
单量估计法单光子激光透雾成像
2021-07-14 15:50郭世杭孙剑峰
光学精密工程 2021年6期
郭世杭,陆 威,孙剑峰,刘 迪,周 鑫,姜 鹏
(1.哈尔滨工业大学 光电子技术研究所 可调谐激光技术国家级重点实验室,黑龙江 哈尔滨150001;2.复杂系统控制与智能协同技术重点实验室,北京100074)
1 引 言
在光学成像过程中,图像易受雾气影响[1]变得模糊,导致图像质量降低。针对可见光CCD、红外等被动光学成像探测器,透雾方法主要围绕图像处理复原[2]、物理模型复原和深度学习[3-4]方面展开。但受被动成像机理[5]限制,强雾气后向散射和弱目标回波完全叠加,难以有效分离混叠信号,透雾成像难度大。
激光雷达具有自主收发同步控制的能力,通过距离选通能够有效抑制雾气后向散射,在透雾成像方面优势明显[6]。传统的激光透雾主要采用ICCD距离选通激光成像方法,但受探测器灵敏度和时间分辨能力的限制,难以提取浓雾内目标的回波信号。Gm-APD激光雷达具有较高的探测灵敏度,可实现单个光子探测,在透雾成像上具有独特的优势。当目标回波较弱时,可通过提高出射激光功率来提高目标的回波强度,但与此同时雾的后向散射作用也随之增强[7-8];也可通过提高探测器灵敏度来提高目标的光子探测率,但噪声会随之增加。因此,要解决Gm-APD激光雷达的雾中成像问题,需要对Gm-APD激光雷达雾天成像时激光传播过程中发生的散射进行研究。
目前,对激光雷达主动成像的研究较少,Gm-APD激光雷达的研究更少。2006年,加拿大Observe Technologies公司利用研制的激光距离选通成像系统,完成了对雾天目标成像实验,能够清楚地对雾后的目标进行成像,提高了成像系统在恶劣天气下的成像能力,展示了激光距离选通透雾成像的优势。2012年,哈尔滨工业大学利用距离选通激光雷达验证了暗通道先验处理算法(DCP)、多尺度Retinex算法(MSR)等[9-10],并用客观指标评价了不同算法的处理效果。
近年来,随着具有单光子探测灵敏度的GMAPD技术的成熟,美国麻省理工大学(MIT)在单光子激光雷达透雾成像方面走到了世界前列,提出雾滴对光子的后向散射服从Gamma分布,通过对光子数序列进行极大似然估计,实现了对分布模型中两个参数的有效估计,完成了车库内浓尘雾目标成像,但没有对模型参数的物理意义做进一步探讨与应用。本文在改进Gamma模型的基础[11]上,充分利用模型参数的物理意义,提出基于单量估计的GM-APD激光雷达透雾成像重构算法,对比传统目标提取算法,有效提升了雾中目标的恢复准确度。
2 单量估计GM-APD激光雷达透雾
2.1 GM-APD激光雷达雾天成像过程
GM-APD激光雷达雾天成像过程如图1所示。GM-APD触发模型回波光子数与触发次数之间服从泊松分布。根据泊松分布触发模型,第j个时间间隔的触发概率Pj与它对应的回波光子数N(tj,tj+1)之间的关系为:
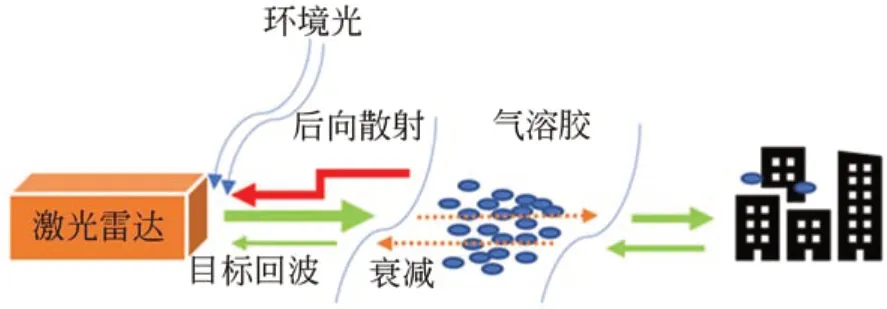
图1 GM-APD激光雷达雾天成像过程Fig.1 GM-APD lidar fog-day imaging process

