三段式立木胸径测量方法及装置设计与试验*
2021-07-13 07:53孙林豪翁卫松方陆明任俊俊
林业科学 2021年5期
孙林豪 翁卫松 方陆明 任俊俊
(1.浙江农林大学信息工程学院 杭州 311300; 2.浙江省林业智能监测与信息技术研究重点实验室 杭州 311300; 3.浙江省森林资源监测中心 杭州 310020)
立木胸径(diameter at breast height,DBH)即距根颈1.3 m处的树木直径(孟宪宇, 1996),是森林资源清查中最重要的测量因子(冯仲科, 2002)。现阶段,我国森林资源清查立木胸径测量主要采用围尺、卡尺等工具 (黄晓东等, 2015a; Van Laaretal., 2007; Huietal., 2011; 关炳福, 2010; West, 2009),围尺不适用于测量带树刺、分泌物的树木,其较宽的尺面会导致测量误差,测量时勘测人员需双手闭合环绕树木将尺头绕树干1周再将尺面紧贴树皮最后在尺头与尺尾汇合处读数,整个过程繁琐; 考虑到普通人的臂长范围,如立木胸径超过40 cm,单人难以双手闭合环绕树木或也有可能超出围尺量程,则需要他人协助将尺头与尺尾汇合或单人标记树干后分多次测量再累加读数,大幅降低测量效率; 卡尺测量时勘测人员只需将两侧卡杆咬合树干即可读数,虽然操作方便,但卡杆和尺体尺寸若过短则量程小,若过长则携带性差,也不适宜测量胸径过大的树木。因此,需要设计一款高效、准确、便携、适用于大胸径树木测量,集成自动读数、记录和上传功能的立木胸径测量装置,以解决林业勘测人员的实际工作需求(鄢前飞, 2008; 杨磊等, 2018)。目前,国内外新兴的胸径测量装置或方法主要分为非接触式和接触式2类。非接触式是指在不接触立木树干的情况下通过光学原理测量胸径,其代表性仪器有RD1000电子测树仪(吴小平等, 2016)、无人机(刘清旺等, 2017)、激光扫描仪(Liangetal., 2013)、智能手机(Fanetal., 2018)、相机(黄晓东等, 2015b; Mokroetal., 2018a; 2018b)、超站仪(冯仲科等, 2015)和全站仪(王智超等, 2013)等,但均存在测量效率低、操作复杂、成本高、野外携带不便等问题; 接触式通常是在传统围尺、卡尺的机械原理基础上进行电子化和数字化改造,其代表性仪器有MD-Ⅱ型电子测径仪(陈金星, 2016)、电子条码尺(刘金成等, 2017)、拉绳传感器(陈金星等, 2013; 孙林豪等, 2017; 刘海洋等, 2017)等,但仍以测量长度这种单一方式换算胸径,并未从根本上解决传统围尺适用性差、操作复杂、效率低和传统卡尺携带性差、量程短等问题(Binotetal., 1995; Jiangetal., 2013)。
为实现立木胸径快速、精准测量,本研究基于三段式切臂和双角度传感器提出一种全新的立木胸径测量方法,通过该方法研制的装置具有机电结构简单、可折叠、携带方便、操作简便、作业效率高等优点,同时适用于大胸径树木测量,可实现立木胸径数据测量、上传和入库的一体化,满足森林资源清查精度要求。
1 设计与原理
1.1 机电结构设计
立木胸径测量装置机械结构如图1所示,主要由双角度传感器和三段式切臂组成。中间段切臂表面有显示屏、开关、按键、充电等开孔或开槽,内部装有PCB电路板和角度传感器; 角度传感器旋转轴承上装有法兰,用于固定左右段切臂; 装置仅重0.4 kg且在非作业情形下可折叠,便于勘测人员野外携带。

