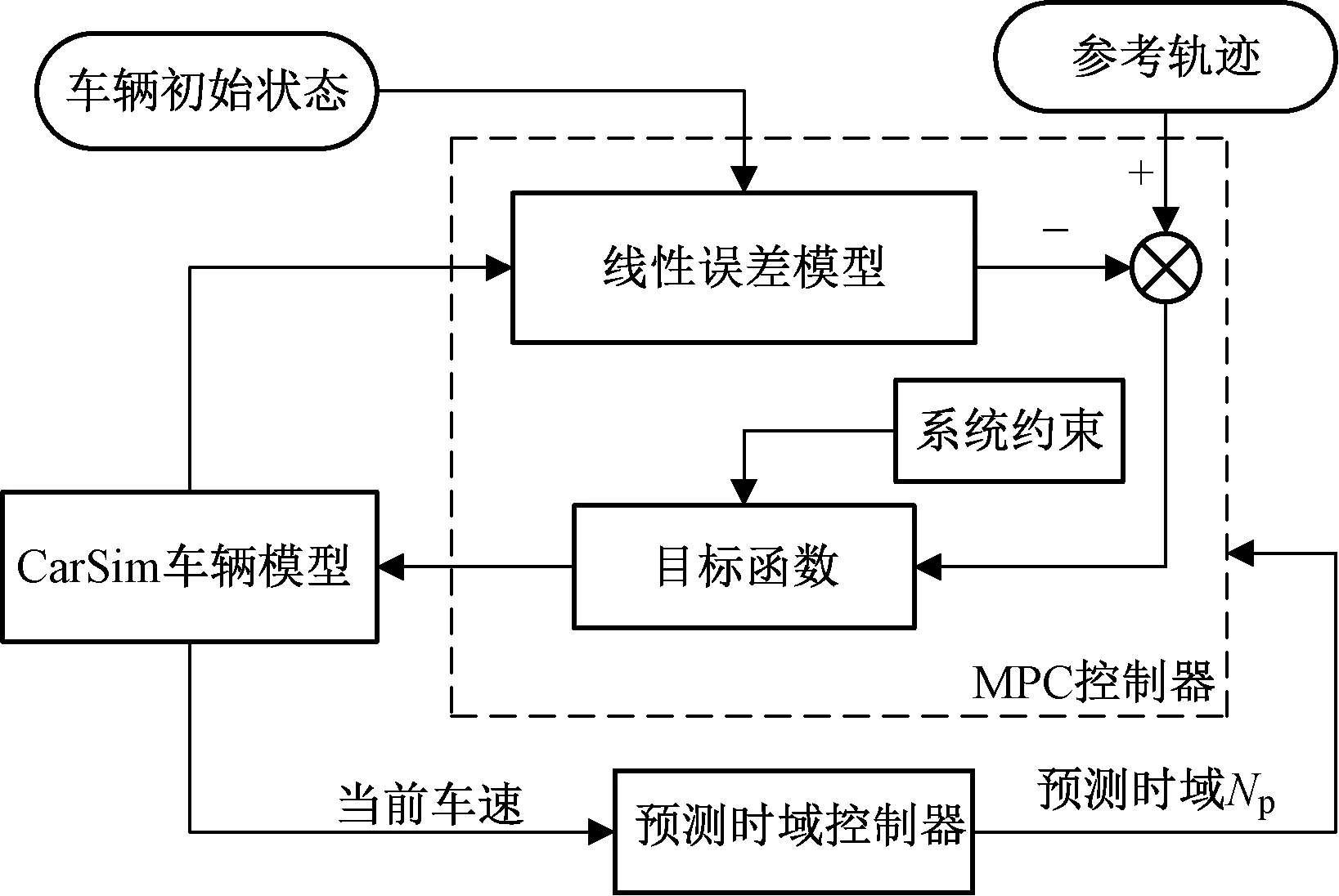
图7 基于变预测时域的轨迹跟踪控制策略
由3.1节中车速对轨迹跟踪控制的影响仿真分析,选取2组速度下对应的预测时域作为预测时域控制器设计的基准,如表2所示。考虑到车辆在低速下,控制器采用预测时域8时,控制效果较好;在高速采用大的预测时域,车辆轨迹跟踪稳定性较好,但过度增加预测时域的值会加大控制器的运算负担,使得控制器的实时性降低,存在安全隐患。因此,综合考虑轨迹跟踪的精度和稳定性,以及高速下控制器的实时性要求,最小预测时域选为8,最大预测时域为30;具体是通过选取的4组参数通过在MALTAB中进行3次多项式拟合取整得到,具体预测时域控制律如式(26)所示,获得如图8的预测时域控制器计