该时间间隔的回波光子数为:
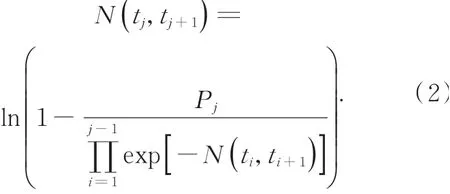
在实际成像实验中,直接得到触发次数分布,计算可得各触发间隔的触发频率Pj,由此可根据式(2)转化为回波光子数分布N(tj,tj+1),从而应用光子分布模型进行目标的提取与恢复。
2.2 单量估计法理论
GM-APD激光雷达雾天成像后向散射为单光子和雾滴粒子的作用过程,对光子在雾中的传播时间进行分析。总传播时间为碰撞次数。考虑μt的实际意义,设μt=μv,则总传播时间分布的概率密度为:

可见光子总传播时间分布符合Gamma分布,应用该分布对实际数据进行拟合时,需要考虑特定探测器的输出数据形式以及概率分布变量t的单位与划分问题。对GM-APD激光雷达而言,其计时时间是离散的且以bin为最小单位进行划分,若每个bin为tb,光子在雾中传播,其速度近似等于光速,则有:

因此提出GM-APD激光雷达的后向散射分布模型为:

在实际雾天成像实验中,雾的衰减系数μ可以精确测量或通过能见度计算得到,但光子在传播过程中的散射次数是无法测量的,因此在应用GM-APD激光雷达后向散射光子分布时,可能出现参数μ已知而参数k未知或者两个参数均未知的情况。综上,得到后向散射光子分布共有3种方法[12]:(1)已知k,μ直接得到后相散射分布,称为直接估计法,因为散射次数无法确定,因此不考虑采用直接估计法;(2)已知μ,通过采集到的回波数据,利用极大似然估计得到k,称为单量估计法;(3)根据数据对μ和k同时进行极大似然估计,称为双量估计法。
与双量估计法相比,单量估计法直接得到了一个真实的μ,而双量估计法的μ和k都需要通过极大似然估计得到,因而不确定性会更大。
2.3 模型对消重构过程
GM-APD激光雷达雾中目标的三维像与强度像重构过程如图2所示。

图2 重构进程示意图Fig.2 Schematic diagram of reconstruction process
当雾的浓度较高时,目标回波淹没于后向散射中,采用全部回波数据对后向散射回波分布进行估计得到fB(bin),转化为NB(bin),雾天时太阳背景光子为较小的常数,暂不考虑其影响。将NB(bin)与整体回波分布M(bin)按照最大值归一化,归一化常数为:

则目标回波分布为:

3 GM-APD激光雷达透雾成像实验
在室内搭建透雾实验平台,实验装置如图3所示。激光发射源采用532 nm的绿光,激光脉宽为10 ns,重频为10 k Hz。距激光器4 m处放置雾气箱,箱长1 m,由20,10,40,30 cm 4个长度不同的长度段组成,可以模拟不同长度段的雾气,雾气箱两端是光窗,GM-APD激光雷达的时间分辨率tb为2 ns。光功率计探测能量为2~10 W,探测波长为0.19~20μm。
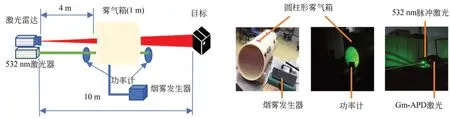
图3 透雾实验装置Fig.3 Experimental apparatus for fog penetration
实验时,激光器电流为2 A,室内环境中静态目标为两个立方体盒子,两个盒子前后相距1 m,前面盒子距离激光器10 m,采用两种雾气浓度进行比对实验。第一种激光在进入光窗时测得的输入功率为338.34 mW,穿过1 m的雾气经过后光窗时的功率为219.25 mW,考虑光窗的透过率为85%,因此可得到激光进入光窗后的功率为287.59 mW,出射光窗前的功率为257.94 mW。计算得到532 nm激光在这1 m雾气中的衰减系数为0.11 m-1。第二种激光输入功率为338.38 mW,输出功率为103.81 mW,得到的衰减系数为0.86 m-1。第三种激光输入功率为338.30 mW,输出功率为22.33 mW,得到的衰减系数为2.37 m-1。
对两组不同雾气浓度下多帧室内实验数据进行处理,分别采用峰值法、双量估计法和单量估计法进行三维重构,得到的重构图像如图4所示。