图1 机械结构Fig. 1 Mechanical structurea. 保护壳Protective shell; b. 第一角度传感器First angle sensor; c. 法兰Flange; d. 左段切臂Left arm; e. 中间段切臂Middle arm; f. 显示屏Display screen; g. 充电口Charging port; h. 开关Switch; i. 第二角度传感器Second angle sensor; j. 按键开孔Key hole; k. 右段切臂Right arm; l. 装置的折叠态Folding state of device.
装置电路结构如图2所示,由主控模块、采样模块、交互模块、储存模块、蓝牙模块、GPS模块和电源模块组成。主控模块用于控制和数据处理,采用STC15系列增强型单片机,具有高速、低功耗、超强抗干扰和低成本等优点; 采样模块的第一角度和第二角度传感器分别用于测量所对应相邻切臂间的夹角,为12位霍尔式P3014-V1型,通过模数转换芯片得到角度,角度的最小分辨率为360°/212≈0.088°; 交互模块包含显示屏和按键,用于操作人员查看数据或输入指令; 储存模块内嵌2 GB大小SD卡,用于存储测量数据; 蓝牙模块采用HC-05主从一体型蓝牙,用于与上位机通信,上传SD卡中已存数据; GPS模块和采样模块的温湿度计用于测量样地位置和温湿度; 电源模块主要由锂电池、电源管理芯片和开关组成,具有供电、充放电、短路保护和升降压等功能,其中锂电池容量4 000 mAh,连续工作时长约50 h。

图2 电路结构Fig. 2 Circuit structure
1.2 方法与原理
1.2.1 主要结构 立木胸径测量装置主要机械结构如图3所示,A1、A2、A3为切臂,呈“操场”形,三者宽度和两侧圆弧直径同为w=5 cm,A2上两侧圆弧的圆心距L=30 cm,A1和A3上两侧圆弧的圆心距同为L1=25 cm,A2即装置的最大长度L2=35 cm。r1、r2分别为两角度传感器旋转轴承的旋转中心,A1、A2在长度方向上的中轴线穿过旋转中心r1,基于A2中轴线顺时针方向上的活动夹角为α; A2、A3在长度方向上的中轴线穿过旋转中心r2,基于A2中轴线逆时针方向上的活动夹角为β;α和β的有效测量范围同为0~180°。

图3 主要机械结构Fig. 3 Main mechanical structure
1.2.2 测量情景与计算方法 本研究的测量思想是: 将待测立木树干近似看作一个圆柱体,切臂A1、A2、A3与待测立木树干在胸高断面上相切,在水平切面下依据2个夹角不同划分出以下6种情景: 1) 情景S1,双锐角,如图4a所示; 2) 情景S2,一锐角一直角,如图4b所示; 3) 情景S3,一锐角一钝角,且α+β<180°,如图4c所示; 4) 情景S4,一锐角一钝角,且α+β≥180°,如图4d所示; 5) 情景S5,双直角,如图4e所示; 6) 情景S6,双钝角,如图4f所示。
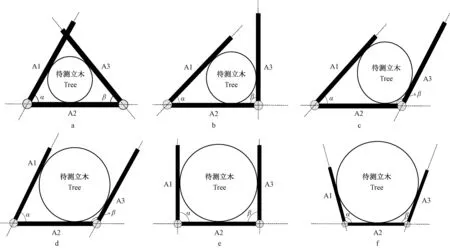
图4 测量情形Fig. 4 Measuring situations
设待测立木胸径为d,上述6种情景根据角度和大小采用以下2种方法计算。
方法1: 当0°<α+β<180°时,为情景1、情景2、情景3的胸径计算方法,利用正切定理、余弦定理和海伦定理得下式可计算出d:
(1)
式中:γ=180°-α-β。
方法2: 当α+β≥180°且α<180°、β<180°时,为情景4、情景5、情景6的胸径计算方法,利用正切定理、正弦定理得下式可计算出d:
(2)
1.2.3 模拟与仿真 分析式(1)、(2)可知: 在满足0°<α<180°、0°<β<180°的条件下,通过某一确定的α和β可模拟计算出唯一的d; 当角度传感器分辨率无限性小时,理论上可模拟出无限性大的胸径d。表1展示了角度和在不同范围即α+β≤S(S=80°、100°、120°、…)下所能取得的最大胸径dmax(当且仅当α=β=S/2时取得); 因本研究中角度最小分辨率为0.088°,所以当α=β=179.912°时,可得本装置最大dmax≈39 060.3 cm。建立以d(z轴)为因变量、α(x轴)和β(y轴)为自变量的函数,通过Matlab 2017b软件对函数进行三维仿真,0°<α≤179°、0°<β≤179°条件下如图5a所示,0°<α≤170°、0°<β≤170°条件下如图5b所示,0°<α≤160°、0°<β≤160°条件下如图5c所示,图中彩色网格面上的点坐标为(α,β,d)。另外,图5c的三维仿真结果能模拟出现实中绝大多数测量情形,图中红线为等胸径线,表明同一红线上的点在水平面投影高度相等即胸径d相等; 图中还有胸径d<0 cm的部分,为切臂A1和A3尚未充分展开时的测量情形,在实际使用中可忽略。