算不同车速下对应的预测时域图,其中4个蓝色圈为表3中的4组参数,可以看出拟合并取整后的曲线能够很好地代表4组参数。
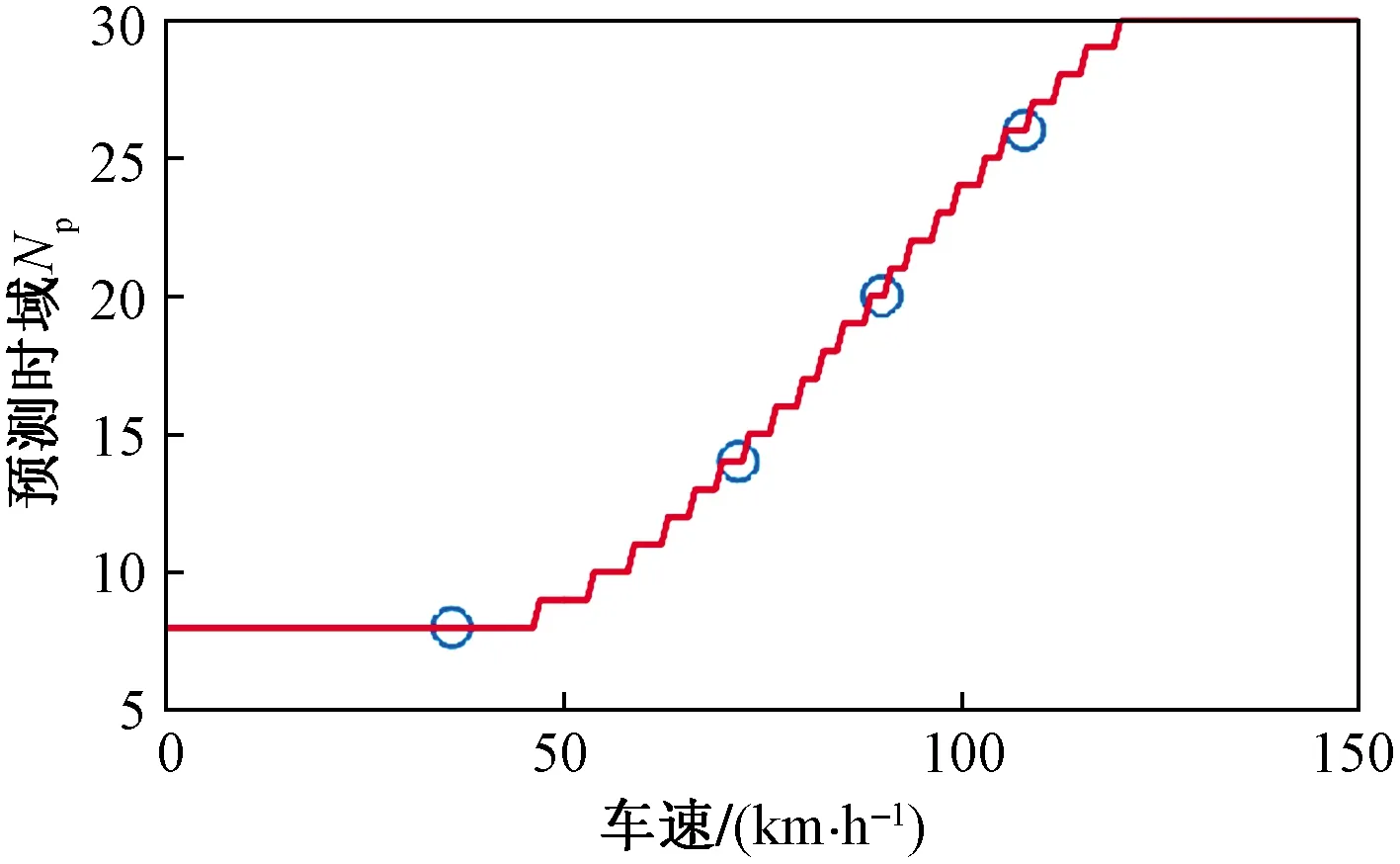
图8 不同车速下对应的预测时域Np

表2 不同车速下对应的预测时域Np
预测时域控制律具体如下:
(26)
为了更贴合实际超车过程以及更好测试改进后的轨迹跟踪控制器的性能,车辆变加速进行轨迹跟踪,轮胎与路面之间附着系数为0.8;并对比之前采用4组恒定预测时域的轨迹跟踪控制器的跟踪效果,车辆的参数和控制器参数与上述仿真中一致。
图9为不同预测时域Np前轮转角变化对比和行驶车速,其中,改进后的轨迹跟踪控制器对应仿真结果命名为“自适应”。