
回流式低速风洞试验段流场特性实验研究
2021-07-16 08:05胡丹梅陈云浩张开华张智伟
上海电力大学学报 2021年4期
胡丹梅, 陈云浩, 张开华, 张智伟
(1.上海电力大学, 上海 200090; 2.上海绿色环保能源有限公司, 上海 200433)
风洞实验室是以人工的方式产生并且控制气流,模拟飞行器或实体周围气体的流动情况,用来量度气流对实体的作用效果以及观察物理现象的一种管道状实验设备。这也是进行空气动力实验最常用、最有效的工具之一。大型风洞试验设备被视为国家的战略资源。由于建设风洞的目的就是要在风洞的试验段获得均匀、可控制的试验气流,满足模型气动力试验的要求,因此必须对流场静态和动态品质进行鉴定[1]。根据流速的范围分类,马赫数小于0.3的风洞称为低速风洞;马赫数在0.3~ 0.8范围内的风洞称为亚音速风洞;马赫数在 0.8~1.2范围内的风洞称为跨音速风洞;马赫数在1.2~5.0范围内的风洞称为超音速风洞;马赫数大于或等于5.0的风洞称为高超音速风洞[2]。低速回流式风洞广泛用于风速测量仪表的检测。风洞的流速下限能力、流场稳定性和均匀性以及紊流度是风洞重要的性能指标[3]。随着我国飞行器技术的迅速发展,研究人员对风洞的设计精度要求也越趋严格。因此,准确测量风洞的速度偏差度对低速回流式风洞研究至关重要[4]。
国外对风洞的研究较早。早在20世纪30年代前后,随着早期螺旋桨飞机的发展,为了研究飞行遇到的空气动力问题,发达国家开始建造大型低速风洞[5]。如美国建设了18.288 m×9.144 m的全尺寸风洞。ROBERT P J等人[6]在1995年第6届国际航空航天飞机和高超音速技术会议上提出两种乘波飞行器的低速风洞测试报告,分别从升力系数、阻力系数、升阻比、俯仰力以及稳定性方面对两种模型进行了比较。AHMED H H等人[7]利用烟雾将低速风洞转换成流动可视化风洞,观察风洞内的流场情况。
