船舶转向速率指示器在超大型船舶港内操纵中的应用
2021-07-11 11:13安存刚
中国水运 2021年4期
安存刚

摘 要:本文介绍了船舶转向速率指示器的主要用途,从超大型船舶旋回操纵、停车趟航以及贴靠码头3個方面,阐述了船舶转向速率指示器在港内操纵中的应用。
关键词:转向速率指示器;超大型船舶;船舶港内操纵
中图分类号:U675 文献标识码:A 文章编号:1006—7973(2021)04-0123-03
随着科技的发展和全球化趋势,货运船舶建造日益大型化,超大型船舶应运而生。与小、中、大型船舶相比,超大型船舶在航行、系泊操纵上都有很多不同之处,其操纵性特点主要表现为:惯性较大、主机功率与排水量之比不断下降、锚的作用下降、浅水和岸壁效应明显、失去舵效的船速较高、操纵中对拖轮的依赖增大[1]。因而超大型船舶操纵对于驾引人员来说,难度系数急剧增大,尤其是旋回操纵。
旋回操纵是船舶操纵中的难点,也是驾引人员关注的重点。当今船舶越来越大型化,水域受限时,超大型船舶的旋回操纵更是难上加难。传统的船舶旋回操纵,转向时机的早晚、转头速率的快慢、如何调整舵角、是否需要加减车以及拖轮推拉的力度,主要依靠驾引人员的经验和目测观察。随着科技的进步,电子助航仪器得到了广泛推广,其中指示船舶旋回角速度的指示器(Rate of Turn Indicator,简称ROTI),在船舶上的使用也逐渐增多,尤其是超大型船舶,基本都安装有该指示器。旋回角速度(Rate of Turn,简称ROT),它代表了船舶转向的速率,给船舶旋回操纵提供了关键数据。有的船舶在驾驶台两翼,除了安装主机转速指示器和舵角指示器的分显示器,也安装了ROTI分显示器,可见该指示器的重要性。ROTI能够灵敏且量化地指示出船舶旋回运动的快慢,它所提供的船舶旋回角速度数据,对船舶旋回操纵有很重要的参考价值。
1船舶转向速率指示器
船舶转向速率指示器,即船首向变化率指示器,用以感受陀螺仪信号,指示出船舶首向向左或者向右旋转角速度的仪器。根据IMO第73次会议对SOLAS公约第五章的修正案的规定,2002年7月1日以后建造的五万总吨以上的船舶必须安装转向速率指示器。此前要求是1984年9月1日以后建造的十万总吨以上的船舶,必须安装转向速率指示器。
“ORION 1”轮建造于2010年,是一艘载重吨为20万吨散货船,图1是驾驶台安装的转向速率指示器,其安装在了主机转速指示器和舵角指示器中间,并且比主机转速指示器和舵角指示器更加突出。
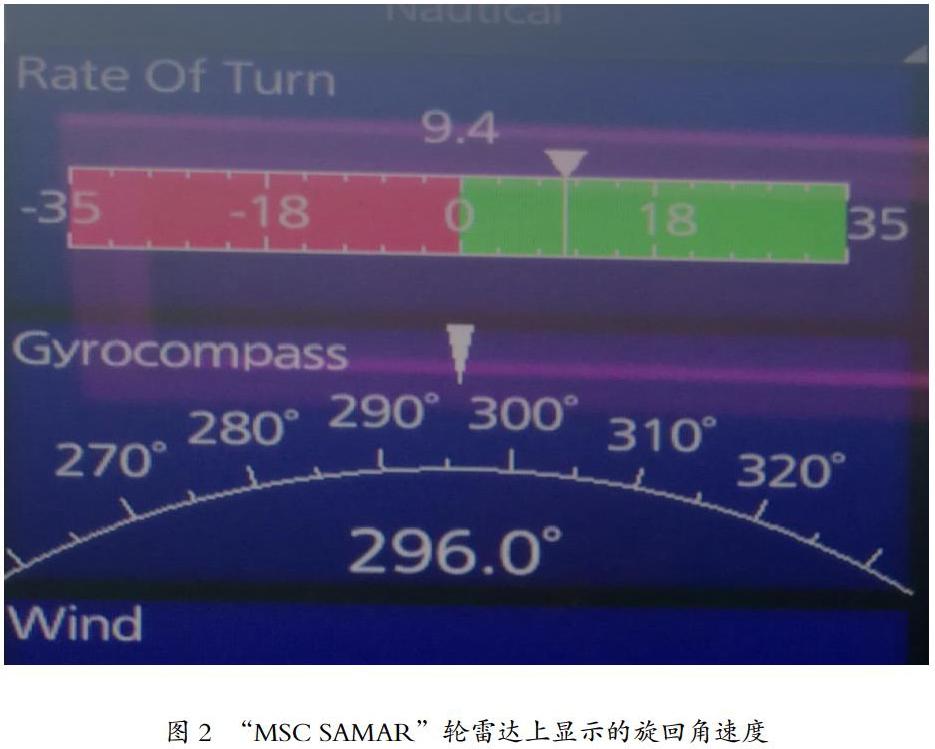
