
小体积长焦距激光指向监测装置研制
2021-07-14 15:51徐新行陈昌博
光学精密工程 2021年6期
张 飞,徐新行,陈昌博
(1.许昌职业技术学院,河南 许昌461000;2.中国科学院 长春光学精密机械与物理研究所,吉林 长春130033;3.中国科学院大学,北京100049)
1 引 言
激光干扰系统凭借作战效率高、作用距离远和响应速度快等优势,被越来越多地应用于现代军事领域[1-4]。随着光电侦察及光电制导技术应用波段的不断拓宽,对光电对抗系统提出了新的要求[5-8]。尽管近年来国内在多波长一体化激光器技术方面取得了突破,但其输出功率水平尚难以满足工程要求。采用多台不同波长的激光器通过合束实现宽波段激光的同轴输出,是目前光电对抗领域最常用的技术手段[9-12]。该技术主要包括波长合束、空间合束和光谱合束等[13-15]。其中,波长合束的应用较为成熟,合束效率也稳定,因此在光电对抗领域备受青睐[16-17],且被越来越多地应用于“骑马侍从”“魟鱼”等[18-20]国内外主流对抗设备中。
光束指向监测是实现多波长激光合束校正的基础。常用的光束指向监测方法主要包括外场远距离监测法、内场折叠光腔监测法和长焦距镜头相机监测法。前两种方法尽管监测效果较为直观,但占用空间体积大,并且无法为光束的自动闭环校正提供可执行的反馈信息,因此在工程应用中逐渐被第三种方法所取代。为了实现对可见光波段、多个波长激光传播方向的实时监测,本文基于长焦距镜头的光学聚焦原理进行多次光束折叠,并辅助高分辨CCD相机成像采集与高精度光斑提取算法,研制了一款高精度紧凑型光束指向监测装置,为多路激光的高精度闭环校正提供了技术保障。
2 指标设计
多路激光合束效果的优劣采用指向误差和位置误差两个评价指标。指向误差是指激光传播方向与基准方向之间的角度差值,反映了激光与基准的不平行程度;位置误差是指在某一截面上激光中心与基准中心之间的距离差值,反映了激光位置与基准位置的不重合度。如果两束激光存在较大的指向误差,那么它们的位置不重合度会随着激光作用距离的增大而增加。但如果两束激光严格平行,那么它们的位置误差会随着激光作用距离的增大而保持不变。由于合束激光的作用距离一般都在几公里、几十公里、甚至上百公里,因此,为了确保合束激光对远距离跟踪目标的干扰效果,对合束激光指向误差的监测与同轴校正显得更为重要。
根据激光干扰系统对多波长合束激光的光束质量和作用距离的要求,光束指向监测装置的主要性能指标如表1所示。

表1 光束指向监测装置的主要性能指标要求Tab.1 Requisite performances of beam-direction moni⁃toring device
3 光束指向监测装置设计
为了实现光束指向监测装置的性能指标,本文分别从监测装置的光电探测器、光学系统和机械结构等方面进行了详细设计与选择。
3.1 探测器的选择
根据合束激光的工作波长及表1所列光束指向监测装置的指标需求,这里选用大面阵的可见光CCD作为图像传感器,其主要性能参数如表2所示。该光电探测器不仅响应波段宽、靶面尺寸大、图像分辨率高,而且具有RJ45千兆以太网输出接口,向下可兼容100M带宽,通过网线即可实现与上位机的数据传输,无需增加模拟采集卡等器件,简化了系统配置。

