一种用于旋转环境的无线激光数据传输模块设计∗
2021-07-16 14:04沈三民谭秋林庞俊奇
电子器件 2021年3期
谭 雯,沈三民∗,谭秋林,庞俊奇,杨 峰
(1.中北大学仪器与电子学院,山西 太原 030051;2.中北大学仪器科学与动态测试教育部重点实验室,山西 太原 030051)
在发动机转子高速旋转的状态下,需要采集叶片的温度和压力等测量参数对发动机性能进行研究。通常旋转部件测量数据的传输方式有集流器传输、无线射频传输和无线光传输[1-3]。但是集流器传输存在转速不高、成本大、易磨损和噪声大等问题[4]。作为集流器传输的替代方式,国内外研究了基于无线射频技术的旋转部件数据传输系统[5-9],如英国RotaData 公司基于无线射频技术设计了TeleMetry 转子参数遥测系统[10],国内李仙丽等人[11]设计了基于无线射频技术的发动机涡轮转子叶片动应力测量系统。无线射频传输存在频带带宽的限制,且容易受到电磁干扰,难以实现高速率大带宽的通信需求。
无线光传输具有体积小、质量轻、传输速率高、抗电磁干扰能力强、传输带宽大等优点[12],美国、欧洲、日本、中国相继开展无线光通信研究,目前商用的无线激光通信系统的通信距离可达几千米[13-17],但体积较大不适用于航空发动机转子的数据传输。本文主要设计基于无线激光通信技术的数据传输模块,用来实现发动机转子与地面之间的数据的传输。
1 方案设计
无线激光数据测量系统的组成如图1 所示。传感器采集参数并输出模拟信号,模拟信号经过A/D转换后,转换为数字信号送到FPGA,由FPGA 进行数据编帧,每一帧数据由帧头、副帧头和64 字节数据及帧计数、帧内行计数构成。数据从FPGA 以串行方式输出到激光数据传输模块。激光数据传输模块完成光信号和电信号的转化后通过FPGA 将数据传输到计算机进行处理。本文主要的工作是完成激光数据传输模块的设计。

图1 无线激光数据测量系统框图
激光数据传输模块分为发动机转子上的激光发射模块和地面的激光接收模块。发射模块由激光驱动电路和激光二极管组成。驱动电路驱动激光二极管发光,将数字信号转换为光信号发送到大气信道。接收模块通过光电探测器接收光信号转化为光电流输出,放大电路将光电流转换为电压信号输出。
1.1 安装结构
发射模块位于发动机转子轴部分,需要跟随转子一起进行高速旋转。因此将发射模块和接收模块设计为直径为5cm 的圆形发送板和接收板。并且将激光二极管和光电探测器安装在发送板和接收板的圆心处,保证旋转状态下激光二极管的光斑始终在转子的轴线上。
无线激光数据模块安装结构如图2 所示,激光数据发射模块包含四个安装孔,通过螺钉将发射模块固定在旋转套管和法兰上,使发射模块可以随发动机转子旋转。接收模块的四个安装孔通过螺钉固定在地面端。安装时保证激光器、发动机转子轴、光学天线和光电探测器的轴线重合,使发射模块和接收模块不会产生较大的轴向偏移,保证旋转环境下数据的正常传输。
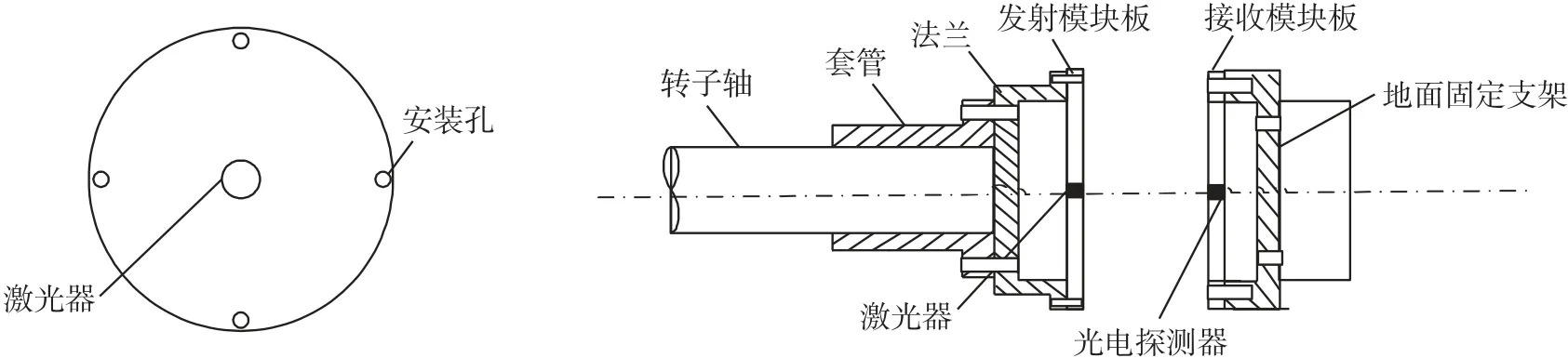
图2 激光电路板结构图和无线激光数据模块安装结构原理图
2 硬件电路设计
2.1 电源设计
为了实现发动机转子与地面间无接触的数据传输,无线激光数据传输模块采用无线充电的方式来提供电源,通过地面端电源向发动机转子端的发射模块和传感器电路提供5V 电压。由于激光驱动芯片需要3.3 V 电压,因此选用TI 公司的稳压芯片LM1117-3.3 将5 V 电压转换为驱动芯片所需的3.3 V电压。