图10为不同预测时域Np轨迹跟踪和行驶航向对比,由图10知,在预测时域为8和14,分别在纵向位移大约120 m和150 m处轨迹跟踪出现大偏离,轨迹跟踪失败,原因是车辆运动过程中车速随着纵向位移的变化不断增加,使得车辆动力学特性发生较大变化,轨迹跟踪控制器为了能够跟踪期望轨迹和参考航向,产生大的前轮转角,使得车辆质心侧偏角发生急剧变化,车辆行驶稳定性快速降低,使得车辆不能响应期望的转角,造成轨迹跟踪失败。由图11可知,预测时域为8和14,在纵向120 m处和150 m处,采用预测时域8和14的质心侧偏角已经处于安全范围之外,此时车辆已处于失稳状态,验证了上述失稳的原因。
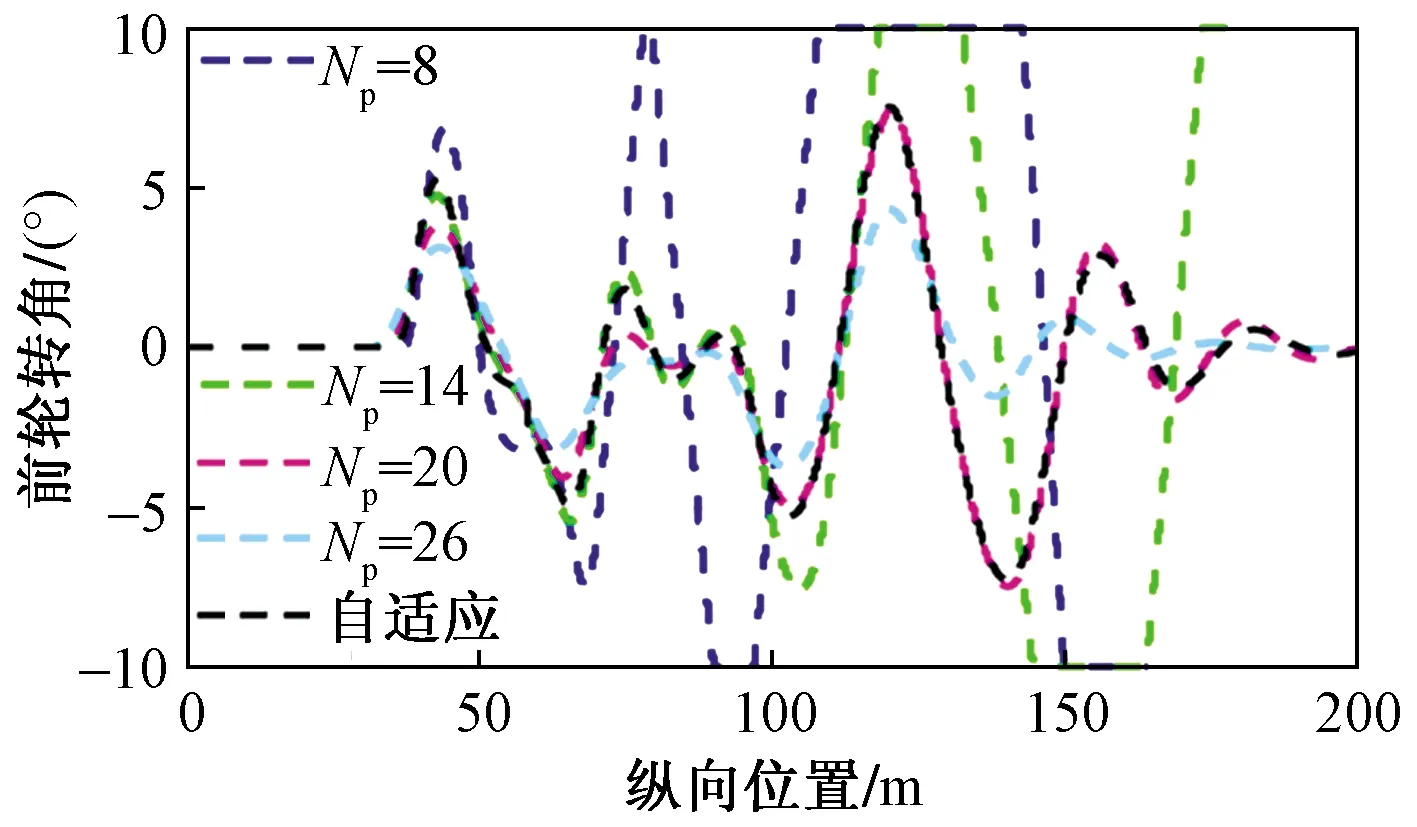
图9 不同预测时域前轮转角对比