总的来说,目前国外对于大型风洞内流场的测量仍存在较大难度,基本都是通过仿真模拟等手段来进行测量。本文尝试通过一系列精密的皮托管来详细的测量风洞内各点的准确风速,进而得到整个风洞内流场的大致情况。
1 风洞结构和流场总体性能指标
1.1 风洞结构简介
上海电力大学风洞实验室建成的风洞属于低速回流式风洞,试验段为开闭两用,尺寸为1.4 m×1.4 m×0.31 m的矩形切角截面,长度为1.8 m。稳定段内采用1层蜂窝器和2层阻尼网进行整流,提高了试验段的流场均匀性,并降低了湍流度[8]。动力段采用风扇-止旋片构型风扇系统作为动力源,由12片桨叶和7片止旋片组成。收缩段的收缩比为 5.44,入口为方形截面,出口截面为矩形切角,收缩曲线选取常用的双三次收缩曲线[9]。低速回流式风洞整体结构示意[10]如图1所示。图1中数据单位均为mm。

图1 低速回流式风洞整体结构示意
1.2 流场总体性能指标
低速风洞流场校测的内容主要有:风速范围、动压稳定性(速度不稳定性)、动压场(速度场不均匀性)、局部气流偏角及湍流度等[11]。根据《高速风洞和低速风洞流场品质规范(GJB 1179—1991)》要求,本风洞的流场品质指标为:风速范围0.2~50 m/s,连续可调;速度偏差度μ≤0.3%。
2 实验测量方法与结果
2.1 流场横截面整体测量
由于风洞横截面是正方形切角截面,横向和纵向边长都为1.4 m,将四角忽略,其余部分12等分,将流速探头置于每个正方形中心点处。本次测试采用全截面动态风量自动标定装置(专利号:201821347819.5)及标准l型皮托管。主要利用皮托管原理将压差信号转化为流速信号,一次性将所有流速探头装入风道,采用计算机自动读取计算,自动修正皮托管系数,实时显示管道内平均风速、流量及流场分布状况。在风洞内布置测试点,将传感器探头安装于测量杆上,长杆每根1.35 m,短杆每根0.8 m。将12个传感器有序置于其中并记录下位置。最后将传感器接入测试仪器,分别对应标号,测量其中心的流速、温度,忽略四角的3个三角形。