2.2 发射模块设计
大气存在三个低损耗波长窗口为1 550 nm、1 310 nm 和850 nm,也是激光器最常选用的三个波长。发射模块选用850 nm 的近红外激光二极管。激光二极管选用TT Electronics 公司的850 nm 近红外光垂直腔面激光发射器(VCSEL)OPV310Y。VCSEL 是一种半导体激光器,具有阈值电流低、功耗低、出射光为圆形、能在较宽的温度范围和电流范围工作的特点。OPV310Y 的阈值电流最大为3 mA,工作电流为12 mA,峰值波长为850 nm,数据传输速率可达2.5 Gbit/s,光功率最小为1.5 mW。
2.2.1 驱动电路
MAX3669 是MAXIM 公司设计的激光驱动器芯片,数据传输速率为622 Mbit/s。MAX3669 内部带有自动功率控制回路(APC),可以补偿激光管随温度和使用寿命的改变而产生的阈值电流的变化。APC 回路会调整激光偏置电流,以使监视器电流与APC 设置电阻RAPCSET设置的参考电流匹配,从而控制输出的光功率稳定。当不需要APC 控制时,APCSET 引脚通过100 kΩ 电阻接地即可。MAX3669 通过设置最大偏置设置电阻引脚BIASMAX、调制设置电阻引脚MODSET、APC 设置电阻引脚APCSET 的电阻值设置调制电流和偏置电流给激光二极管。
已知激光二极管OPV310Y 的监视二极管电流为IMD=0.03 mA,阈值电流为Ith=3 mA,平均功率为1.5 mW,激光斜率效率η为0.6 mW/mA。可计算出峰峰值功率为Pp-p=2PAVG(re-1)/(re+1)=2.45 mW,根据峰峰值功率和斜率效率可计算MAX3669的调制电流为IMOD=Pp-p/η=4 mA,根据阈值电流和调制电流可计算MAX3669 的偏置电流为IBIAS=Ith+IMOD/2 =5 mA。MAX3669 的监测电流是0.03 mA,所以APC设置电阻RAPCSET为40 kΩ。由于MAX3669 的调制电流为4 mA,所以调制设置电阻RMODSET为40 kΩ。由于MAX3669 的偏置电流为5 mA,所以偏置设置电阻RBIAS为40 kΩ。驱动电路如图3 所示。

图3 MAX3669 驱动电路
2.3 接收模块设计
常用的光电探测器有光电二极管(PIN)和雪崩二极管(APD)。PIN 型光电二极管的成本低、灵敏度高、体积小、响应速度快、噪声低,常用于短距离通信。APD 相比PIN 具有更高的灵敏度,适用于接收功率低和需要更高灵敏度的系统。雪崩二极管选用FirstSensor 公司的AD500-8,峰值波长为850 nm,增益为45 A/W,截止频率为1 GHz,反偏电压为90 V。
2.3.1 反偏电压电路
电源供电电压为5V,APD 的反偏电压为80 V~120 V。为了使APD 正常工作,需要对电源电压进行升压。选用ADI 公司研制的APD 反偏开关电源芯片LT3482 来为APD 提供反偏电压。LT3482 输入电压为2.5 V~16 V,输出电压最高可达90 V,内部集成了电荷泵,大大减小了电源体积。具有确定的开关频率1.1 MHz,后续电路便于滤掉电源噪声干扰。∗SHDN 是芯片开关引脚,通过接入高电平使芯片使能。CTRL 是内部基准电压覆盖引脚,将CTRL 与VCC 相连,设定内部基准电压VREF为1.235 V。倍压器输出引脚Vout2与APD 输出引脚电压相同,输出电压Vout2=(1 +R1/R2)VREF,当R1取1 MΩ,R2取14kΩ 时,Vout2输出为90 V,则APD 引脚也输出90 V 电压,将APD 输出引脚与APD 阴极相连实现APD 的反偏。
