工业机械手的仿真设计
2021-07-13 09:38赵彦军
南方农机 2021年13期
赵彦军
(甘肃机电职业技术学院,甘肃 天水 741000)
0 序言
机械手受程序控制来完成各种要求的预设动作,在结构和性能上兼有人和机器的优点,尤其体现了人的智能和适应性。虽然机械手目前还不如人手那样灵活,但它具有能不断重复劳动、不知疲劳、不怕危险、重复精度高、抓举重物的力量比人手力大等特点,所以已普遍投入医疗、军事、矿产、焊接、物流、餐饮及产品生产线等领域中。从工业机械手的普及现状、发展趋势及应用效果来看,生产生活中,人们对其有极强的需求和依赖性。所以,机械手在未来的生产领域有着广阔的发展前景[2]。越来越多的研究者和设计人员投身其中,为提高其产品研发效率,孜孜不倦,默默耕耘。
1 机械手概述
1.1 工业机械手的组成
通常,工业机械手由驱动装置、执行机构、控制系统三大部分组成。随着工业技术的不断提升,部分智能机械手还具有检测装置、感觉系统和智能系统。其具体结构如图1所示。
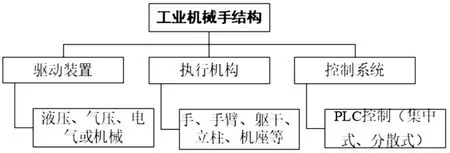
图1 机械手结构
1.2 工业机械手运动方式
工业机械手可通过机座和立柱的支撑,利用液压、气压、电气或机械驱动的方式,使立柱、手臂、手腕及手部完成相应的动作,进而实现抓取或搬运物料的目的,其运动方式如图2所示。

图2 工业机械手运动方式
2 机械手设计过程
普通机械手设计时可依据所设计机械手的工况要求,先对其完成外观结构设计,接着依据工作对象选择合理的驱动装置,然后再对其进行控制程序的设计和仿真。随着工业机械手应用规模的日益扩大,当前对其设计时多采用模块化的思想[3]。该思想就是参照生产实际要求的功能,把一些机构部件在现有的基础上进行组装,再配上专门设计的驱动和控制系统,就成为了能够实现既定功能的机械手。
模块化设计的优点在于可以通过模块的重组,构成不同功能、规格的产品系列。在产品的功能要求发生改变时,只需进行柔性化改造或单个构件的优化升级,通过调试后,很快又可以投入生产,降低了产品二次开发设计的成本,提高了产品设计研发的经济效益,在提高部件维护更新的同时,也提高了机械手的工作效率。
2.1 工业软件技术下的执行机构设计