每两个测试点间相距0.35 m,两侧及上下离壁0.175 m。此外,由于风洞实验中数据质量的高低是由实验数据不确定度量值的大小来评定的,因此数据不确定度评估是整个风洞实验过程的关键。通过控制实验数据的不确定度来保证实验的可信度[12]。流速测量仪器安装照片示意及风洞横截面流场区域编号如图2所示。
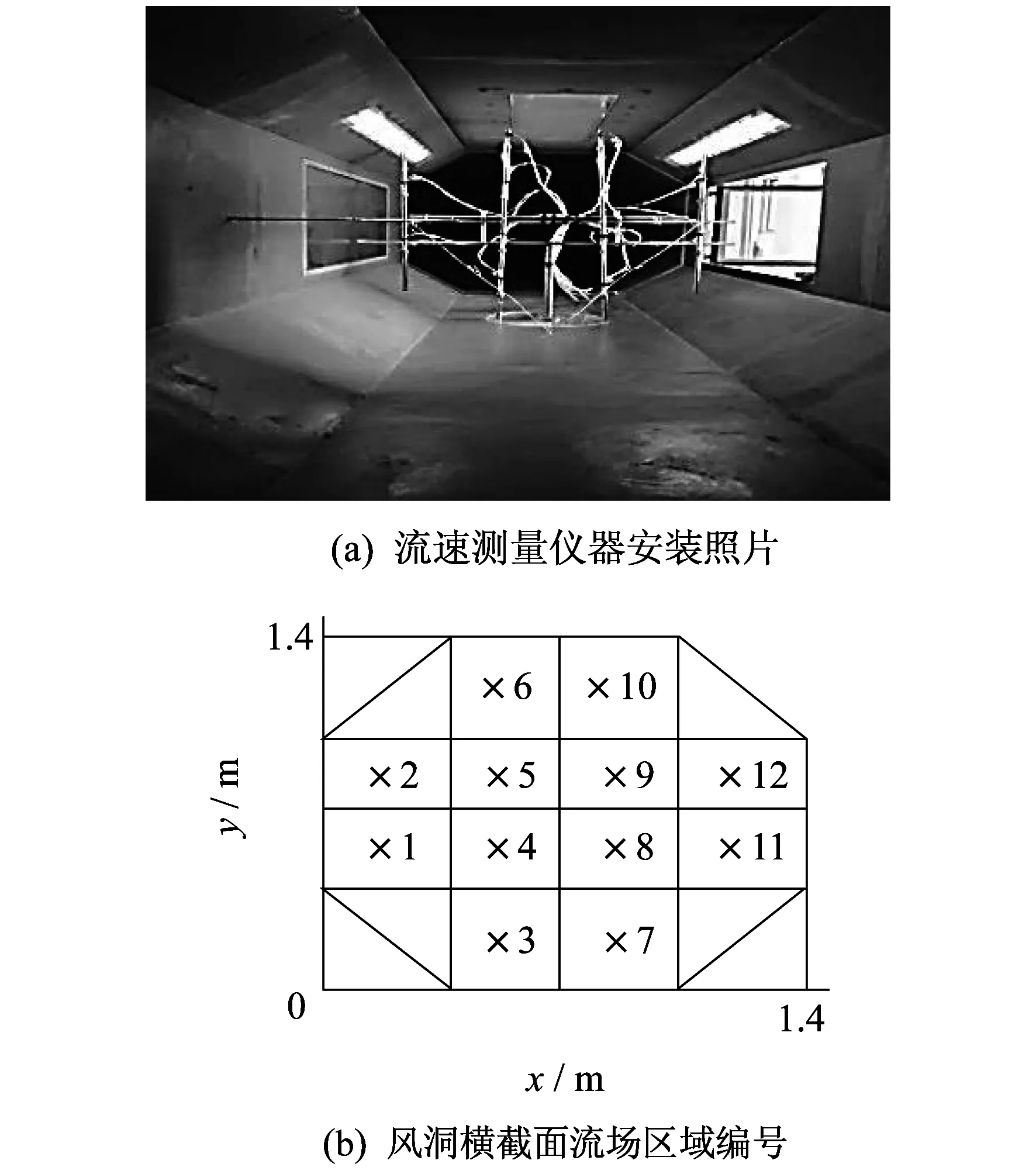
图2 流速测量仪器安装照片及风洞横截面流场区域编号
利用上述实验数据做出速度分布曲线图,横坐标1~12表示的是图2标注的12个区域中心,纵坐标表示其在风洞内测得的实时风速。根据式(1)计算出速度的偏差度μ。
(1)
式中:ν实——实测当前位置下所测的风速;
ν目——目标风速。
不同风速下试验段各区域速度的偏差度如表1所示。
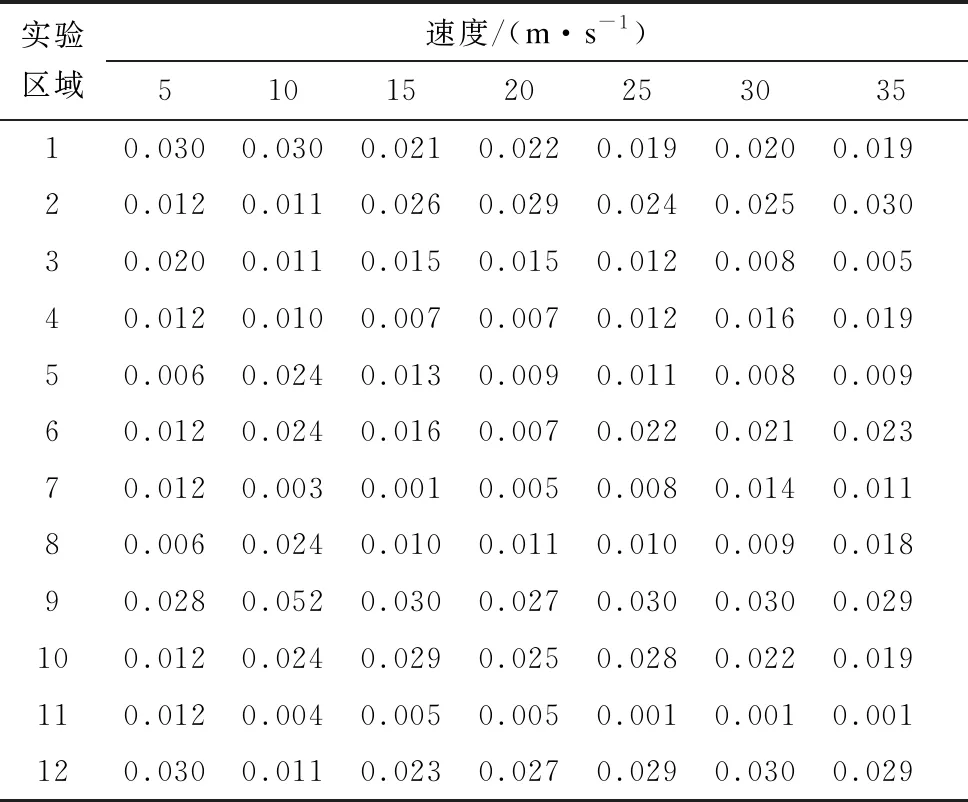
表1 不同风速下试验段各区域速度的偏差度μ
由表1可以看出,各标记区域传感器实测风速与目标风速相差不大。且从5 m/s至35 m/s,各点位置传感器所测速度平均偏差度低于3%,表明该横截面速度场稳定。以风速为15 m/s为例,12区域中心所测风速拟合成的三维曲面如图3所示。
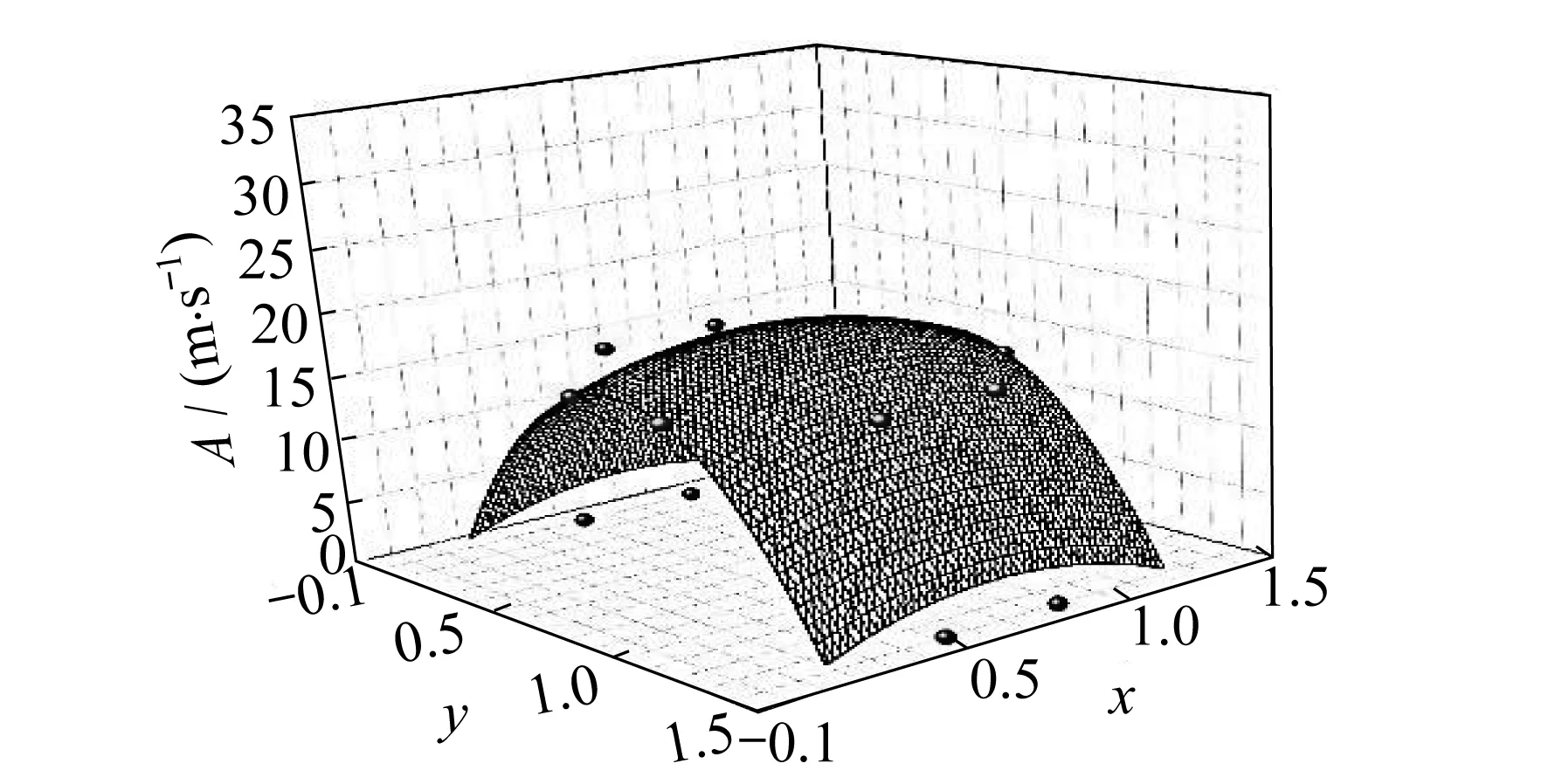
图3 风速为15 m/s时试验段内各测试点及边壁速度分布曲面
由图3可以看出,试验段中心的速度高于两侧壁面的速度,且呈现越往两侧越低的趋势。
2.2 试验段横向速度对比
将横向1.4 m均匀分成8份,取每份中心点为测试点,且相邻两点间相距0.35 m,实验采用1.35 m的测量杆,上接传感器将测试所用连接线尽量包裹于杆背后,以减少实验装置对实验的影响。同样将8个传感器所接管道按顺序接入测试仪器。标记1~8分别为从左至右在风洞内测的8个点。以平行于地面为X轴,实测风速为Y轴,绘制速度分布散点图。横向安装照片及各风速下试验段内横向各测试点速度分布散点示意如图4所示。