表1 在不同角度和范围下dmax取值Tab.1 The value of dmax under different range of the sum of two angles
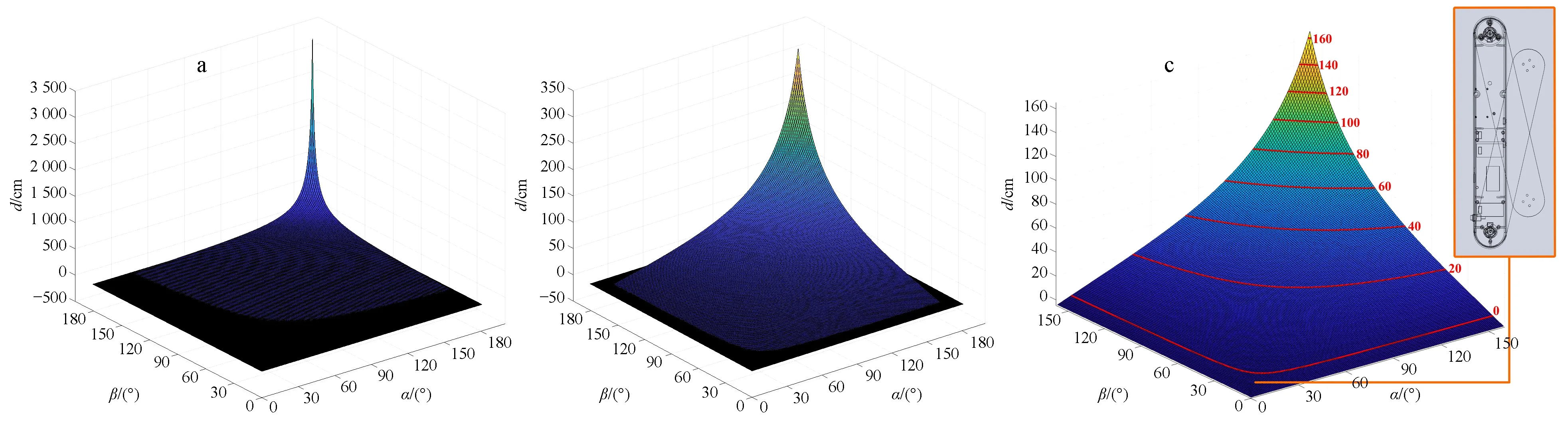
图5 三维仿真Fig. 5 Three-dimensional simulation diagrama
1.3 软件设计
装置的嵌入式软件要求具有角度测量、胸径换算、按键控制和SD卡数据管理等功能,基于Keil开发环境,采用C编程语言进行设计,其程序流程如图6所示。装置的上位机软件和测量装置通过蓝牙进行串口通信,基于预设的编码方式进行数据校验和数据传输。移动端的上位机软件基于Android Studio 3.1开发环境,采用Java编程语言进行设计,可在Android 6.0及以上版本中运行,通过调用HttpURLConnection包进行网络配置,主要实现数据实时显示、数据编辑、数据删除和数据上传等功能,便于林业勘测人员野外进行数据查看和操作,搭配手机支架的实际效果如图7所示。PC端的上位机软件基于Visual Studio 2017开发环境,采用C#编程语言进行设计,可在Windows 10、Windows 7操作系统中运行,主要实现设备信息读取、数据删除、数据统计、数据上传和数据导出等功能,便于林业勘测人员在装置单机使用情况下将采集的数据带回室内进行数据处理和分析,如图8所示。
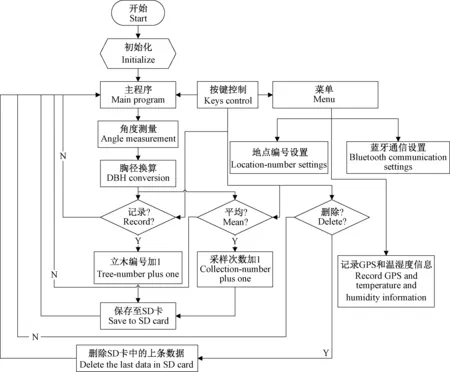
图6 程序流程Fig. 6 Program flow