表2 光电探测器的主要性能指标Tab.2 Main performance of selected photodetector
3.2 光学系统设计
在完成光电探测器的选择后,对光束指向监测装置的光学系统进行详细设计。为了压缩监测装置的长度,进一步对所设计的光学系统进行了折转优化。
3.2.1 初步光学设计
与反射式聚焦系统相比,透射式聚焦系统具有装调方便、稳定性高、制造成本低等突出优点,因此,本光束指向监测装置选择透射式系统的技术方案。光学系统的初步设计结果如图1所示,系统主要由3片透镜组成,有效通光口径为Φ52 mm,焦距为1 000 mm。
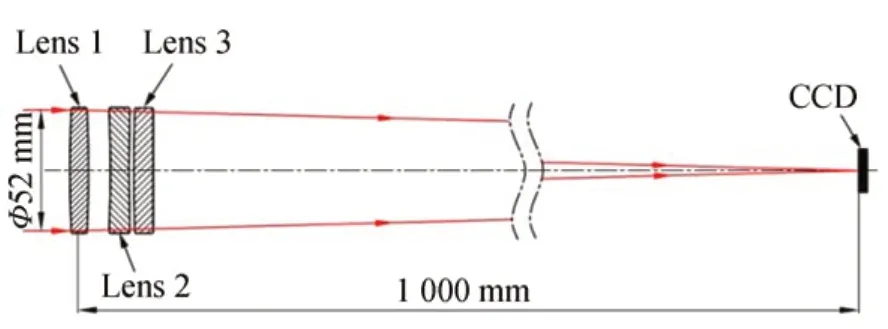
图1 光束指向监测装置的初步光学设计结果Fig.1 Primary optical design of beam-direction monitor⁃ing system
光束指向监测装置所监测光束的波段较宽(0.4~0.8μm),由于不同波长光束在透镜中的折射率不同,各波长光束的焦点产生差异。为了保证系统的监测精度,本文采用不同透镜材料相互补偿的办法对光学系统进行消色差处理。经过分析,选用H-ZK1、H-ZF6和LAK9B材料制作透镜,实现了较好的色差校正效果,各波长光束不同视场的点列图如图2所示,均小于艾里斑直径,接近衍射极限水平。
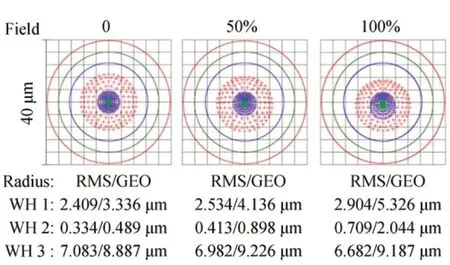
图2 光学系统点列图Fig.2 Spot diagram of optical system
3.2.2 光学系统结构优化
由于光束指向监测装置的焦距较长,而合束系统的安装空间有限,为了大幅度压缩监测装置的轴向尺寸,在初步光学设计的基础上引入6片平面反射镜对系统光路进行多次折转,并将光路分成上、下两层。图3为优化后的光学系统,经过6次折转,光学系统的长度压缩为原来的1/5左右,宽度约增加为原来的一倍,不仅实现了光束指向监测装置的长焦距,而且使装置结构更加紧凑,满足安装要求。
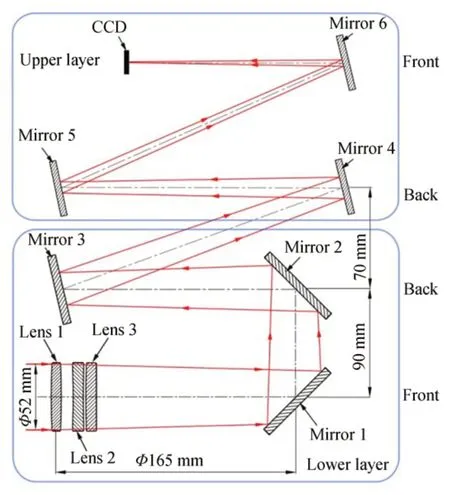
图3 分层折转的光学系统Fig.3 Double reflecting optical system
优化的光学系统在不同视场条件下针对不同波长光束的波像差如图4所示,其PV值均优于λ/4,由此可知,该光学系统具有良好的消像差效果。优化的光学系统针对不同波长的调制传递函数(Modulation Transfer Function,MTF)如图5所示,均接近衍射极限水平。

图4 优化后光学系统的波像差Fig.4 Wavefront aberration of optimized optical system
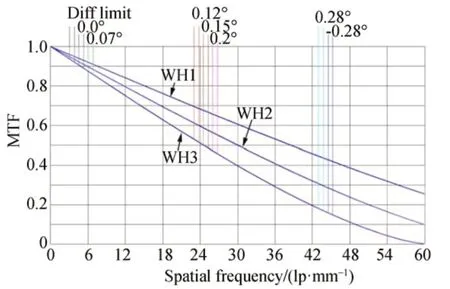
图5 优化后光学系统的调制传递函数Fig.5 MTF curves of optimized optical system
3.3 机械结构设计
根据光学系统的设计结果,光束指向监测装置的结构组成如图6所示,主要包括物镜组件、折转镜组件1~6、探测器组件、支撑基座和上盖板等10部分。为了便于光机装调,同时确保监测装置的工作稳定性,本文重点对物镜组和支撑基座等核心单元进行了详细设计与分析。