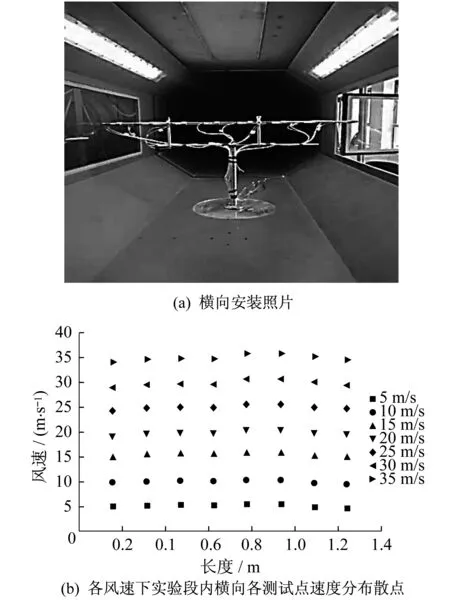
图4 横向安装照片及各风速下试验段内横向各测试点速度分布散点示意
由图4(b)可知:在固定风速状态下,风洞内中央风速由于边壁效应往往大于壁面两端的速度;整体来看,用单根测量杆布置传感器所测风速在目标风速两侧小范围波动,影响较小,曲线更明显;而利用2根测量杆布置传感器,由于传感器过于密集,会对实验结果产生影响;随着风速的增大,拟合曲线变得越来越陡,即风速越大边壁效应越明显。
2.3 试验段纵向速度对比
将纵向1.4 m平均分成8份,取每份中心点为测试点,相邻两点间相距0.35 m,实验采用1.35 m长的测量杆,保证杆上所连传感器线缆之间互不影响且不阻挡风,尽量将其置于传感器之后,不妨碍杆上8个点的传感器接收风。将管道一端与传感器连接,一端与测量仪器相连,中间连接线绑定于杆上以免其被强风吹起,干扰实验数据风速的采集。从下往上分别标记传感器为1~8,将垂直于地面方向标注为Y轴,风速为X轴,绘制出速度分布散点图。纵向安装照片及不同风速下试验段内纵向各位置速度分布散点示意如图5所示。

图5 纵向安装照片及不同风速下试验段内纵向各位置速度分布散点示意
由图5(b)可知:在各风速条件下,风洞顶部与底部风速小于风洞中心的风速,且这一变化在越高风速状态下越明显;曲线弯曲程度随风速的增大而增大,风洞顶端与底部的风速都低于中间的风速;在风洞内,风速受边壁效应的影响,顶部与底部靠近壁面处风速小于风洞中心的速度,且风速越大相差越大。
3 粒子图像测速
粒子图像测速(Particle Image Velocimetry,PIV)作为一种先进的非接触式流动测速技术,可以实现瞬时速度场的测量[13],同时PIV能够从微观的角度测量复杂流场内的结构并使其可视化[14]。流场测试所使用的PIV系统是二维粒子图像测速系统,包括双谐振脉冲式Nd:YAG激光器、Imagers CMOS互/自相关数字相机、可编程同步控制器和mDavis8.4图像处理软件。