由图10可知,分析对比控制器采用预测时域为20、26、自适应,发现采用自适应的预测值的车辆行驶轨迹偏差最小,对应航向偏差较小;预测时域为20的跟踪航向偏差与自适应基本一致,但其行驶轨迹偏差较大;预测时域为26的行驶航向偏差在高速时最小,但行驶轨迹偏差很大,这也说明了高速时采用大的预测时域值,车辆稳定性较好,但代价是行驶轨迹偏差大。
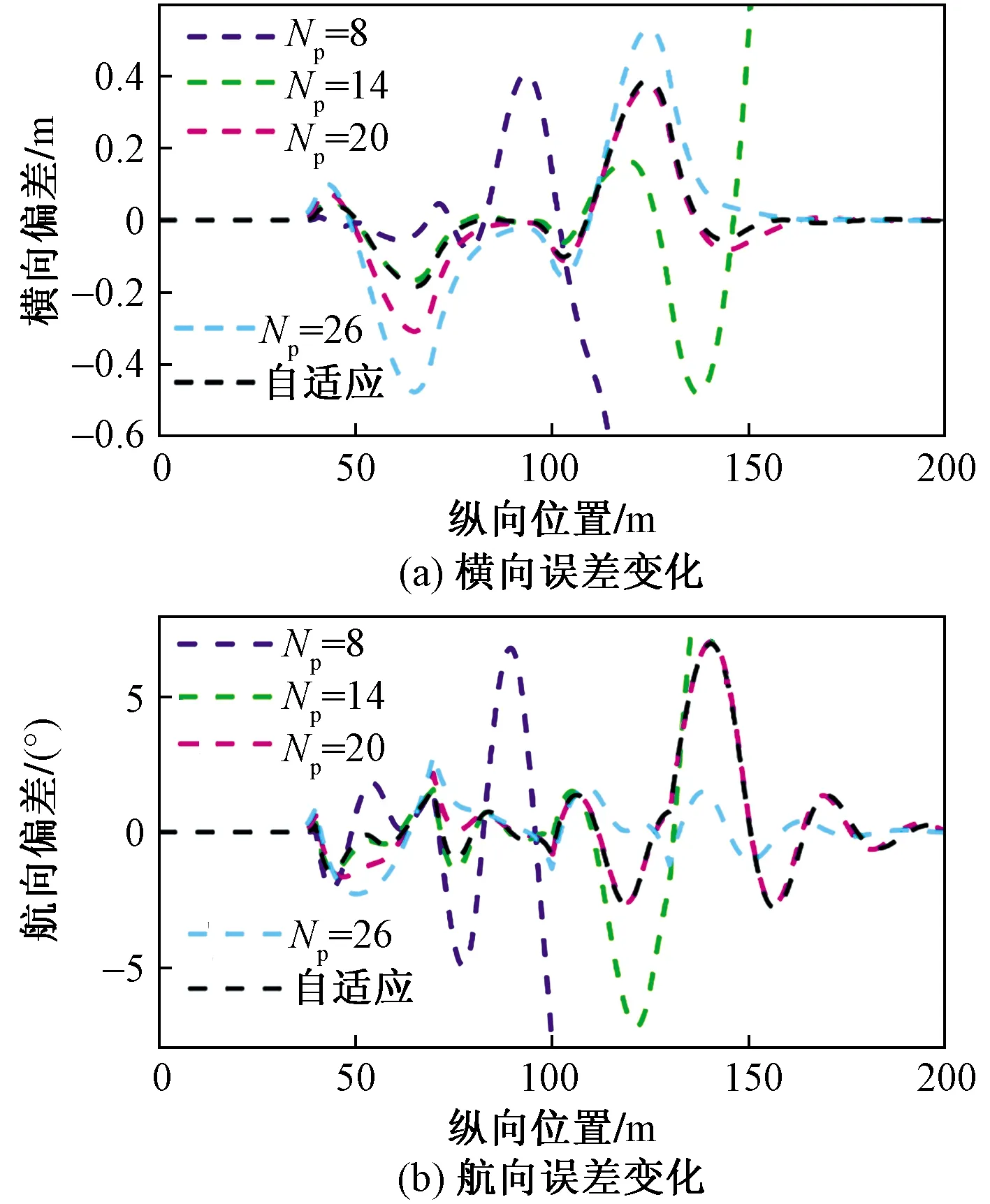
图10 轨迹跟踪横向误差和航向误差对比
由图11发现采用自适应的车辆质心侧偏角和横摆角速度变化平滑自然,说明车辆轨迹跟踪过程稳定;图12为变速下自适应预测时域变化,可以看出随着车速的变化,自适应预测控制器实时更新预测时域,增强了轨迹跟踪控制器在不同车速下的自适应性。