图4 多帧重构距离像Fig.4 Multi-frame reconstruction of distance image
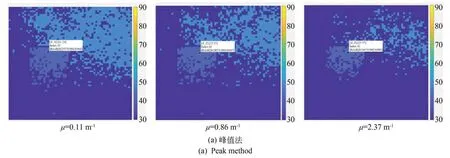
主观上,峰值法可以隐约看到目标物体,但是轮廓不完整,只有目标的一个边角;双量估计法可以区分出背景和目标区域,但是对目标的显示却很差,几乎看不到目标;单量估计法可以清晰地看到两个目标物体,从颜色看两个目标深度不同,正是距离差值导致的结果。另一方面,对比两种状态下的成像,可以发现,雾气浓度较大时,3种方法的重构图像都差于低浓度雾气下的情况,但单量估计法在图像重构方面的优势依然显著。
客观上,对目标位置距离像信息进行直方图统计,结果如图5所示。本文中距离值通过bin数来计算,一个bin代表0.3 m。

图5 距离像直方图统计Fig.5 Histogram statistic of distance image

为了更加清晰地对比3种方法对距离像的恢复情况,列出表1。由表1可知,双量估计法下,数据恢复信息非常少,单量估计法与峰值法相比,信息恢复更多。衰减系数为0.11 m-1时,距离信息恢复量提升8.26%;衰减系数为0.86 m-1时,距离信息恢复量提升86.86%;衰减系数2.37 m-1时,距离信息恢复量提升253.19%。

表1 各方法距离像恢复像素数量对比Tab.1 Comparison of distance image recovery data of different methods
更近一步对比效果,采用目标恢复度与相对平均测距误差[13]来比较各方法的恢复效果,目标复原度定义为:

其中:d为恢复距离像,dS为标准距离像,dth为误差容许范围,这里取值为1,即1个bin,为0.3 m,n为总像元数。S1越接近1,距离像恢复得越好。相对平均测距误差定义为:
S2越接近0,恢复误差越小,恢复效果越好。
峰值法和单量估计法计算得到的复原度与平均测距误差如表2所示。可见单量估计法相比峰值法,相对平均误差相差不大,但随着衰减系数的增加,目标复原度更高,与几乎看不到目标的双量估计法相比,效果更加显著。

表2 复原度和相对平均测距误差Tab.2 Recovery and relative mean ranging errors
4 结 论
GM-APD激光雷达在透雾成像时因受到雾的影响导致回波信号减弱,本文改进了MIT提出的Gamma后向散射模型,提出了单量估计算法,利用真实情况下的数据计算衰减系数,再对散射次数进行估计,得到适用具体实验数据的后向散射模型分布,并将最大值归一化后完成模型对消,得到目标信息。仿真验证和实验表明,室内两种雾气浓度环境下,对实验采集到的多帧数据进行处理,衰减系数为0.11 m-1时,单量估计法相比峰值法,距离信息恢复量提升8.26%,目标复原度降低16.22%;衰减系数为0.86 m-1时,单量估计法相比峰值法,距离信息恢复量提升86.86%,目标复原度提高20.51%;衰减系数为2.37 m-1时,单量估计法相比峰值法,距离信息恢复量提升253.19%,目标复原度提高53.44%。由此可见,在衰减系数较大的情况下,与峰值法和双量估计法相比,单量估计法在透雾成像中的目标复原度更高,能够精确识别目标信息。
猜你喜欢
北京测绘(2022年5期)2022-11-22
扬子江(2022年4期)2022-07-04
扬子江诗刊(2022年4期)2022-07-01
汽车观察(2021年8期)2021-09-01
江南诗(2020年5期)2020-10-15
山花(2020年6期)2020-06-19
中国交通信息化(2019年1期)2019-03-26
无损检测(2018年11期)2018-11-28
电子制作(2018年16期)2018-09-26
现代测绘(2018年5期)2018-02-18