激光器的最大工作频率为10 Hz,每个脉冲能量高达200 mJ;脉冲光采用Qswitch触发方式获得,脉宽为5~10 ns,输出的激光束(绿光)波长为532 nm。相机的分辨率为1 024×1 024像素,最大工作频率为15 Hz。选择粒径0.2 μm以下的祭祀燃香烟雾粒子作为示踪粒子,根据简化估算,该示踪粒子在亚音速流动中的跟随性不低于99%[15]。风机实验台及PIV测量系统如图6所示。

图6 风力机实验台及PIV测量系统
以尖速比λ=1.9,来流风速V=12 m/s,沿叶高展向0.2R(R为风轮半径)的叶高平面内测量的流场为例,分析塔筒近尾迹速度场的分布。PIV测量区域如图7所示。图7中水平面为横轴,垂直于地面方向为纵轴,所测的速度分布结果如图8所示。其中,c为截面弦长,即该叶高截面翼型的弦长。
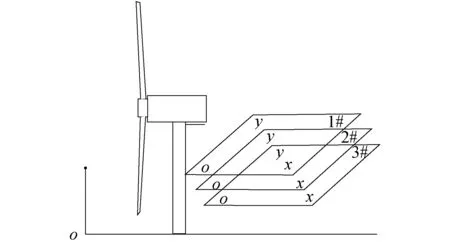
图7 PIV测量区域示意

图8 λ=1.9,V=12 m/s,0.2R叶高平面下近尾迹轴向速度分布
由图8(a)可知,由于叶轮旋转和塔筒的遮挡,在风力机塔筒下游形成了一条轴向速度降低的近尾迹区;而在图8(b)轴向速度沿y轴分布曲线中,随着轴向距离的增大,轴向速度的亏损逐渐减小,近尾迹宽度略有扩展,尾迹的宽度范围以及尾迹中心的位置都向y轴负方向移动。其中,轴速向速度与来流风速垂直。
4 实验结果分析
4.1 流场横截面整体测量
通过流场横截面整体测量,从图3可以看出,流场中心的风速远高于边壁处的速度,随着距边壁处的距离越小,风速也变得越小。计算与目标风速的偏差度,可以得出平均偏差度最小时的风速,以此时的风速做三维曲面图。计算发现,各风速下各位置偏差度都低于3%,可知该风洞截面速度场稳定,流场均匀。
4.2 流场横向测量
通过试验段横向速度分布散点图可知,在固定风速状态下,风洞内中央风速由于边壁效应往往大于壁面两端的速度,且随着风速的增大,拟合曲线变得越来越陡,即风速越大边壁效应越明显。
