
水下岩塞高精度空间地理信息获取方法与应用
2021-07-15 07:19赵亚峰
水利技术监督 2021年6期
赵亚峰
(辽宁省朝阳水文局,辽宁 朝阳 122000)
岩塞口是输水工程的咽喉部位,其空间地理信息数据是设计、施工的基础数据,一旦基础数据质量出现问题,将直接影响设计质量和执行力度,还会产生难以估量的经济损失和社会影响。因此研究水下岩塞高精度空间地理信息获取,对于输水工程提前竣工,提前发挥工程效益起了重要作用。随着科技的不断进步,人们对水下信息的需求越来越高,一方面希望更加清晰的呈现复杂多样的水下地形地貌细节,另一方面希望单位时间内获得更多的测量结果。因此,如何进一步提高水下测深设备的测量精度和效率成为当前急需面对与解决的难点。早期的测深手段包括测深杆、测深锤、单波束测深,而多波束测深仪的诞生则把水下测深技术从“点-线”测量时代带入了“线-面”测量时代,从而使水下地形地貌信息进入了高效精细化测量阶段。为高质量完成水下岩塞高精度地理信息的获取,本文采用GPS RTK技术、多波束测深技术、水下机器人ROV技术、三维成像声呐扫描技术来完成本工程岩塞口测量外业数据采集任务,通过多元函数虑差法和水下高程控制网对数据进行精细处理。
1 水下测量技术
1.1 水下地形地貌获取方法研究
水下地形获取方法主要通过定位和测深来完成。定位可采用卫星定位,测深的方法主要包括单波束测深系统、多波束测深系统、机载激光测深系统等。单波束测深系统是“线”的测量模式,操作简单,成本较低,但成果精度低;机载激光测深系统可以快速提供覆盖水下的地形数据,但受水质影响较大,由于激光脚点密度较小,不能最大程度还原水下真实地形,而且成本较高;多波束测深系统是“面”的测量形式,数据处理复杂,成果精度高,相对成本较低。
1.2 水下工程环境探测方法研究
水下工程环境探测可通过潜水员携带探测设备和水下机器人来完成,因水下环境复杂、不明的情况等,作业任务会受到极大的限制,存在较大的风险性。针对复杂未知环境,水下机器人优势明显。水下机器人分两种,一种是有缆水下机器人即“遥控式水下机器人ROV”,其特点:动力充足、作业时间不受限制,轻巧、灵活性高,环境适应性好,工作高效,通讯稳定;第二种是无缆水下机器人即"自治式水下机器人AUV,其特点:自主性和灵活性更高,水下运行时间短、活动范围有限、通讯和智能化要求高。
1.3 水下三维模型的获取方法研究
水下三维模型可通过多波速技术或者三维成像扫描技术来完成,由于岩塞口的特殊性,多波束技术的作业范围无法对岩塞口内部全覆盖。与多波束技术相比,三维成像扫描技术数据分辨率更高,可提供非常优秀的图像质量,全方位工作。但不能提供三维模型的绝对空间位置。可通过融合多波速数据与三维成像扫描数据,即解决了空间位置问题,又可形成岩塞口整体的三维模型。
1.4 数据精细处理方法研究
数据采集精度可通过自动化程度高、标称精度高的仪器设备来完成,为提高水下测量成果质量可从数据处理方法入手。首先对数据拼接融合的误差问题、数据拼接质量控制方法进行分析,基于目前误差处理方法,对数据拼接、数据融合方法进行优化设计,最后建立水下高程控制网对拼接、融合数据进行纠正。
2 岩塞口地形图测量
2.1 外业数据采集
地形图外业数据采集要通过两部分来完成,分别是陆地部分和水下部分。陆地部分采用Leica TS30全站仪无棱镜技术来完成,按1∶100精度施测,施测地面点间距离一般不大于3m。地形变化较大的地方进行加密测量,地形较平坦的点间距离可加大。水下部分采用GPS RTK技术、Sonic 2024多波束测深仪与其匹配的Octans高精度姿态传感器使用多波束采集软件Qinsy进行数据采集,共计记录9条测线。
2.2 数据处理
多波束数据处理采用cairs,数据经过安装姿态改正、噪点删除、潮位改正、声速改正、数据合并、生成表面、坐标转换、数据输出等步骤生成点云数据。内业使用南方CASS9.0标准化软件成图,地形图等高距为0.2m,高程注记0.01m。处理后的水下地形如图1所示。概略成图后,对现场进行巡视检查,对地形有异议的,明确后进行了修正。同时对已知数据进行了检查,精度满足规范要求。