依据如图2所示的工业机械手运动方式,分析各元件所需功能及工作过程。
2.1.1 所需构件
近年来,脑缺血性疾病发病率逐年攀升,病死率及致残率非常高,严重威胁到人们的生命健康,及早诊断及早治疗是避免疾病恶化、降低病死率及致残率的关键。64排CT血管造影(CTA)可准确将脑血管状态显示出来,更为客观、准确的对脑动脉狭窄程度及部位等评估[1] 。研究选取收治于本院的60例缺血性脑血管病患者,采用CTA检查,取得显著效果,现总结报道如下。
首先要有抓取物料的手部,通常为夹持式或吸盘式;其次需要有带动手部运动的臂部,常为液、气压控制的活塞缸、电气驱动的齿轮齿条及带轮机构;最后,还有对前者起支撑连接作用的底座或立柱等构件。
2.1.2 各构件功能
由于立柱要实现垂直往复的升降运动,该运动可通过配置垂直气缸,由其进排气口位置的变化而把活塞的运动转化为连杆或连接件的运动,进而实现立柱垂直升降的运动目的;同理,臂部的水平左右移动可配置水平气缸,通过其活塞的左右移动,带动手部及其下端吸盘的水平移动;手部前端的吸盘要完成吸取和放下物体的动作,可通过配置连接有真空罐的气缸而实现吸盘口排气则放下物体、吸盘口抽真空则吸附物体的动作。
2.1.3 机械手工作过程
机械手工作时,从某一初始位置开始,将实现:手臂下降、吸取物体、手臂上升、向右平移、手臂下降、放下物体、手臂上升、向左平移,直至回归原位的循环往复运动,具体工作过程如图3所示。
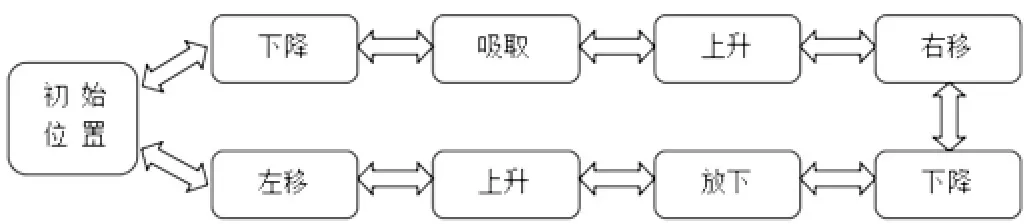
图3 机械手工作过程
2.1.4 三维模型设计
结合图2所示的机械手,利用AutoCAD、CAXA、UG或ProE等工业软件和技术软件,设计出由支架、三个气缸、立柱、臂部和带吸盘的手部组成的如图4所示的搬运机械手。
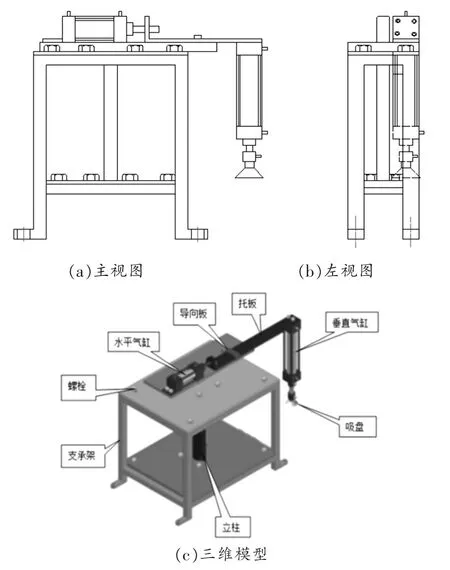
图4 气动搬运机械手
2.1.5 工业软件进行执行机构设计的特点
本例对机械手执行结构采用工业软件技术设计时,为无纸化的绿色设计。各构件组装关系可实现动态演示,故其外观结构及运动方式直观可见、清晰易懂。由于构件布局及形状易于修改,所以该模型具有传承性,不用重复设计。整个设计过程中,凸显了高效率、低成本、直观、易调整和可传承等特点。