4.3 流场纵向测量
通过纵向速度分布散点图可以看出,在各风速条件下,风洞顶部和底部风速小于风洞中心的风速,且这一变化在越高风速状态下越明显。曲线弯曲程度随风速的增大而增大,风洞顶端和底部的风速都低于中间的风速。
4.4 PIV测量
由于叶轮旋转和塔筒的遮挡,在风力机塔筒下游形成了一条轴向速度降低的近尾迹区。受风轮旋转效应影响,风力机塔筒近尾迹流场相对于塔筒中心轴面呈非对称分布。
5 结 语
通过上述实验能得到整个风洞内流场的大致走向,对风速进行分析可以得出以下结论:此风洞中央风速高,由于两边风速受固体边壁黏性摩擦逐渐降低,故而低于中心风速。该特征表明此风洞均匀性分布较好,适合开展后续工程研究。
传统的皮托管测量会对实验内流场产生扰流,进而影响原始风场的测量。采用非介入式测量方式如粒子成像测速或激光多普勒测速,可减
少传感器对流场的干扰,能更细致地观察场内情况。但该方法布置复杂,且粒子直径会影响流场测量的精度并扰乱原有的流场。
本文通过自主研发的全截面动态风量自动标定装置精确测量某点风速,通过orange绘制三维立体图清楚观察风洞内的流场分布。相比传统测速方式,PIV能实现瞬时速度场的测量,分析粒子的流动及成像,从微观上解决了实际问题并使其可视化,但安装较为繁琐。
猜你喜欢
水泥工程(2022年2期)2022-08-22
军民两用技术与产品(2022年1期)2022-06-01
军民两用技术与产品(2021年8期)2021-11-24
西北工业大学学报(2021年3期)2021-07-12
小哥白尼(野生动物)(2020年3期)2020-07-27
上海大学学报(自然科学版)(2020年4期)2020-05-24
———重庆建成世界一流汽车风洞
汽车零部件(2019年7期)2019-08-16
数学大王·中高年级(2018年11期)2018-12-17
中国核电(2017年2期)2017-08-11
建材发展导向(2016年6期)2017-01-17
