基于模糊PID技术的排气压力精确控制仿真研究
2021-07-19 01:18:54姜文雍黄增阳
农机使用与维修 2021年7期
姜文雍,黄增阳,毛 方,刘 毅
(1.衢州职业技术学院 机电工程学院,浙江 衢州 324000;2.衢州市质量技术监督检测中心,浙江 衢州 324000;3.哈尔滨华德学院,哈尔滨 150025)
0 引言
空气压缩机是一种通过压缩空气体积提高气体压力能的装置,有“通用机械”之称,其用途极广,在各行各业中都得到广泛应用。根据空压机相关产品标准规定及要求,空压机制造企业要对每台空压机做能源效率和容积流量的出厂检测[1]。排气压力是空压机性能检测的一个重要影响因素,在实际检测过程中,由于脉动的存在导致排气压力产生波动较大,进而影响空压机容积流量、能源效率等性能指标的准确测量,因此如何提高压缩气体压力自动调节的精确度始终是一个技术难题[2]。本文结合空压机能源效率快速检测的特点,并基于模糊PID控制原理,对空压机能源效率快速检测装置的排气压力控制系统进行设计及仿真研究,以期实现对排气压力的精确控制。
1 模糊控制的基本原理
模糊控制是以模糊数学为理论依据的一种自动控制系统,能够模拟人类的模糊推理以及决策过程。模糊控制并不需要建立具体的控制系统模型,只要将控制对象模糊化,再将专家的实际工作经验编成模糊控制规则,然后根据这些规则来控制系统。模糊控制的原理框图如图 1所示[3]。

图1 模糊控制原理图
模糊控制器根据输入变量的数量可以分为一维模糊控制器、二维模糊控制器以及三维模糊控制器等。模糊控制器输入变量多则控制精度高,但是同时也会导致模糊控制规则增多,使控制程序变的复杂。因此,本文选择二维模糊控制器(图2),以误差和误差变化率作为模糊控制器的输入。这样既能获得不错的控制效果,也较容易在计算机上实现。
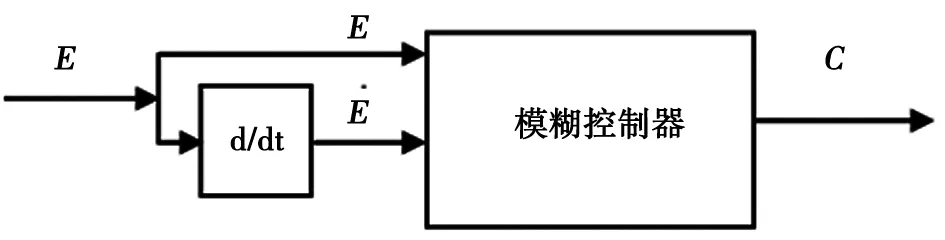
图2 二维模糊控制结构简图
2 排气压力的控制问题
传统PID控制技术具有结构简单、易于实现等优点,所以目前多数工业过程控制中广泛使用的还是传统PID控制技术。但是由于空压机排气压力控制是一种非线性系统,传统PID控制技术的控制效果并不理想。模糊控制的优点是稳定性强,而且适应性较好,但是有对稳态误差反应慢、控制精度低等缺点[4]。因此,为了兼顾以上两种控制方法的优点,实现排气压力的精确控制,本文选择了模糊PID 控制技术,模糊PID控制器由模糊控制器和PID控制器组成。
空压机能源效率快速检测装置的排气压力控制系统原理如图 3所示。

图3 排气压力控制系统原理图
缓冲器中压缩气体的压力值由压力变送器测得后传输到模糊PID控制器中,后者先计算出测量压力和设定压力之间的差值E以及差值变化率EC,然后再根据模糊控制规则控制电磁阀动作,从而实现对排气压力精确实时控制。
3 模糊PID 控制器设计
压力变送器测量到的压力与设定压力之间的差值E以及差值的变化率EC作为模糊PID控制器的两个输入值,其取值范围均为[-3,3],模糊子集为{NB,NM,NS,Z,PS,PM,PB}。模糊PID 控制器的输出量为Δkp、Δki、Δkd,它们的模糊子集同样为{NB,NM,NS,Z,PS,PM,PB}[5]。在控制排气压力的过程中,模糊PID控制器持续监测差值E以及差值的变化率EC,然后根据模糊控制规则(表 1、表 2、表 3)以及式(1)~式(3),动态调整kp、ki、kd的数值[4]。模糊PID 控制器的结构原理如图 4所示[3]。

表1 Δkp的模糊控制规则表

表2 Δki的模糊控制规则表

表3 Δkd的模糊控制规则表

图4 模糊PID 控制器结构原理图
(1)
(2)
(3)

4 控制系统的Matlab仿真
本文使用Matlab软件的simulink模块对排气压力控制系统进行仿真,建立模糊PID控制仿真模型如图 5所示。

图5 模糊PID控制仿真模型
在Matlab命令窗口输入“fuzzy”,打开模糊逻辑编辑窗口,设置模糊控制器为2输入3输出的二维模糊控制结构,如图 6所示。
将模糊控制规则表 1、表 2、表 3输入到模糊逻辑编辑窗口中,编辑好模糊控制规则,得到Δkp、Δki、Δkd的输出曲面图如图6、图7、图8、图9所示。

图6 模糊逻辑编辑窗口

图7 Δkp输出曲面图

图8 Δki输出曲面图

图9 Δkd输出曲面图
5 结果与讨论
设置采样时间为20 s,并在第10 s时输入一个干扰信号,表示排气过程中出现的压力脉动现象。Simulink仿真结果如图 10所示。

图10 普通PID控制和模糊PID控制对比图
从仿真结果可以看出模糊PID控制的效果要优于普通PID控制。模糊PID控制不仅超调量小,而且能更快的达到平衡状态。当排气压力出现脉动的时候,模糊PID的控制效果也要优于普通PID控制。因此,空压机能源效率快速检测装置的排气压力控制系统采用模糊PID控制技术可以实现排气压力的动态稳定。
猜你喜欢
科学咨询(2020年53期)2020-03-19 07:41:46
商品与质量(2019年22期)2019-11-29 02:41:40
科学导报·学术(2019年44期)2019-09-10 22:25:45
电子制作(2017年17期)2017-12-18 06:40:54
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
工业设计(2016年7期)2016-05-04 04:02:44
工业设计(2016年7期)2016-05-04 04:02:17
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2015年11期)2015-08-22 08:50:38