2.2 工业软件技术下的驱动系统设计
机械手通常利用液压、气压、电气或机械方式驱动。其中液压或气压系统可通过MapleSim或FluidSIM等软件仿真设计;电气系统通过Altair Flux或CASPOC等软件仿真设计;机械驱动系统通过SolidWorks、COSMOSMotion或ProE等软件仿真设计。笔者以FluidSIM软件为例,对机械手气压系统进行仿真设计。
2.2.1 单个气压缸的运动过程
单个气缸工作时,当其下方连接的换向阀处于左中右不同位置时,气缸将执行不同的动作。换向阀左位时,气缸右移,活塞杆将带动连接件共同右移;换向阀右位时,气缸左移,活塞杆将带动连接件共同左移;换向阀中位时,各气口全部封闭,活塞杆静止不动,其运动过程如图5所示。
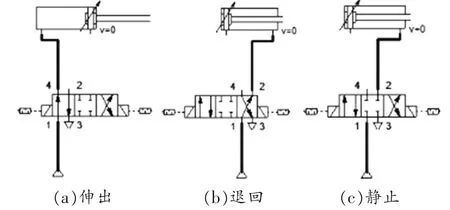
图5 单个气压缸工作过程
2.2.2 机械手气压驱动系统设计
笔者所设计的机械手按照功能要求,共需3个气缸,其气压驱动系统设计如图6所示。图6中,3个换向阀依次单个工作。当左侧第一个换向阀工作时,水平气缸带动活塞杆执行左右水平往复及中间位置静止不动的动作。当中间位置换向阀工作时,垂直气缸带动活塞杆执行垂直上下往复运动及中间位置静止不动的动作。当右侧换向阀工作,其处于左位时,吸盘口中被抽为真空而将其下方的物体紧紧吸附,实现吸取物体的目的;当该换向阀处于右位时,吸盘口中排出气体,其下方物体将被吹落,进而实现放下物体的目的;当该换向阀处于中位时,吸盘口中没有气流的进出,因无法实现物体的抓取或放下而保持不动。
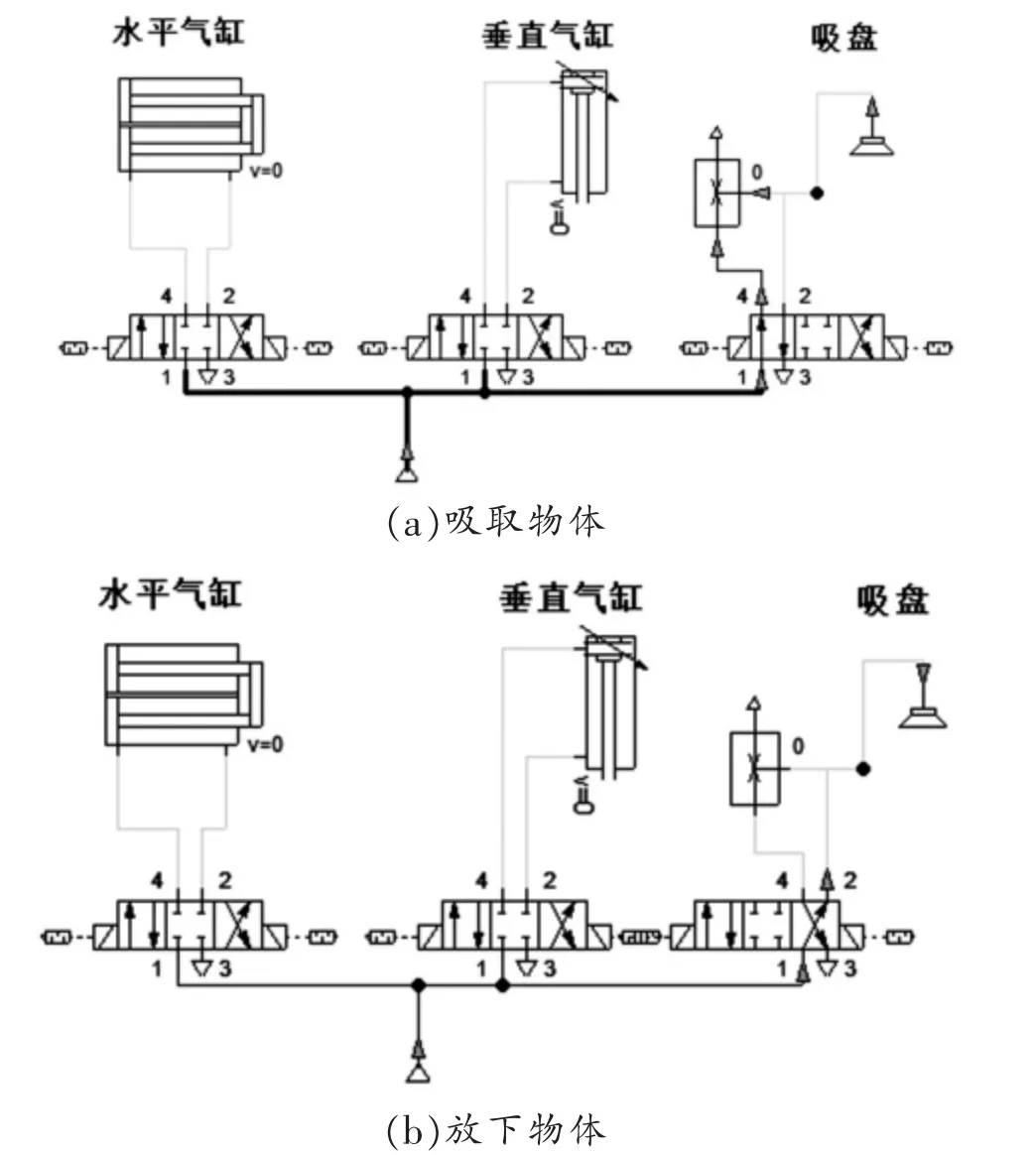
图6 吸盘工作过程
2.2.3 工业软件技术进行驱动系统设计的特点
工业软件技术进行驱动系统仿真设计时,系统构件连接灵活,只要求按预定功能执行相应的动作,没有严格的尺寸限制。系统设计完成后,可进行自动检测并有纠错提醒功能,设计者可随时调整并完善。整个系统中相关参数可进行设置,设计后期可以通过动态演示观摩系统的驱动过程。整个设计过程更趋于智能设计,仿真效果与真实驱动基本一致,具有较高的借鉴性。
