
基于多传感器融合的智能电动轮椅模糊测距控制
2021-07-18 07:12包蓉祁镘潼杨司杰刘维勇
电子制作 2021年12期
包蓉,祁镘潼,杨司杰,刘维勇
(江苏师范大学电气工程及自动化学院,江苏徐州,221116)
0 引言
近年来,“人口老龄化”已逐渐成为社会发展趋势,在全球各地蔓延。最新的调查数据预测,中国老年人口所占比例将在2035 年左右超越30%,未来的30 年中国人口将继续加速老龄化,我国老年健康服务的需求将持续提升。而根据国家卫生部统计,60 岁以上患有慢性疾病的老年人以及伤残人员的概率是我国总人口患病率、伤残率的3.4 倍。肢体能动率较低的老人及残障人员在服务领域中备受关注,国内外技术人员借助先进技术,研发出各种满足多样化需求的智能养老服务产品。其中,电动轮椅就是研发应用的热点领域。基于传统电动轮椅,本文利用了传感器群检测环境的情况,应用多传感器信息融合技术[1],配合模糊控制算法将环境信息与提前收集的地图信息进行对照,实现安全地自动行驶、停止、避障。调整在斜坡、崎岖路面的安全性、稳定性。实现升降、减震、爬坡、驻坡、刹车。智能轮椅的服务产品将使老人生活更加便利、高效、高质量。
1 传感信息采集
■1.1 超声波测距原理
超声波测距传感器一般由两部分构成:超声波发生器与超声波接收器。
由压电材料构成的超声波发生器,在施加周期性电压信号后,呈现逆压电效应,将电信号转换为超声波信号发出;当超声波接收器接收到超声波时,会呈现正压电效应,将超声波转换为脉动电压信号。检测装置根据超声波发送到接收在空气中传播的时间t 与声速v,即可计算出电动轮椅与障碍物之间的距离。计算公式为:

公式(1)中:s 为智能轮椅与障碍物的间距;v 为超声波在基本阻力下的传播速度;t 为渡越时间。系统运算时,考虑空气中的温湿度变化和其他影响因素,可得到更精准的数值。相对于其他测距传感器[2],超声波不易受磁场、光线的影响。在黑暗、电磁场的不利环境下,仍能探测出透明或漫反射性差的物体,实时反馈信息处理。结合超声波传感器优势,选用12 个成本低、精度高、体积小的距离传感器模组PCR20D 按水平方向360°视野范围均匀分布在智能轮椅下部分,以减小超声波发射波束角与距离之间的误差变化。
■1.2 传感器选型与配置
双目视觉传感器将镜头上采集的光照像素陈列转换为电信号,再通过内部的A/D 转换器转为数字信号输出。DSP(数字信号处理芯片)及时快速地传到基带中并刷新感光芯片,可通过控制芯片,调整画面品质(色彩饱和度、清晰度等),减小系统误差。最终信号处理器ISP 将RAW DATA 数据进行对光感的分析,还原成三基色,呈现出图像。两个视觉传感器取得中心距T,沿着垂直方向同时成像于一个点P。由于视觉成像,P 点位置总呈现动态变化,即传感器间距存在着一定视差d,公式(1)可得。在已知镜头焦距的前提下,可通过相似三角形的原理将中心距T 与视差d 的差值比上深度Z 与焦距f 的差值等于中心距T 与深度Z的比值,从而解出智能轮椅到障碍物的实际距离Z,公式(2)所示。
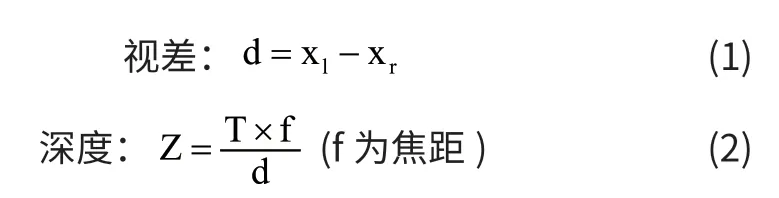
由于超声波传感器检测范围有一定局限性,控制间距在7m 左右,并且有几十毫米的最小探测盲区,仅仅适用于近距离环境的测量,不能提供远程障碍物的尺寸大小信息。所以采用超声波传感器与双目视觉的摄像头传感器的信息融合,将超声波传感器装至轮椅下部分距地37cm,主要集中于探测间距较小的障碍物。在双目视觉定位系统[3]中,两个COMS 视觉传感器同时进行采集图像,来模拟人眼功能。可以采用Philips 公司的COMOS 视觉芯片PCF8584,安装于智能轮椅手扶下侧20cm 处,其双目视觉与周围障碍物距离形成三角关系的测量,如图1 所示。通过其输出就可以估算整个周围环境的深度信息,深度信息可以帮助判断障碍物领域及安全领域,预测障碍物的运动轨迹并执行智能轮椅的下一步路线。
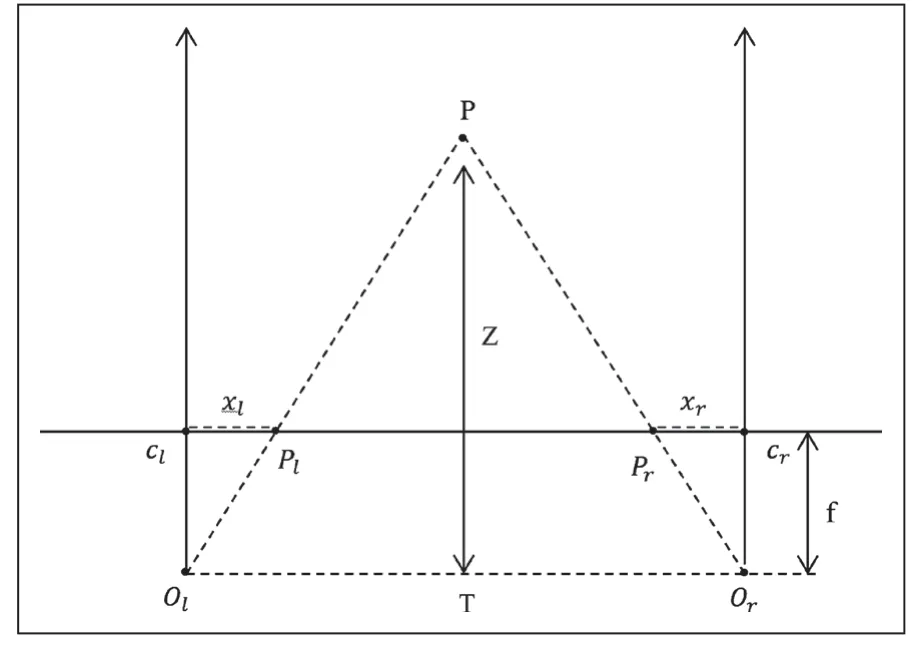
图1 双目测距原理
2 多传感器信息融合算法
假设一般状态方程:

传感器的观测方程:

公式(3)、(4)中,X(k)为环境周围障碍物k 时刻的状态向量;u(k)是k 时刻已知的输入量或控制信号;Ф(k)为状态转移矩阵;I(k)为输入控制加权矩阵;G(k)为过程噪声分布矩阵;H(k)为量测矩阵。经过两次观测v(k)、w(k)是高斯噪声向量。假设由摄像头传感器已知障碍物的位置与速度,可利用kalman 滤波器算法[4]对平面内障碍物进行跟踪,得到障碍物的真实运动轨迹、估计轨迹,与目标预测和更新的位置、速度方差。通过预测,改变轮椅位置从而避开障碍物。
3 最优路径规划
超声波传感器低处测距与双目视觉传感器高处测距的数据采集,超声传感器在低处的检测范围可达7m,利于距离近、体积小的障碍物检测,接收信息后快速躲避;双目视觉传感器在高处的检测范围较大,可设定最大距离为20m,利于判断距离远、体积大、速度恒定的障碍物,通过信息预测其运动轨迹,进行正常躲避。
在模糊控制系统中,选择偏差X,目标方向与当前方向的差值作为观测量,选取行驶的方向为控制量。输入量X 为轮椅与障碍物的间距,该论域划分为七部分,模糊语言描述Aj为{负远NB,负中NM,负近NS,零ZO,正近PS,正中PM,正远PB}。X 为负时,表示障碍物在智能轮椅正后方;X 为正时,表示障碍物在智能轮椅正前方,设定x 的取值范围为[-20,20]。如表1 所示。
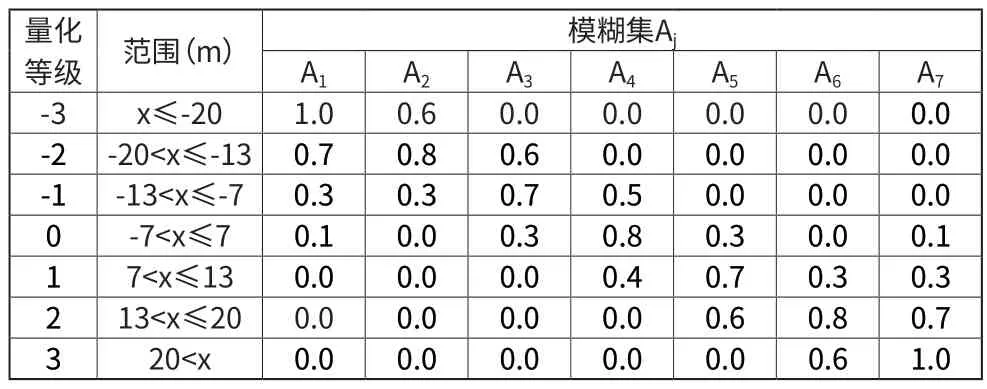
表1 x的量化等级和模糊集Aj的关系
输入量Y 为水平面垂直方向与障碍物形成的角度,该论域划分为七部分,模糊语言描述Bk为{正左PB,较左PM,偏左PS,正常ZE,偏右NS,较右NM,正右NB},设定y 的取值范围为[-90°,90°]。如表2 所示。

表2 y的量化等级和模糊集合Bk的关系
建立在论域X、Y 上的模糊集Ci={左转PB,左前PM,左后PS,前进ZE,右后NS,右前NM,右转NB}。由模糊集构成49 条多重多维条件语句 { if X Aj且Y Bk,then ZCi}(其中Z 为智能轮椅模糊控制的精准避障方向,设定控制量Z 的论域为[-3,3]),如表3 所示。

表3 模糊控制规则
考虑到实际A 和B 的输入量远远超过预测的论域范围,则自动选取相应的极值。在障碍物与智能轮椅的距离出现0m 时,若同时水平面垂直方向也为0°,这时智能轮椅应以正左或正右方向快速避开。在避开障碍物后,重新规划无障碍物的最优路线。若智能轮椅在障碍物正中,角度偏右的方向,考虑到智能轮椅与障碍物的体积空间半径,有很大概率相撞,则应以反方向左后方移动,差值越大,行驶越慢。在加速度增大与距离缓冲的作用下,智能轮椅逐渐偏离障碍物。根据表3 制定的模糊控制规则,可以得到智能轮椅与障碍物的距离与水平方向偏离角度之间的模糊关系Ri。
根据建立的模糊集,带入相应的隶属度矩阵,得到相应的模糊关系:
总的模糊关系:

最后再根据普通加权平均法将模糊控制向量的模糊判决进行清晰化。

4 结论
通过超声波传感器与双目视觉传感器检测智能电动轮椅周围情况,将检测信息与提前收集的地图信息进行对照。本文基于多传感器融合的融合算法卡尔曼滤波技术,预测速度恒变的障碍物运动轨迹,实现准确的障碍物位置的追踪,为提升电动轮椅的速度和安全性能奠定基础。在多重多维的角度下,实现模糊控制系统的自调整,通过模糊条件语句来描述变量间的简单关系,减小避障过程中目标方向的误差,实现更加精准地自动行驶、自动避障。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
农业工程学报(2022年8期)2022-08-08
青年文学家(2022年10期)2022-04-25
江苏农业科学(2022年6期)2022-04-15
动漫界·幼教365(中班)(2020年3期)2020-04-20
市场周刊·市场版(2019年55期)2019-12-08
创新作文(1-2年级)(2019年4期)2019-10-15
好孩子画报(2019年10期)2019-01-10
企业技术开发·下旬刊(2016年8期)2016-10-13