图1 水下地形图(局部)
3 水下岩塞工程环境探测与巡视
经多波束扫测后,确认岩塞口的具体位置,对水下岩塞进行了检测,拍摄视频文件。由于水下情况相对复杂,水下机器人共计下潜2次。第一次下潜后对洞口顶部以及内部水泥构件进行了检测,由于遇到外露的钢筋,为防止水下机器人的安全,经小组研究,先行将水下机器人撤回,再安排第二次下潜。为防止线缆被钢筋所缠,采取水下机器人直上直下的观测方式,尽量避免水下机器人的平推等水平方向的运动,第二次下潜,主要对涵道壁进行了观测,并记录相关视频数据,如图2所示。
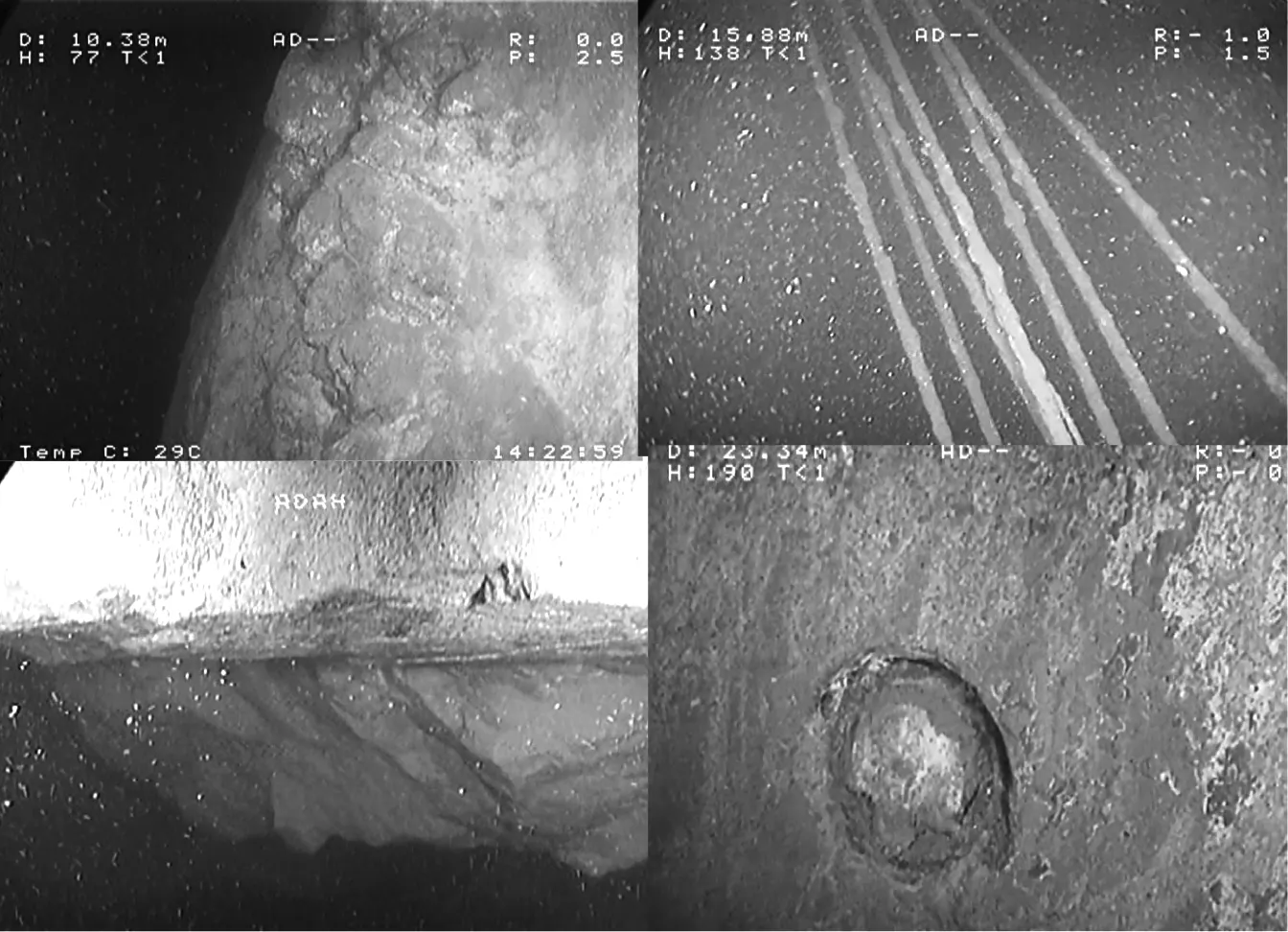
图2 水下视频截图
4 岩塞口高精度三维成像
4.1 数据采集与处理
由于水下存在多处钢筋,三维声呐共计扫测3次,每次扫测30min左右,共进行了2个固定点扫测。三维声呐内业数据处理采用 Proscan数据采集软件以及实测数据后处理软件共同进行,实测数据的处理主要包括:实测数据噪音干扰预处理、各站实测数据合并。最后,将多波束数据与BV5000三维声呐采集数据合并,采用多元函数滤差法进行人工干预,最后形成整体的水下三维模型图,处理结果如图3—5所示。

图3 噪音干扰删除

图4 噪音干扰删除后

图5 多波束数据及BV5000数据融合
4.2 建立水下高程控制网
本次共布设23个水下高程控制点,在岩塞口位置进行了加密。以“桓集隧道工程岩塞口施工控制网复测成果”为起算点,使用南方S86T 双频GPS接收机、50m可调钻杆、钻井平台等设备,采用快速静态的方式进行测量作业,每个点测量时间均大于5min。内业处理采用GPS网平差处理软件CosaGPS V6.0进行坐标平差和高程拟合计算,解算出每个控制点的平面和高程,结果见表1。最后通过水下高程控制网对上述成果数据进行纠正。

