
时间分割圆弧插补算法的改进
2021-07-15 02:49梁晓兵刘志强王璠
机械工程师 2021年7期
梁晓兵,刘志强,王璠
(河南机电职业学院,郑州 451191)
0 引言
目前数控系统在插补圆弧的过程中,使用的基本上都是二阶近似法进行圆弧插补的,这种方法使用一组直线来逼近圆弧,计算出插补周期的坐标增量值。目前国内外很多学者已经在这方面进行了很多研究,韩赛飞等[1]实现了改进型圆弧插补算法及FPGA实现;刘焕等[2]分析了基于微分模型的空间圆弧与椭圆弧插补算法;姚晓通等[3]分析了圆弧插补算法的FPGA实现;李伟光等[4]分析了无限直线逼近圆弧方法;刘鹏飞等[5]分析了在机器人领域中的应用;何均等[6]实现了短线段空间圆弧转接与插补;刘放等[7]介绍了基于四元数的空间圆弧插补算法;王中平等[8]基于矢量分析了圆弧插补算法;詹泳等[9]实现了五轴空间圆弧插补;朱国力等[10]介绍了插补算法的应用;贺德华等[11]推导了空间任意圆弧的插补算法;高宏卿等[12]推导了空间圆弧变换插补原理与算法。
在计算过程中,传统插补算法使用了三角函数的泰勒展开式中的低阶近似,使得插补点远离圆弧,产生一定的累积误差。针对这种情况,提出一种改进的圆弧插补算法,进一步提高插补运算精度。
1时间分割法插补原理
现以第一象限逆时针插补为例,说明传统时间分割法实现原理。如图1所示,设待插补圆弧半径为R,圆心坐标(0,0),插补速度为F,插补周期为T,每次插补的进给步长f=F·T。
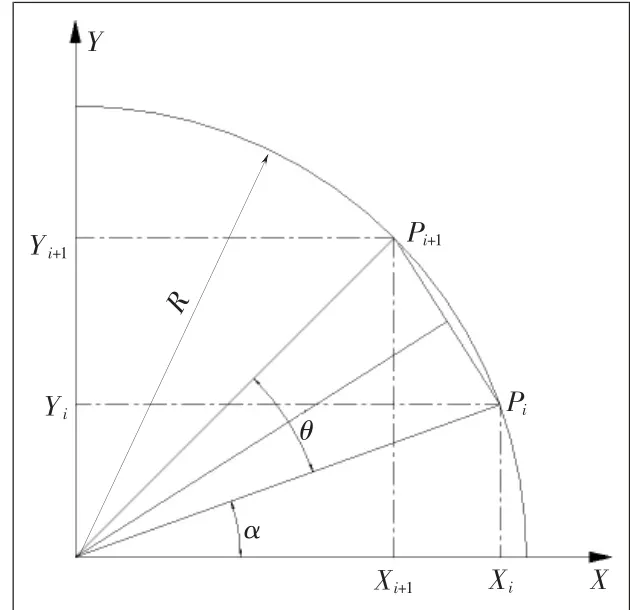
图1 圆弧逆时针插补两点位置关系
对圆弧上动点Pi(xi,yi),满足以下关系:
yi=R·sinα;xi=R·cosα。
Pi+1(xi+1,yi+1)是下一插补点坐标,PiPi+1是每插补周期的进给步长f,其对应的圆心角是θ。
下一插补点坐标值计算方法为
yi+1=R·sin(α+θ);xi+1=R·cos(α+θ)。
展开后得:

对其中的三角函数泰勒展开并取二阶以下变量公式可得:
cosθ≈1-θ2/2;sinθ≈θ。
且由θ=f/R,代入式(1)、式(2),可得:

设A=f/R=θ,B=θ2/2,代入式(3)、式(4),可得:

取Δyi=yi+1-yi=-B·yi+A·xi;Δxi=xi+1-xi=-B·xi-A·yi。

弓高误差δ计算公式为

2 时间分割法改进算法
上面传统的时间分割法圆弧插补运算,引入了近似计算,存在一定的误差,而且弓高误差较大,为了减小误差,下面提出一种改进的时间分割圆弧插补改进方法。
2.1 改进算法原理
对于有一定误差的待加工面(如图2),如果实际加工面位于理论待加工面单侧,那么最大误差就是实际加工最大尺寸减去理论加工面尺寸。如果实际加工面位于理论待加工面两侧,那么,最大误差就是理论面和实际面两侧尺寸差的最大值,如果两面对称,最大误差就是实际误差的一半。

图2 待加工面
2.2 算法实现
对于给定的弓高误差δ和圆弧半径R,分别做半径为R-δ/2、R+δ/2圆弧,已知Pi(xi,yi)点,求下一插补点Pi+1(xi+1,yi+1)坐标。过Pi点做内圆弧的切线交半径为R-δ/2内圆弧于切点P(xq,yq)点,如图3所示。

图3 改进算法逆时针插补点位置关系
由于P点是切点,PPi是内圆弧切线,且PPi长度值为f/2,由几何关系可得:

代入式(10)、式(11),可以求得P(xq,yq)坐标为:

根据图3几何关系,P(xq,yq)为Pi(xi,yi)点和Pi+1(xi+1,yi+1)连线的中点,可知:

联立式(12)~式(15),可得:


Δyi=yi+1-yi,Δxi=xi+1-xi,改进后的时间分割圆弧插补算法的计算步骤如下。
2.3 特殊点处理
由于上面为了减小误差,改进了算法,计算过程中插补的点都在半径为R+δ/2圆弧上,由此引入了2个特殊点即起点P0(x0,y0)和终点Pe(xe,ye),这两个特殊点需要特殊处理。
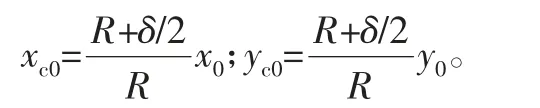
对于起点P0(x0,y0),给定的起点坐标位于半径为R的圆弧上,实际插补计算的起点位于半径为R+δ/2的圆弧上,因此需要计算插补起点Pc0(xc0,yc0)。
根据图3几何关系得:
对于终点坐标Pe(xe,ye),实际需要的终点坐标位于半径为R圆弧上,实时插补计算的终点位于半径为R+δ/2圆弧上,因此需要计算实际终点Pea(xea,yea)。根据图3的几何关系可得:

3 两种算法比较分析
在传统算法中,由于对正弦余弦三角函数进行了二阶近似,由式(5)、式(6)求得的下一插补点可能会偏离圆弧产生径向误差。插补过程中由于使用了弦线代替圆弧,还会产生弓高误差。
在改进算法中,由于使用R+δ/2的圆弧代替半径为R的圆弧,同样会产生径向误差和弓高误差。
3.1 径向误差
径向误差即实际插补点坐标与理论坐标点的偏差,实际计算根据实际插补点坐标的坐标值与理论半径的距离来表示:

由式(5)、式(6)可得传统插补算法径向误差为
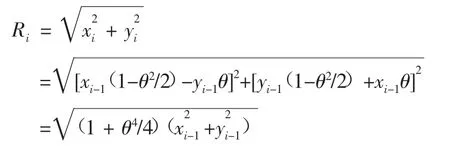
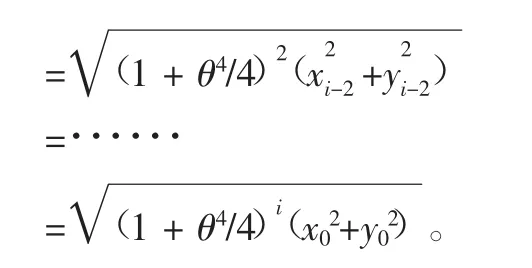

由于θ不为0,δci也不等于0,即存在径向误差,而且随着插补次数的增加,径向误差也会越来越大。
对于改进后的算法,由图3几何关系得

由式(16)、式(17)、式(19)得

代入式(18),可得

经过改进后,算法误差是恒定值,和插补次数无关,误差不累计,可以在预插补阶段进行误差补偿一个恒定值,进一步减小误差。
3.2 弓高误差

3.3 插补速度
在传统得插补算法中,使用了二阶近似来简化计算过程,改进算法没有采用近似处理,一方面是因为现在嵌入式系统计算能力越来越强,比如STM32等微控制器都带了硬件除法器;另一方面是因为本改进算法在插补过程中和传统插补算法过程一样,除了常量系数计算不一样,常量系数计算过程可以放到插补预处理阶段进行,而且改进算法比传统算法只多了一步除法运算。在168 MHz的STM32f407芯片上进行插补系数计算仿真,结果测得传统算法每次实际计算时间为0.148μs,改进后插补时间为0.369μs,时间基本一致。
综上,传统算法径向误差随插补次数的增加不断增加,改进算法后,径向误差不随插补次数变化而变化,稳定无变化。弓高误差传统算法为f2/(8R),改进后算法误差为f2/(16R),只是传统算法误差的一半。由于径向误差和弓高误差在相反方向,最大误差为径向误差和弓高误差的最大值。改进后算法最大误差为f2/(16R),只是传统算法误差的一半。
4 结语
通过对时间分割圆弧插补算法和改进后的算法对比计算分析,可知改进算法的误差要比原来的算法误差减小一半,精度得到了很大提高。改进后插补过程运算速度相同,插补系数计算相对低一些,但是误差不到1μs,满足实时插补要求。
猜你喜欢
建材发展导向(2022年4期)2022-03-16
中学生数理化·高一版(2021年3期)2021-06-09
数学物理学报(2021年1期)2021-03-29
重型机械(2020年3期)2020-08-24
科学技术创新(2020年6期)2020-04-18
数学年刊A辑(中文版)(2019年3期)2019-10-08
制造技术与机床(2019年6期)2019-06-25
制造技术与机床(2017年3期)2017-06-23
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
中国海上油气(2015年3期)2015-07-01