笔者引领过一艘建造于2019年的超大型集装箱船“MSC SAMAR”,船长399.9米,船宽61.5米,除了在驾驶台安装转向速率指示器外,在雷达显示屏的右上角,也给出了旋回角速度的数值,左红右绿,精度在小数点后一位。图2是“MSC SAMAR”轮雷达上显示的旋回角速度。
2 ROTI在船舶操纵中的应用
2.1旋回操纵阶段
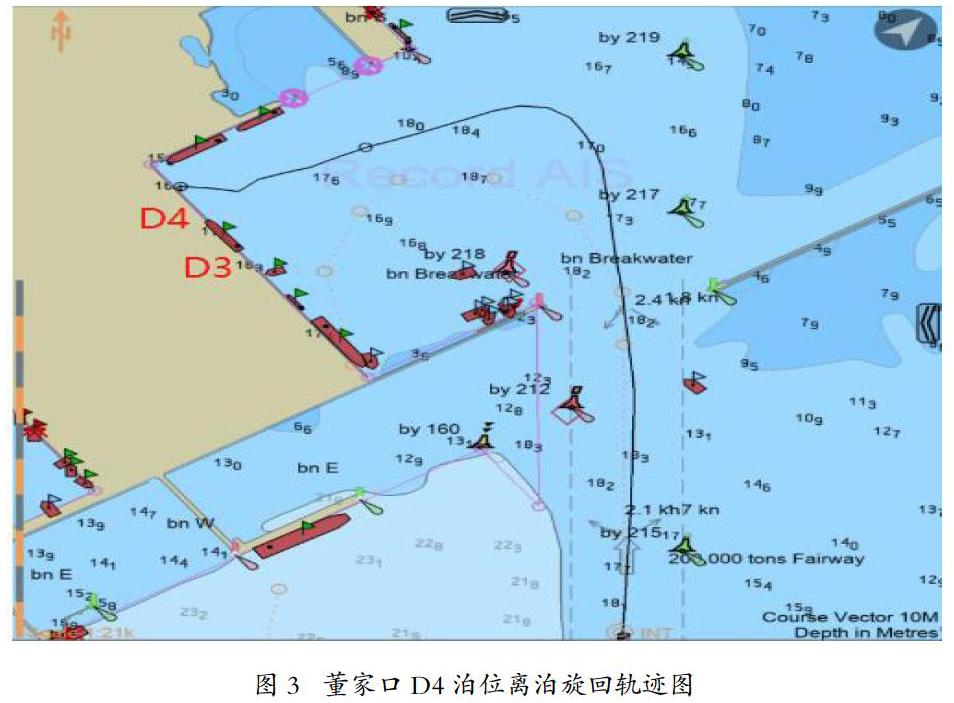
在进行旋回操纵或大角度的转向时,仅依靠目测或者经验,不可避免地出现操纵上的随意性,尤其是在受限水域中,例如狭水道、港池内,必须引起足够的重视,操纵数据应尽可能地量化,用数据来指导驾引人员的操纵措施。对于重载超大型船舶,要在旋回后将船位摆在既定的航线上,仅凭借目测和经验,难度极大,而如果利用船舶转向速率指示器,根据它提供的旋回角速度,配合雷达上的船舶真矢量线,利用车、舵以及拖轮、侧推器,进行简单而又快速的计算,让船舶以恒定的ROT进行旋回运动,就能保持船舶航行在预定的航线上,顺利平稳地完成旋回操纵。例如青岛港董家口港区,满载开普型船在D3泊位、D4泊位离泊,就是在极度受限水域中的超大型船舶的旋回操纵。图3中黑色实线是D4泊位满载开普型船离泊轨迹图。
这是在董家口港区D4泊位,满载二十万吨矿船离泊轨迹图。该港池长0.7海里,宽0.35海里,码头走向146~326°,船舶左舷靠泊在D4泊位,一般在高潮前半小时登船,高潮点开始解缆离泊。离泊调好头时的船首向在065°左右,距离左边码头岸线0.15海里,出港船首向在165°左右,需要进行一个100°的大转向,在距离出港航道左边线0.55海里时开始转向,将ROT恒定在10°/min,需要十分钟的时间来完成这个大的转向。有了时间和距离,就可倒推出船舶的速度,再结合雷达上的船舶运动矢量,就能将船舶行驶在预定的出港航道上。当然,从转向的初始阶段到达到一定的ROT,以及在转向的最后阶段,从一定的ROT到船首向稳定,也就是ROT为零,都需要一个过程。
2.2停车淌航阶段
停车淌航是靠泊操纵中重要的减速手段。停车以后,失去螺旋桨的排出流和受到伴流的影响,舵效逐渐变差,这个阶段驾引人员最关注的是船首向的稳定。在恶劣天气中,超大型船舶,特别是超大型集装箱船舶,受风面积太大,很容易出现把不定船首向的情况。船舶转向速率指示器的灵敏度要远超人的眼睛,驾引人员如果密切观察船舶转向速率指示器的变化,可以立即发现船舶的偏转,并及时压舵和短时间用车克服,能最大程度上保证船首向的稳定。而单纯用肉眼发现船舶有转向的动态,根据笔者的经验,那时船舶旋回角速度至少已经在每分钟两度以上,错过了把定船首向的最佳时机。