2.3 工业软件技术下的控制系统仿真设计
2.3.1 设计现状
机械手最核心的部分之一是控制系统[4]。在工业机械手控制领域,PLC技术已取代传统继电接触器的控制而被广泛应用,并将迎来快速增长期。陈力、郭志冬等研究认为[5-6],机械手自动上下料系统可由PLC控制,此控制能实现机械手快速、稳定和高精度的运行及柔性化控制,此处不再赘述。
2.3.2 设计过程
常用的PLC软件有S7-200SMART、SIMATICManager STEP7、GX-developer等,设计者可依据具体条件选择。此类控制系统设计时,需要依次完成:机械手机械结构和控制要求设计、输入/输出点地址分配、控制功能图分析和设计、PLC梯形图的程序输入、程序仿真调试共5个内容。
2.3.3 动态仿真
完成控制系统编程后,设计者可通过ADAMS、MCGS或组态王等软件,通过与PLC程序的连接,进行实时数据的传输和动画的演示,如图7所示。此环节能实现程序与执行元件的同步运行,直观地展示机械手的虚拟运行状况,设计者仍可进行程序修改和完善。至此,机械手仿真设计全部完成。
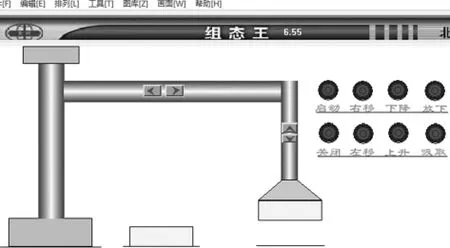
图7 吸盘机械手组态仿真
3 结束语
笔者全面搜集、整理了工业机械手仿真设计的过程,设计者可通过不同的工作场合、环境、需求而选用相应的执行机构、驱动系统、控制系统和仿真软件。本着系统布局、逐层设计的理念,完成每个环节的设计和优化。旨在为企业员工和在校学生提供机械手设计的可传承模板,为其梳理思路、指引方向、提高设计效率。
猜你喜欢
燕山大学学报(2022年4期)2022-08-01
幼儿画刊(2021年5期)2021-12-02
机电工程技术(2021年3期)2021-09-10
现代仪器与医疗(2021年1期)2021-06-09
同煤科技(2020年5期)2020-10-27
电子制作(2019年13期)2020-01-14
环球时报(2019-07-18)2019-07-18
现代职业教育·中职中专(2018年7期)2018-05-14
中国科技纵横(2016年14期)2016-10-10
筑路机械与施工机械化(2014年2期)2014-03-01