
基于改进型粒子群算法的无刷直流电机速度控制研究
2021-07-15 09:37:24远世明杨明发
电气开关 2021年1期
远世明,杨明发
(福州大学电气工程与自动化学院,福建 福州 350108)
1 引言
因构造简单、效率突出等突出特点,无刷直流电机(Brushless DC Motor,BLDCM)在工业伺服数控中应用广泛[1]。而其中的过程控制一般采用PID控制器来实现。相比较于传统PID控制器存在的参数整定困难,依赖人工经验,无法满足程应用对高精度、低延时、抗干扰能力强的要求等问题,目前研究人员采用多种智能算法来优化参数整定[2],以降低一线工程师的工作量。
当下应用较多的智能算法有模糊控制(Fuzzy Control,FC)、遗传算法(Genetic Algorithm,GA)、神经网络(Neural Network,NN)、蚁群算法(Ant Colony Optimization,ACO)以及粒子群算法(Particle Swarm Optimization,PSO)等。其中模糊控制的思路为不考虑被控对象的数学模型,通过模拟人工的实践经验来提高系统的自适应性[3],但模糊规则以及隶属度函数的选取没有系统的方法,完全依赖经验[4],且处理复杂问题时将导致需求的模糊规则范围扩大,降低控制精度,严重时甚至不能实时控制。遗传算法的思想来源于生物界的自然选择学说,根据适应度函数和生物基因遗传中的复制、交叉和变异对个体进行筛选[5],但其效率通常较低,易过早收敛[6],无法全面地表述所需优化问题的约束条件。神经网络是对人脑在微观结构和功能上的抽象概括[7],通过模拟人脑中信息在神经元中传递过程而得到结果,但训练模型所需时间极其漫长,对神经网络深度学习的理论研究也难言完善[8]。蚁群算法参考了自然界蚁群觅食行为,以个体对最短路径的追求和信息素的正反馈得到所求最优解[9],但该算法的特点导致其在求解初期速度缓慢,且极易陷入局部最优[10]。粒子群算法通过搜索各粒子当前最优来迭代寻找全局最优[11],类似于遗传算法却无交叉和变异,所需参数更少更简洁,方便编程实现控制效果。针对其与其他进化搜索算法一样易陷入局部最优的问题,对粒子群算法的改进有以下几点:在参数选取方面,主要侧重于通过选取不同的惯性权重公式、调节学习因子来改进粒子的速度更新[12];在种群结构方面,侧重于通过粒子分区[13],划分搜索空间[14]等形式以避免粒子过分单一;在算法本体上,侧重于融合其他智能算法,如引入模拟退火准则的退火粒子群算法[15],引入免疫规则的免疫粒子群算法[16],引入保持多样性机制的蜂群-粒子群算法等[17]。
本文采用概念清晰明了、收敛速度较快、所需参数较少的粒子群算法来实现对PID控制器的智能优化,并通过公式对该算法的惯性权重和学习因子进行优化,减少算法冗杂对实际控制过程增加过多干扰因素。经Matlab编程和simulink仿真验证,改进PSO优化的PID控制面对空载、给定转速变化、负载条件下均能有效提高BLDCM转速系统的响应速度、抗干扰能力和自适应性能。
2 无刷直流电机数学模型
因BLDCM的感应电动势为阶梯波形[18-20],电感也呈非线性,因而采用常用的d-q变换已无意义。故应用根据相电流、相电压为状态变量的相变量法是直接有效的。假设电机仍以两两导通的方式工作,对其进行假设如下:
(1)忽略电机电枢反应和齿槽效应。
(2)忽略电机内部磁路饱和、剩磁、磁滞和涡流的影响。
(3)定子三相绕组为完全对称的集中绕组。
根据KVL可得电压平衡方程:
(1)
对于BLDCM常用的Y型绕组联接,有:
iA+iB+iC=0
(2)
因此:
MiA+MiB+MiC=0
(3)
则式(1)可修改为:
(4)
式中:uA、uB、uC,eA、eB、eC,iA、iB、iC分别为定子三相绕组电压、反电动势、电流;L为定子绕组自感;M为两相定子绕组互感;R为每相定子电阻;p为微分算子。