表1 水下高程控制网成果表
4.3 断面测量
为了准确反映洞内欠挖、超挖情况,本次以整体的水下三维模型图为基础,起点垂直于洞轴线,向洞内方向布设断面,断面间隔为0.2m。将断面切面与水下三维模型图相交所得的点云数据连接起来构成断面图,如图6所示。通过实际断面成果与设计断面比较,除进口底部左侧凸出一长4m、宽2m、高1.5m的岩体,其余部位成型较好。

图6 岩塞进水口断面图
4.4 精度评定
对岩塞口地形图成果进行了精度评定,评定方法采用外业散点法施测,选取的检测点均匀分布、随机选取明显地物点。地形图测量成果选取40个水下高程点作为检测点,检测结果见表2,从评定结果可看出高程中误差为0.08m。检测结果满足规范要求。
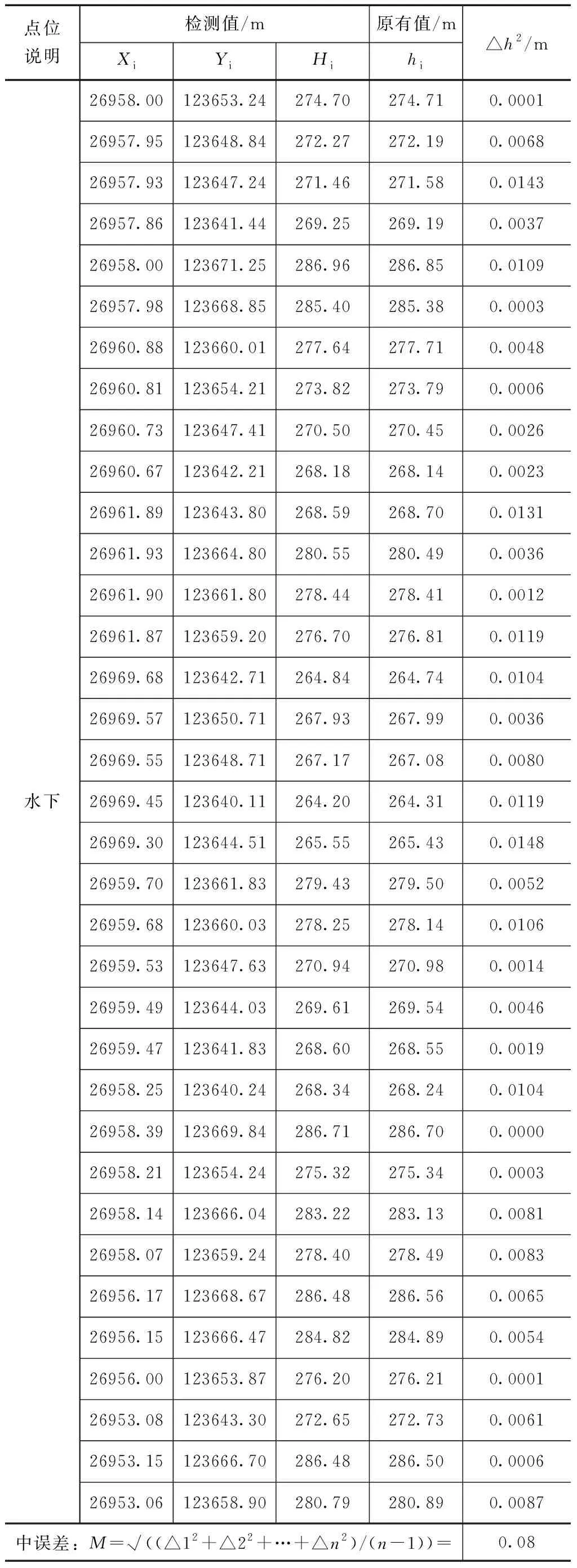
表2 精度评定表
5 结论
(1)要获得符合精度要求的水深数据,需要对多波束进行安装校准分析,建议平坦区域同一条测线,以3节航速相反航向分别测量一次,而特征地形(斜坡或暗礁)上同一条测线,以3节航速相反航向各测量一次。
(2)为了提高水下测量点的精度,针对水深小于50m,测量范围较小的区域,建议可建立水下高程控制网,高程控制点应均匀分布,并在条带拼接区域和数据融合区域进行加密。
(3)为提高测图的精度,建议采用中位参数的多元函数滤差法最大程度的对区域的特征点进行提取,并可提高数据拼接、融合后的匹配异常值的检测效率和精度。
猜你喜欢
信息通信技术(2022年2期)2022-05-31
一重技术(2021年5期)2022-01-18
资源信息与工程(2021年5期)2022-01-15
成都信息工程大学学报(2021年6期)2021-02-12
当代陕西(2020年23期)2021-01-07
舰船科学技术(2020年3期)2020-04-22
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
电子制作(2018年11期)2018-08-04
消费导刊(2017年8期)2018-01-18