图6 光束指向监测装置的结构组成Fig.6 Structure components of beam-direction monitor⁃ing device
3.3.1 物镜组件设计
物镜组件是光束指向监测装置的核心组成之一,其组成结构如图7所示,主要包括物镜筒、透镜1~3、隔圈1,2和压圈。其中物镜筒用于实现光学系统3块透镜的支撑与调节。本设计采用3片透镜统一在一个物镜筒中装夹固定的技术方案,不仅有利于保证3片透镜的中心同轴,而且可以减小杂光的影响;采用隔圈实现各透镜之间空气间隔的调节,并通过细牙螺纹压圈完成透镜的依次紧固,不仅装调方便,而且有利于保证透镜间距的装调精度;采用外法兰实现物镜组件与支撑基座的连接,并通过物镜筒外圆进行中心定位。物镜筒与支撑基座采用3点局布接触固定,有利于确保物镜组件光轴方向的稳定性。

图7 物镜组件的结构组成Fig.7 Main components of objective group
3.3.2 支撑基座设计
为了减少外界杂光对光束指向监测装置成像质量的影响,支撑基座采用半封闭式箱体结构设计,并采用三维设计软件UG对支撑基座进行轻量化。结构优化后的支撑基座如图8所示。该基座为五面封闭式箱体结构,其四周和底面均采用外部开槽的方式进行减重,并通过“十”字形筋进行刚度加强。前端面排布有通光孔,安装底面设计有3处对称分布的凸台,用于监测装置的稳定固定及调节。

图8 支撑基座的外形结构Fig.8 Structure of supporting base
在完成光束指向监测装置支撑基座的优化设计后,进一步采用UG软件对设计结果进行有限元仿真分析,以了解支撑基座的结构刚度,确保光束指向监测装置的工作稳定性。
为了保证计算精度,支撑基座的有限元分析模型共包括20 073个单元,如图9(a)所示。其模态分析结果如图9(b)~9(c)所示。由图可知,支撑基座的1阶模态为792 Hz,2阶模态为1 079 Hz,支撑基座的结构刚度大[21],满足光束指向监测装置的应用需求。
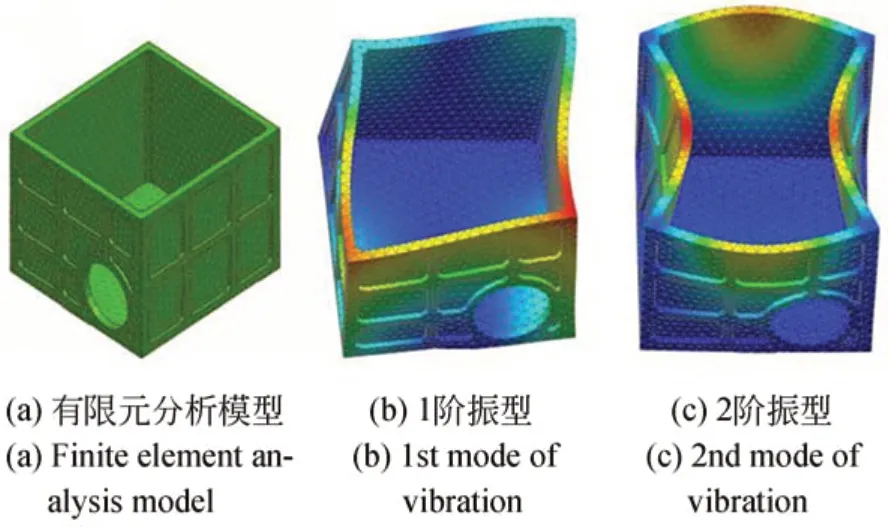
图9 支撑基座的有限元模型及模态分析结果Fig.9 Finite element model and mode analysis results of supporting base
3.4 装调误差分析
优化的光学结构在原有光学系统中插入6片平面反射镜进行光路的分层折转,实现了监测装置体积的压缩(尤其是轴向尺寸的大幅度减小),但同时也增加了系统的装调难度。为了确保装置的监测精度,需要对系统的装调误差进行分析,并在装调过程中进行校正。
3.4.1 装调误差分析
由于光学系统的光路经过平面反射镜进行了多次折转,在完成物镜组件的精密装调后,为了便于装调,选择精确装调探测器位置的方式对所有反射镜的安装误差进行补偿。所以,探测器的安装精度会直接影响监测装置的工作精度。在光学系统焦深充足的情况下,CCD的安装误差主要包括位置偏差和角度偏差,分别如图10(a)和10(b)所示。其中,CCD的位置偏差通过精密装调进行校正,也可以通过精确标定后,由监测软件调整CCD靶面的工作区域进行修正;而CCD的角度安装偏差则必须通过精密装调进行校正,以确保监测装置的精度。