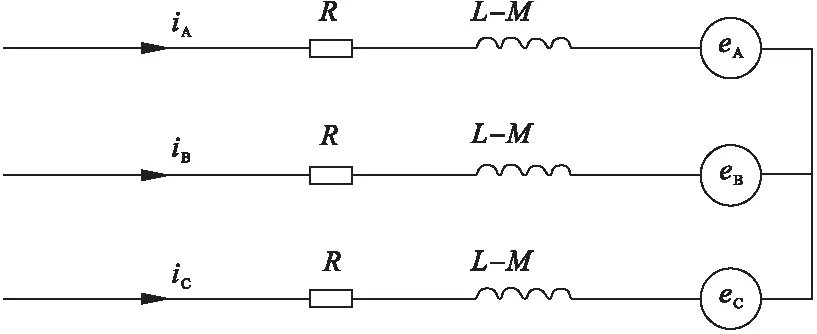
图1 BLDCM等效电路图
BLDCM反电动势方程:
(5)
式中:p—极对数;W—每相绕组串联匝数;φ—每极磁通量;α—计算极弧系数;n—电机转速;ω—转子旋转电角速度。
其电磁转矩方程:
(6)
式中:Ω—转子机械角速度;E—相绕组感应反电动势;I—电枢电流。及机械特性方程:
(7)
式中:TL—负载转矩,B—阻尼系数,J—转动惯量。
3 改进粒子群算法研究
PSO以一群粒子来模拟在某区域内寻找唯一食物的鸟群,本质上是种智能随机搜索算法[21]。该算法设定:n个粒子在D维空间以某速度Vi飞行,目标函数对每个粒子进行适应值评价。对于粒子的迭代,根据目前自身搜索到的个体最佳点,和整个粒子群搜索到的全局最佳点来完成迭代更新[22]。具体数学表达式如下:
空间中粒子位置向量可表示为:
xi=(xi1,xi2,…,xiD),i=1,2,…,n
其飞行速度可记为:
Vi=(vi1,vi2,…,viD),i=1,2,…,n
单个粒子目前找到的最优位置被叫作个体极值,可记为:
Pbest=(pi1,pi2,…,piD),i=1,2,…,n
全体粒子目前找到的最优位置被叫作全局极值,可记为:
gbest=(pg1,pg2,…,pgD),i=1,2,…,n
每个粒子将根据这两个极值进行位置速度更新:
vid=ω*vid+c1r1(pid-xid)+c2r2(pgd-xid)
(8)
xid=xid+vid
(9)
式中c1、c2—取值常为2左右的学习因子,r1、r2—[0,1]之间的随机数,ω—惯性权重系数[23]。粒子速度更新方式如图2所示。
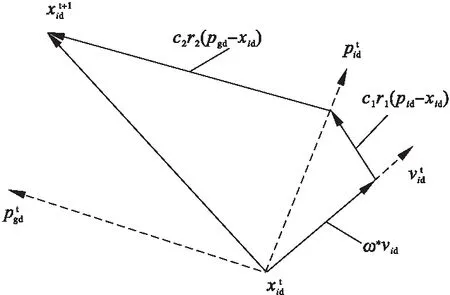
图2 粒子速度更新矢量图
针对具体工业应用,深挖一种控制算法的潜力比叠加多种算法更能达到低延时,高效率,有效降低控制难度的效果[24-25]。本文为了解决常规PSO易拘限于局部最优而早熟,及全局收敛效果较差的问题,采用自适应惯性权重法来改进常规PSO,通过调整惯性权重ω和学习因子c1、c2的方式来控制粒子的搜索步长,使得算法在运算前期就有较大的速度与权值,适合快速扩大搜索范围,同时粒子群搜索速度随着迭代次数增加而减速,增强局部寻优能力,使得粒子群在局部和全局搜索间做到平衡,更加符合实际的群体搜索过程。惯性权重ω更新方程如下:
ω=ωmin+(ωmax-ωmin)×λt-1
(10)
式中,ωmax—惯性权重最大值,ωmin—惯性权重最小值,t—当前迭代步数,参数λ常取0.95。改进型算法流程图如图3所示。

图3 改进型PSO流程图
4 仿真结果与分析
本文根据以上理论分析结果,控制系统转速外环选择改进型PSO优化的PID控制器,以克服非线性、强耦合的BLDCM在工业应用中时常遇到的负载转矩突变、给定转速波动;电流内环选择传统的PID控制器,以确保电机可以迅速启动,并抑制母线电流过幅脉动。系统原理图如图4所示。

图4 改进型PSO控制系统原理图
利用simulink平台搭建基于改进型粒子群算法的BLDCM转速电流双闭环系统模型进行仿真验证。为了突出对比效果,仿真的转速环分别采用传统的PID算法和改进型PSO-PID算法进行控制。主要的仿真参数如下:定子相电阻:2.875Ω;定子相电感:8.5mH;转动惯量:8e~4kg·m2;反电动势常数:0.175V·s;阻尼系数:1.73e~3N·m·s;极对数:4。对于PSO仿真程序,其涉及到的参数较少,因此参数的优劣对算法的控制效果影响是深远的,其主要参数为:学习因子c1=c2=1.975;惯性权重最大值ωmax=2.3,惯性权重最小值ωmin=1.1;最大迭代次数maxgen=40;粒子群规模sizepop=50;最小适应值minfit=0.001。