图7 移动端上位机Fig. 7 Mobile terminal upper computer software

图8 PC端上位机Fig. 8 PC terminal upper computer software
1.4 测量流程设计
1) 到达测量地点后,在装置主菜单界面先设置测量地点编号,如图9a所示; 并记录样地温湿度和GPS信息,如图9b所示。

图9 装置作业Fig.9 The operation of the devicea. 装置设置图Device settings; b. 样地信息图Sample plot information; c. 大型立木采样图 Measurement of a large tree; d. 常见立木采样图Measurement of an ordinary standing.
2) 张开左右段切臂,先将中间段切臂与距根颈1.3 m处的树干相切,再将左右段切臂闭合并相切于树干,按下记录键记录树木胸径; 若立木树干较不规则,完成1次测量后改变装置三臂与距根颈1.3 m处树干的相切位置并按下平均键,重复上述操作进行多次记录,系统可自动求出平均值。实际采样效果如图9c、d所示。
3) 在测量地点依次完成每株立木胸径测量后,通过PC端或移动端的上位机软件提取数据上传至数据库或导出成Excel文件。
2 试验与评估
2.1 试验地点与对象
测量仪器为自行研制的三段式立木胸径测量装置1台以及装有PC端上位机软件的服务器1台,传统卡尺(Mantax blue牌,瑞典制,量程0~40 cm,图10a)1把,电子卡尺(浙江省林业智能监测与信息技术研究重点实验室制,量程0~40 cm,图10b)1把,传统围尺(钢围尺,太平洋牌,京制,量程0~63.7 cm,图10c)1条,电子围尺(同上,量程0~47.75 cm,图10d)1条。采样地点A为室内实验室,试验对象为15个大小不等且已知直径的标准圆柱体(直径范围5~60 cm); 采样地点B为浙江农林大学植物园(30°15′—30°16′N,119°43′—119°44′E),每株立木之间距离2~5 m,由白玉兰(Micheliaalba)、梧桐(Firmianaplatanifolia)、银杏(Ginkgobiloba)、马尾松(Pinusmassoniana)等常见树种和意大利杨(Populuseuramericana)、雪松(Cedrusdeodara)等大径阶树种组成。

图10 4种设备对比Fig. 10 Comparison of four devicesa. 传统卡尺Traditional caliper; b. 电子卡尺E-caliper; c. 传统围尺Tape meter; d. 电子围尺E-taper.
2.2 测量准确度评估
2.2.1 评估指标 设基于三段式切臂和双角度传感器方法研制的立木胸径测量装置测得的胸径(直径)为xi,其参考比较值为xir。采用式(3)、(4)、(5)、(6)分别计算平均绝对误差(mean absolute error,MAE)、平均绝对百分比误差(mean absolute percentage error,MAPE)、均方根误差(root mean square error,RMSE)和相对均方根误差(relative RMSE,RRMSE)等指标,计算公式如下:
(3)