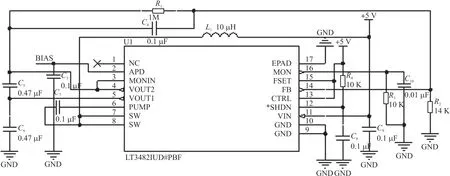
图4 APD 反偏电压电路
2.3.2 放大电路
光电探测器接收信号后输出的光电流较小,需要后级放大电路对信号进行放大处理。为了得到确定幅度的数字波形输出,选用两级放大电路。前级放大为跨阻放大,主要完成光电流转电压的功能。后级放大为限幅放大,将输出电压幅度调整为确定电平输出。跨阻放大器选用MAXIM 公司数据传输速率为622 Mbit/s 的MAX3665,输入灵敏度为500 nA,跨阻增益为8 kΩ。限幅放大器选用MAXIM 公司数据传输速率为622 Mbit/s 的 MAX3761,MAX3761 的输入灵敏度为4 mV。限幅放大器存在信号丢失指示(LOS)输出,当输入功率的模拟电压VRSSI低于设定阈值VTH=1.4 V 时,LOS 会启用静噪功能,数据输出引脚OUT+和OUT-的差分输出近乎为零,共模电压为VCC-0.8 V。
为了减小电源噪声对放大器的影响,光电二极管的基极引脚需对地接一个电容。接收电路如图5。
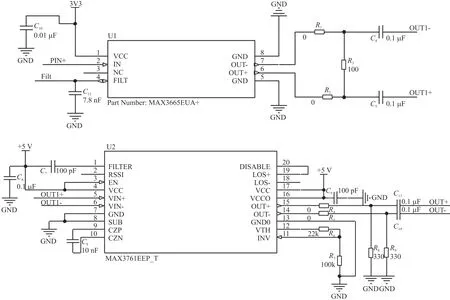
图5 放大电路
3 数据收发平台及实验测试结果
为验证所设计的数据传输模块的传输性能,搭建一个基于FPGA 的数据收发平台。实验平台能够循环产生递增的数据并将数据以特定的帧格式传送给激光发射模块。每一帧都由帧头EB90、副帧头805A、64 字节的数据和2 字节的帧计数和帧内行计数构成,数据以串行的方式发送给激光器。接收端收到数据后通过以太网传回计算机,通过软件将数据读出。
使用数据收发平台进行连续激光传输实验,通过电动机搭建了模拟旋转测试台,传输数据速率为18 Mbit/s,传输距离为50 cm,电动机转速为6 000 r/min。软件界面如图6 所示,在通信测试前需要设置好计算机的IP 地址。实验接收数据结果如图7所示,当帧头EB90 和副帧头805A 对齐后,每行数据从00 到F0 循环递增,帧计数和帧内行计数都准确无误。持续发送和接收800 MB 的数据,接收的数据均无误码出现。
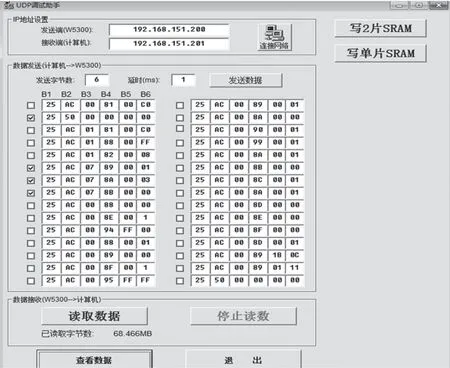
图6 软件测试界面

图7 数据接收结果
4 结论
本文设计了一种可用于发动机转子高速旋转状态下的无线激光数据传输模块,搭建了实验测试平台进行测试。在6 000 r/min 的转速和50 cm 的传输距离下完成速率为18 Mbit/s 的非接触数据传输实验,验证了该模块的可行性,解决了高速旋转环境下数据传输的问题,为涡轮机、发动机转子等旋转部件性能研究提供了可行的数据传输模块。
猜你喜欢
昆明医科大学学报(2021年6期)2021-07-31
锻压装备与制造技术(2021年2期)2021-07-19
无线互联科技(2021年4期)2021-04-21
科学(2020年5期)2020-11-26
小猕猴智力画刊(2019年3期)2019-04-19
小哥白尼(趣味科学)(2019年2期)2019-04-17
电子制作(2018年23期)2018-12-26
电子制作(2016年15期)2017-01-15
电子制作(2016年19期)2016-08-24
电子设计工程(2015年15期)2015-02-27