如图5为在空载条件下,传统PID控制模式和改进PSO-PID控制下的仿真电机转速曲线图。给定转速为:0~0.3s时3000r/min,0.3~0.7s时为1500r/min,0.7~1s为2000r/min。由图可以看出,在给定转速设定为3000r/min时,改进型PSO-PID控制法可在0.01s达到稳态,传统PID控制法在0.05s时达到稳态;给定转速下降至1500r/min时,改进型PSO-PID控制法在0.15s后达到稳态,传统PID控制法在0.04s后达到稳态;给定转速上升至2000r/min时,改进型PSO-PID控制法可在0.01s内达到稳态,而传统PID控制法在0.04s后达到稳态。由此可以看出,在空载情况下,传统的PID控制响应速度较慢,达到稳态时间较长;作为比较,改进后的PSO-PID法稳定性较强,能跟随给定转速快速变化,收敛速度快。
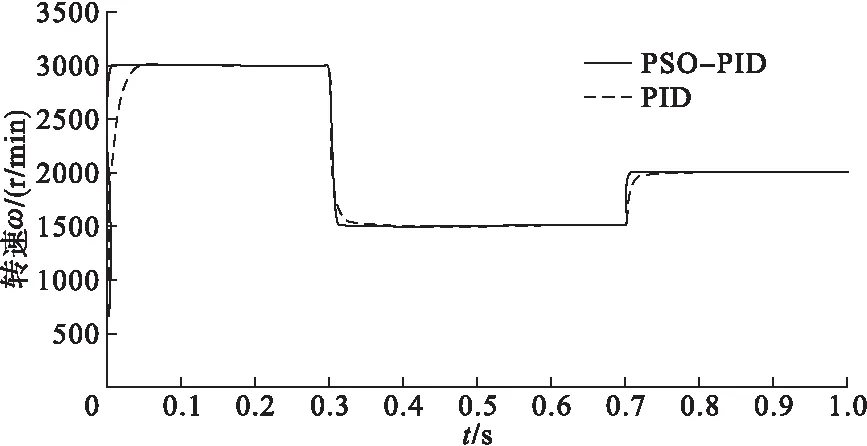
图5 空载时转速对比图
如图6所示,在保持给定转速如上不变时,在0.5s突然给系统加上3N的负载,以观察两者抗干扰性能。可以看到,传统PID控制下,电机在面对突加负载时,欠调明显,转速峰值超出给定约150r/min,超调量为10%,并在0.052s后跟踪到给定转速;反观改进后的PSO-PID法在面对突加负载时,近乎没有欠调/超调的存在,经过放大后可以看到,其超出给定约1.3r/min,超调量为0.8%。以上仿真结果表面,优化后的PSO自适应能力较为突出,抗干扰性能优越,优化控制效果明显。
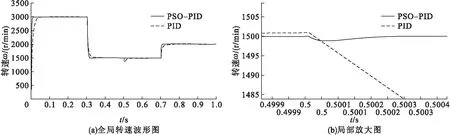
图6 0.5s突加负载时转速波形图
同样提取两者的部分A相反电动势,如图7可以清晰地看到,在0.5s负载突变的时候,传统的PID控制法反电动势出现了一些波动,而改进型的PSO-PID控制法则一直保持稳定,没有明显的异动。这也从另一个方面验证了改进型PSO优越的抗干扰性能。

图7 A相反电动势局部对比图
由以上仿真对比可得:
(1)对于BLDCM的启动,相对于传统PID,改进型PSO控制法能实现动态响应快,调节所需时间短以及超调量小等优点。
(2)对于BLDCM给定转速的变化,相对于传统PID,改进型PSO控制法适应能力强,回归稳态所需时间短,转速波动微弱。
(3)对于BLDCM突加负载时,相对于传统PID,改进型PSO控制法抗干扰能力优越,动态性能良好。
5 结语
综上,本文针对传统PID调速器伴生的自适应能力较差、响应速度较慢以及抗干扰能力较弱等问题,提出了基于改进型PSO的BLDCM调速系统,以求实现对转速的优化控制。通过simulink平台仿真可见,在空载条件下,此系统能实现快速无超调响应;在给定转速有变化时,此系统能迅速跟随,适应能力优越;在负载条件下,此系统面对突加负载波动微小,和传统PID控制方法相比可以忽略不计,抗干扰能力突出;可见此系统动态响应速度快,控制精度高,鲁棒性较强,在较宽的转速范围内均有良好的动静性能。
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21 00:40:16
基层中医药(2022年5期)2022-10-24 01:27:32
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:06
一重技术(2021年5期)2022-01-18 05:42:08
测控技术(2018年4期)2018-11-25 09:47:14
电子制作(2018年2期)2018-04-18 07:13:31
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:23
上海公路(2017年1期)2017-07-21 13:38:33
小学科学(学生版)(2016年1期)2016-10-09 01:53:02
现代工业经济和信息化(2016年12期)2016-05-17 05:37:56