(4)
(5)
(6)
2.2.2 圆柱体测量评估结果 对于直径小于25 cm的圆柱体,采用情景S1、情景S2、情景S3进行测量,对于直径大于或等于25 cm的圆柱体,采用情景S4、情景S5、情景S6进行测量,其中情景S1、情景S3、情景S4、情景S6更换不同左右夹角组合对同一圆柱体测量多次,共计200次测量所得评估结果如表2所示。当所测圆柱体直径小于25 cm时,情景S1、情景S2、情景S3的MAE非常接近且均较小,三者RMSE类似,验证了式(1)的可行性; 当所测圆柱体直径大于或等于25 cm时,情景S4、情景S5、情景S6的MAE也非常接近且均较小,三者RMSE也类似,验证了式(2)的可行性。
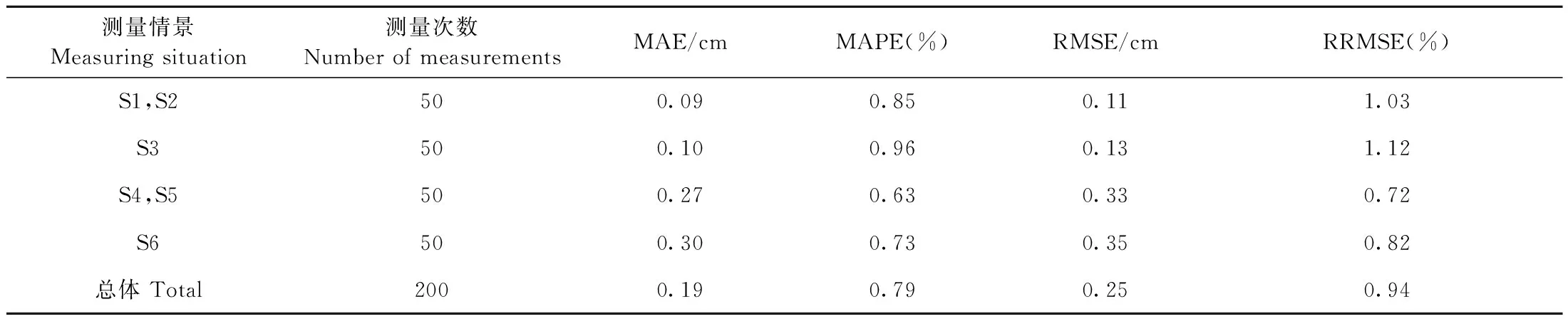
表2 不同测量情景数据对比Tab.2 Comparison of data in different measuring situations
2.2.3 立木测量评估结果 在地点B依次测量218株立木,依据树木规则程度每株立木至少测量2次并求平均值xi,以电子围尺所测数据为参考值xir进行比较,按照《森林资源规划设计调查主要技术规定》划分径阶,采用上限排外法将所测数据划分为小径阶A(5.0~12.9 cm)、中径阶B(13.0~24.9 cm)、大径阶C(25.0~36.9 cm)、特大径阶D(大于或等于37 cm)。结果表明,立木总体MAE为0.22 cm(0.89%),RMSE为0.42 cm(1.23%)。不同径阶数据的评估结果如表3所示。不同径阶误差E=xi-xir的分布如图11a所示;xi与xir的线性相关性如图11b所示,相关系数(R2)均大于0.98。