由以上分析说明了改进后的轨迹跟踪控制器在兼顾车辆行驶稳定性的前提下,提升了轨迹跟踪精度;而采用预测时域为26的轨迹跟踪控制器,其航向偏差处于较小波动,但其轨迹跟踪横向误差大,在实际应用中存在问题。

图11 车辆质心侧偏角和横摆角速度变化
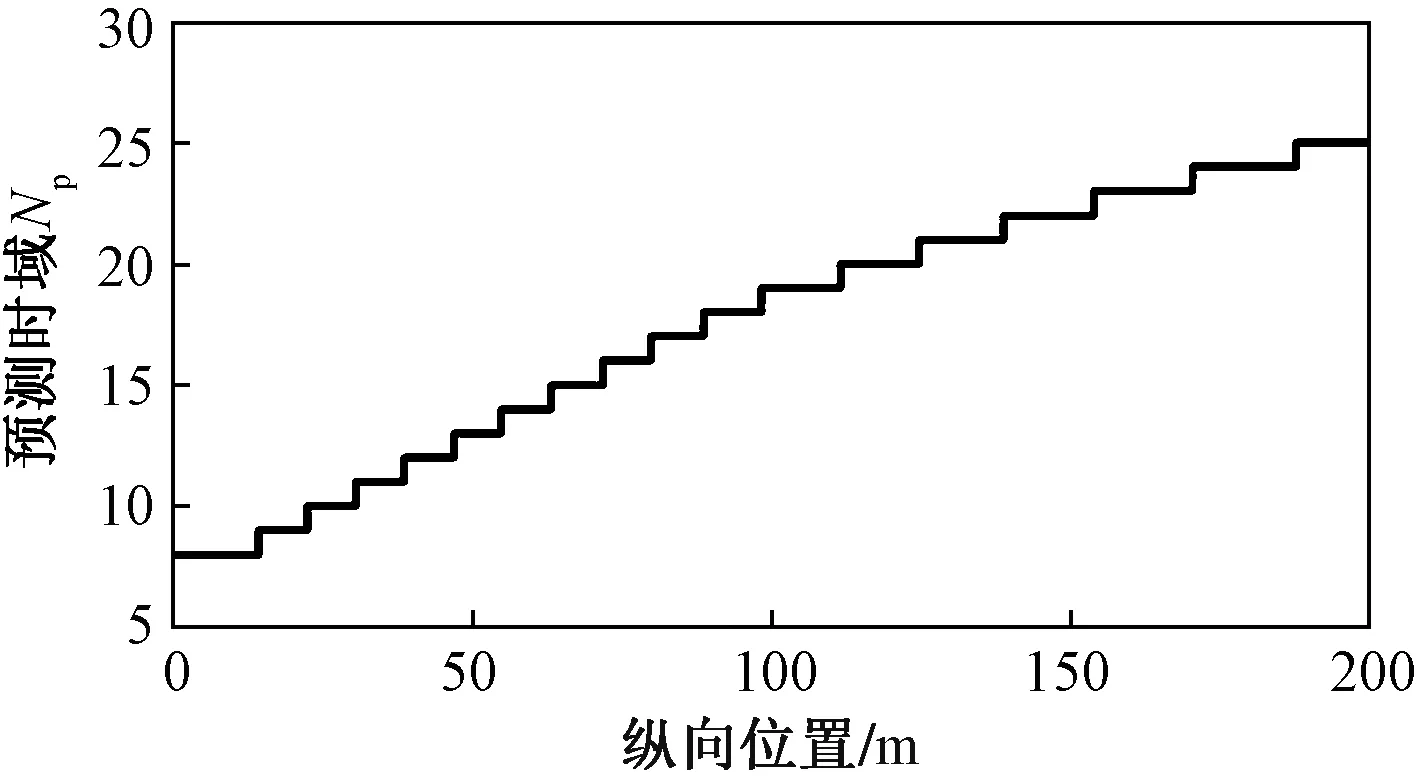
图12 预测时域的变化
4 结论
采用大预测时域的轨迹跟踪控制器能够增加车辆行驶的稳定性,但车辆处于较低车速时,采用大的预测时域使得轨迹跟踪横向偏差加大,也大大地增加控制器的运算负担,降低实时性。采用小的预测时域,在车速较低时具有较好的跟踪效果;但实际中应用中,加速减速的工况使得车速变化幅度大,采用小的预测时域使得车辆轨迹跟踪稳定性下降。而自适应预测控制器能够实时根据车速的变化,实时产生预测时域。通过仿真结果分析表明,改进后的轨迹跟踪控制器既满足了车辆低速行驶下的轨迹跟踪精度,也一定程度上克服了高速下车辆容易失去稳定性的问题。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
科技与创新(2021年24期)2022-01-03
北京航空航天大学学报(2021年4期)2021-11-24
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
电子技术与软件工程(2019年8期)2019-07-16
中学生数理化·教与学(2019年5期)2019-06-06
民用飞机设计与研究(2019年4期)2019-05-21