图10 CCD的装调误差Fig.10 Installing errors of CCD
3.4.2 装调方法及步骤
为了获得CCD准确的安装位置与姿态,采用高精度自准直仪对光束指向监测装置进行了精密装调,如图11所示。
详细的装调方法及步骤如下:
(1)取下物镜组件,并将装调用平板玻璃紧靠在支撑基座上物镜筒的安装平面上,调节自准直仪实现它与平板玻璃的准直;
(2)精确调节CCD的角度,实现它与自准直仪的准直;
(3)将物镜组件装入支撑基座中,通过监测自准直仪“十”字光源在CCD上的成像位置,精确调节CCD的位置;
(4)重复步骤(1)~(3),直至将CCD的角度与位置均调整至较理想位置。
4 实 验
在完成光束指向监测装置的精密加工及装调后,获得监测装置的结构外形尺寸为:200 mm×180 mm×140 mm,最大通光口径为Φ52 mm。为了确保装置的实际监测效果,进一步对光束指向监测装置的焦距、调制传递函数和监测精度进行实验检测。
4.1 焦距检测
室温条件下,采用放大倍率法对光束指向监测装置物镜组件的焦距进行检测。检测装置如图12所示,主要包括光学测试平台、被检物镜组件和平行光管等。其中,平行光管由光源、珀罗板、4 m焦距离轴反射镜和测量显微镜组成。检测步骤为:首先将被检物镜组件调整至与平行光管同轴,并在平行光管(已知焦距f0)的焦面上放置珀罗板目标,已知物高为Y0。然后,在被检物镜组件的像面上用显微镜测量珀罗板的像尺寸,获得像高Y;最后,获得被检测物镜组件的焦距为:

图12 物镜组件焦距实验检测装置Fig.12 Testing experiment setup for focal of objective group
重复测量3次取平均值,最终获得物镜组件的实际焦距为1 002 mm,与设计值误差为0.2%,且大于1 000 mm。进一步计算获得监测装置的视场为8.4 mrad×7.1 mrad,大于指标要求的5 mrad,满足合束系统的应用需求。
4.2 调制传递函数检测
尽管光束指向监测装置不属于成像系统,但其显示光斑的成像质量会直接影响软件的提取精度,进而影响装置的监测精度。因此,在室温条件下,采用MTF测试系统对精密装调后物镜组件的MTF进行了实验检测。检测装置如图13所示,主要包括气浮测试平台、离轴反射式光管、可见目标发生器、像分析器及其伺服控制单元、安装有测试软件的计算机以及被检物镜组件等。