表3 不同径阶数据对比Tab.3 Comparison of data at different diameter classes
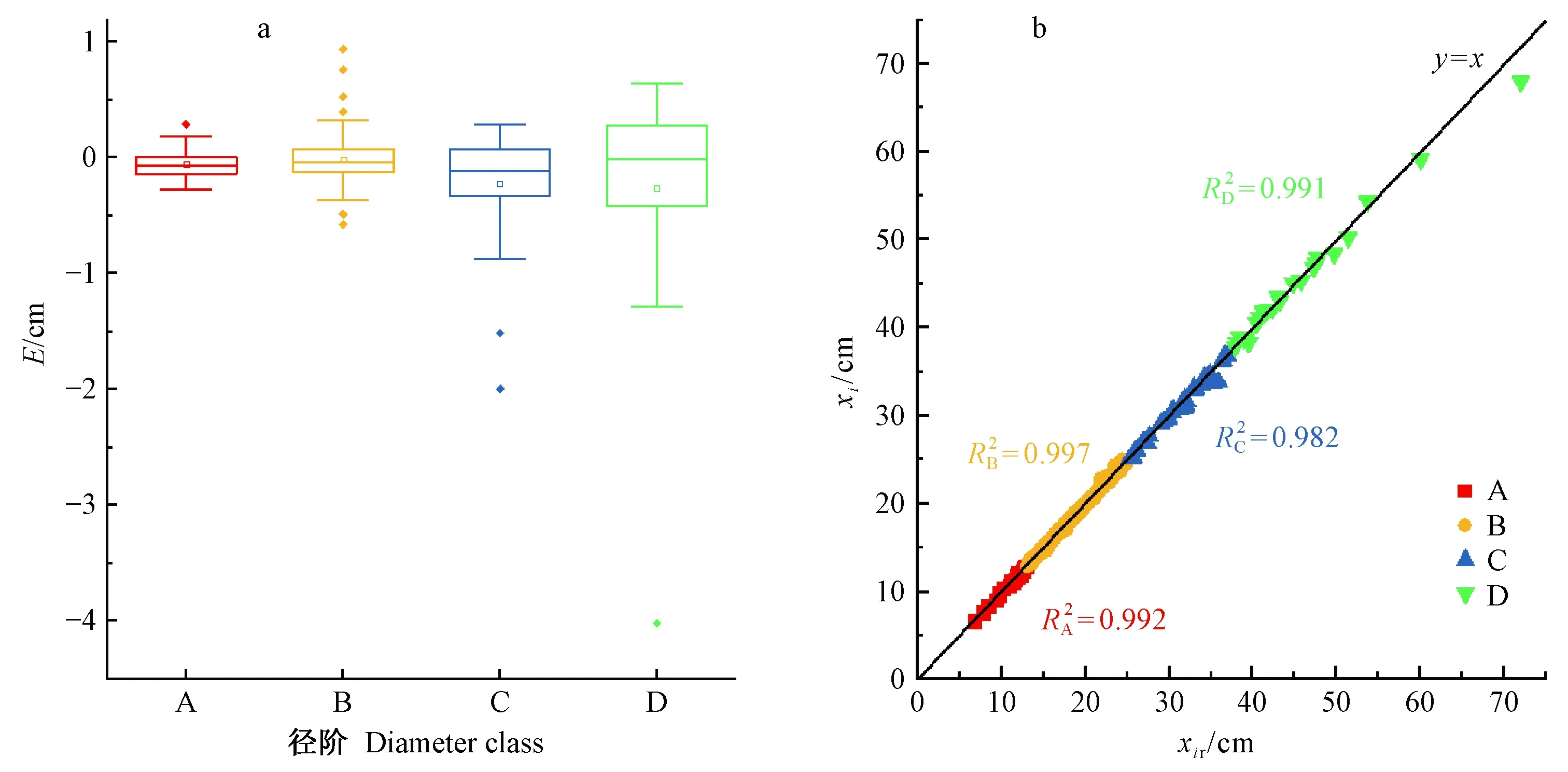
图11 不同径阶数据分析Fig. 11 Analysis of data at different diameter classesa. 误差的分布Distribution of error; b. xi与xir的线性关系Linear relationship between xi and xir.
2.3 测量效率评估
在地点B选取一块有83株立木的小样地,采用基于三段式切臂和双角度传感器方法研制的立木胸径测量装置、电子卡尺、电子围尺测量时1人1组; 采用传统卡尺、传统围尺测量时2人1组,1人测量读数1人记录,测量结束后再由其中1人将数据录入电脑。单木测量时,采用基于三段式切臂和双角度传感器方法研制的立木胸径测量装置、电子卡尺、传统卡尺依据树干规则性至少测量2次; 采用电子围尺、传统围尺依据树干是否适于单人双手闭合至少测量1次。记录并统计上述各组的外业和内业耗时(若使用电子卡尺、传统卡尺超出设备量程,则分别替换为电子围尺、传统围尺,并记录其替换耗时)。最终,计算出83株立木的平均测量耗时如表4所示。基于三段式切臂和双角度传感器方法研制的立木胸径测量装置只需单人作业,平均每株立木测量耗时8.67 s。

表4 作业效率对比Tab.4 Comparison of work efficiency
3 结论
1) 基于三段式切臂和双角度传感器方法研制的立木胸径测量装置,可实现立木胸径数据测量、上传和入库的一体化。
2) 分析15个圆柱体200次测量以及不同径阶218株立木测量所得评估结果发现,基于三段式切臂和双角度传感器方法及依据该方法研制的立木胸径测量装置能够满足森林资源清查精度要求,对于有圆柱体测量需求的其他工程领域也具有参考价值。
3) 基于三段式切臂和双角度传感器方法研制的立木胸径测量装置只需单人作业,平均每株立木测量耗时8.67 s; 相比传统测量方法,无需手工记录和录入数据,省时省力; 相比电子围尺类方法,效率更高,操作简便; 相比电子卡尺类方法,效率略高,携带方便; 测量大径级树木时,只需将三段式切臂触碰树干即可,在森林资源清查工作中具有广阔的应用前景。
猜你喜欢
湖南林业科技(2022年4期)2022-08-29
疯狂英语·初中天地(2022年2期)2022-07-07
防护林科技(2021年3期)2021-09-12
劳动保护(2019年3期)2019-05-16
福建中学数学(2018年1期)2018-11-29
37°女人(2017年8期)2017-08-12
滇池(2017年7期)2017-07-18
小天使·一年级语数英综合(2017年3期)2017-04-25
小天使·一年级语数英综合(2015年8期)2015-07-06
南方农业·下旬(2014年2期)2014-09-23