2.3贴靠码头阶段
对于超大型船舶,尤其是驾驶台在船头的超大型集装箱船舶,在贴靠码头时,不能有较大幅度的左右摆动,否则就很可能触碰到集装箱桥吊或码头。要避免这种态势的出现,就不能单凭借经验和目测来判断船舶的转向动态,借助于ROTI提供的ROT,在贴靠码头前,调整船舶首向和泊位走向一致,同时控制ROT保持在0°/min,左右可以稍微有点偏差,但不要大于1°/min,应以这样的态势来贴靠码头,当然拢速不能太快。
3注意事项
使用船舶转向速率指示器时,要注意船舶转向速率指示器刻度的不同,请看图4和图5。
图4最小刻度是1°/min,图5最小刻度是2°/min。图4对于船舶做旋回操纵,和图5没有太大差别,但是当用于判断船舶转头趋势以及转头速率的大小时,图5指示器就不够精确。另外现在多数船舶的综合驾驶台,都有数据化显示的船舶旋回角速度。
3.1本船操纵性能的影响
在船舶以一定的船速和舵角开始作定常回转的初始阶段,船舶由于因水流冲击舵面和横向阻力不断增大及转动惯性逐步增大等因素的影响,将会产生船速缓慢降低和转向角速度不断加大的变化。船舶只有在施舵一定时间后才能进入定常回转状态,即船速和转向角速度基本稳定,这一时间将因不同的船舶而异,即使同一船舶当其采用不同的舵角或船速进行回转时也会有所不同[2]。在施舵后应通过转向速率指示器密切观察和注意ROT的实际情况 ,如果在实际中发现原定的车、舵所得到的ROT不符合实际的需要和难以保证船舶的安全时,则应毫不迟疑地改变所采用车、舵、侧推器以及拖轮的动作 ,使ROT能满足船舶安全航行的需要。
3.2外部环境的影响
当受到外界风、流的影响时 ,船舶在回转中其首向、上层建筑和船体与风 、流的相对交角及方位的不断改变会使船舶定常回转时的船速和回转角速度发生明显的变化,即船速和回转角速度难以保持稳定,从而不可能进行常规的定常回转。因此在有较大的风、流影响时 ,在实际操纵中则应充分考虑到风流对船舶转向或回转的影响,并根据ROTI所给出的船首向变化和实际航行的需要适时地采用和改变车、舵、侧推器以及拖轮的动作,以控制好船舶的船位。
4结语
船舶转向速率指示器为驾引人员提供了一个船舶运动时的重要数据——船舶旋回角速度(ROT)。它可以提高驾引人员对船舶运动的掌控能力,特别是超大型船舶的旋回运动。驾引人员要学会使用该仪器,善于使用该仪器,不断实践和总结,积累经验,才能更好地保证船舶安全。
参考文献:
[1]洪碧光.船舶操纵[M].大连:大连海事大学出版社,2008.
[2]方泉根.回转角速度指示器在船舶操纵中的应用[J].交通部上海船舶运输科学研究所学报,1994(01):73-78.