图13 物镜组件调制传递函数的实验检测系统Fig.13 Testing experiment system for MTF of objective group
实测物镜组件的MTF约为理论设计结果的80%,由此表明,该物镜组件光学系统的装调效果良好,能够保证激光光斑的成像质量。
4.3 监测精度检测
室温条件下,采用内场200 m折叠光腔对光束指向监测装置的监测精度进行检测。如图14所示,检测装置主要包括光学测量平台、激光器1、激光器2、合束镜组件、导光镜组件、主反射镜组件、激光能量衰减装置、光束指向监测装置和200 m内场折叠光腔等。完成激光合束的两路激光经主反射镜进入折叠光腔,同时经主反射镜透射的余光再次经过衰减镜组后进入光束指向监测装置进行合束激光的指向监测。
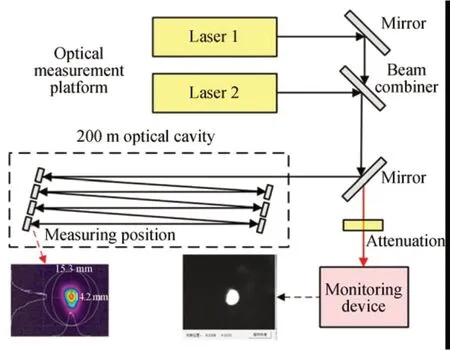
图14 监测精度实验检测系统Fig.14 Testing experiment system for accuracy of moni⁃toring device
检测过程如下:首先开启激光器1,在光束指向监测装置上获得监测光斑,微调导光镜使监测光斑大致位于视场中心,并记录下监测装置上的光斑位置;然后,关闭激光器1、开启激光器2,并微调合束镜,使监测装置上激光器2的监测光斑与上一步所记录激光器1的光斑位置重合,即完成两束激光指向的精密合束。最后,同时开启激光器1和激光器2,并在200 m光腔末端采集两束激光的质心位置坐标,进而计算两束激光的指向误差。图15为在200 m光腔末端采集的两束激光的光斑图像。经多次采集,两束激光的质心坐标 分 别 为:(14.2 mm,15.3 mm)、(13.3 mm,16.6 mm)。由此可知,两光斑的距离偏差ΔL X,ΔL Y分别为-0.9,1.3 mm。经过折算,两束激光的角度偏差ΔθX,ΔθY分别为-4.5,6.5μrad,均优于10μrad,满足设计指标要求。
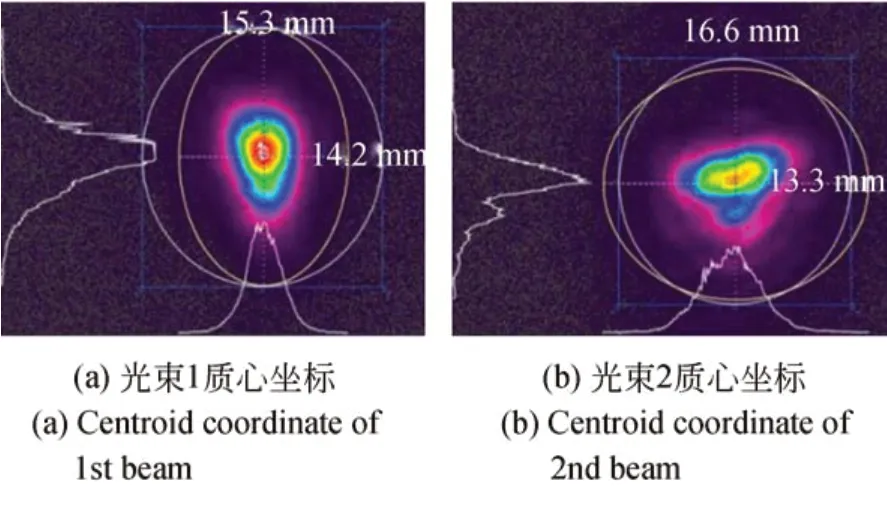
图15 200 m光腔末端光束的质心坐标Fig.15 Centroid coordinate of two beams at 200 m opti⁃cal cavity
该测量误差一方面受被测激光光束质量(光斑形状、激光能量稳定性等)的影响;另一方面受监测光束衰减效果的影响。因此,在被测激光一定的情况下,为了进一步提高光束指向监测装置的测量精度,不仅要根据激光选择衰减倍率合适的衰减片,还要通过调节探测器的积分时间、光学增益等参数,以提取更准确的激光光斑位置。
5 结 论
为了实现对可见光波段、多个波长激光束传播方向的实时监测,本文从合束系统的应用需求出发,设计了一款光束指向监测装置。该装置采用高性能的光电探测器和长焦距光学系统,具有优异的性能;另一方面,采用上下分层、多次折转的方式优化光学系统的结构,大幅度压缩了监测装置的轴向尺寸。实验结果表明:所设计的光束指向监测装置体积小、焦距大、精度高,可实时提供合束激光的监测脱靶量,以此为反馈可实现光束的自动闭环校正。该光束指向监测装置为可见光波段多路激光的高精度监测及闭环校正提供了解决方案。
猜你喜欢
摄影与摄像(2021年12期)2021-10-01
艺术品鉴(2021年21期)2021-08-15
防爆电机(2021年2期)2021-06-09
锦绣·上旬刊(2020年3期)2020-06-08
模具制造(2019年7期)2019-09-25
船舶标准化工程师(2019年4期)2019-07-24
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
光学精密工程(2016年3期)2016-11-07
物理实验(2015年9期)2015-02-28
