
达芬奇机器人系统与胸腔镜在肺癌根治术中的近期疗效比较及经验探讨
2021-07-08 06:29:54张真发岳东升王勐赵晓亮李晨光高留伟陈晨王长利
中国肿瘤临床 2021年10期
张真发 岳东升 王勐 赵晓亮 李晨光 高留伟 陈晨 王长利
作者单位:天津医科大学肿瘤医院肺部肿瘤科,国家肿瘤临床医学研究中心,天津市恶性肿瘤临床医学研究中心,天津市“肿瘤防治”重点实验室(天津市 300060)
自上世纪90年代初,随着胸腔镜技术引入胸外科领域,胸腔镜肺叶切除术不断发展,术式从四孔、三孔逐渐发展为单操作孔甚至纯单孔,显著推动了胸外科的发展。胸腔镜手术在降低患者创伤的同时,其远期预后与传统开胸手术并无差异[1]。达芬奇手术机器人操作系统与传统胸腔镜相比,具有更为显著的独特优势[2-4]。本研究旨在比较达芬奇机器人手术与传统胸腔镜在临床病理因素及围手术期的手术相关关键指标,以探索机器人手术与传统胸腔镜手术的优劣,并展示手术流程及技术熟练对围手术期关键指标的影响。同时结合本中心开展的经验,探讨达芬奇机器人使用过程中的心得体会,包括器械使用、学习曲线、辅助孔设计及术中配合等。
1 材料与方法
1.1 临床资料
分析2016年8月至2020年9月在天津医科大学肿瘤医院行肺癌根治术治疗的患者病例资料,行达芬奇机器人手术肺癌根治术患者,及同期行胸腔镜肺癌根治术患者各467 例。纳入标准:1)同一手术组同期行胸腔镜与达芬奇机器人肺癌根治术的患者;2)术前所有常规化验及检查提示患者无手术禁忌证,无远处转移;3)术前未接受放化疗;4)术前未曾有胸部损伤史及胸部手术治疗史;5)既往无其他肿瘤病史;6)所有患者均使用吸入与静脉复合的全身麻醉,双腔管气管插管,健侧单肺通气;7)术后病理诊断为非小细胞肺癌;术后所有患者的肿瘤分期根据国际抗癌联盟/美国癌症联合委员会(UICC/AJCC)第8 版TNM 分期标准。两组共计934 例患者,其中男性413 例,女性521 例,年龄范围25~82 岁,中位年龄为60 岁。Ⅰ期793 例,Ⅱ期73 例,Ⅲ期68 例。其他临床病理资料,见表1。
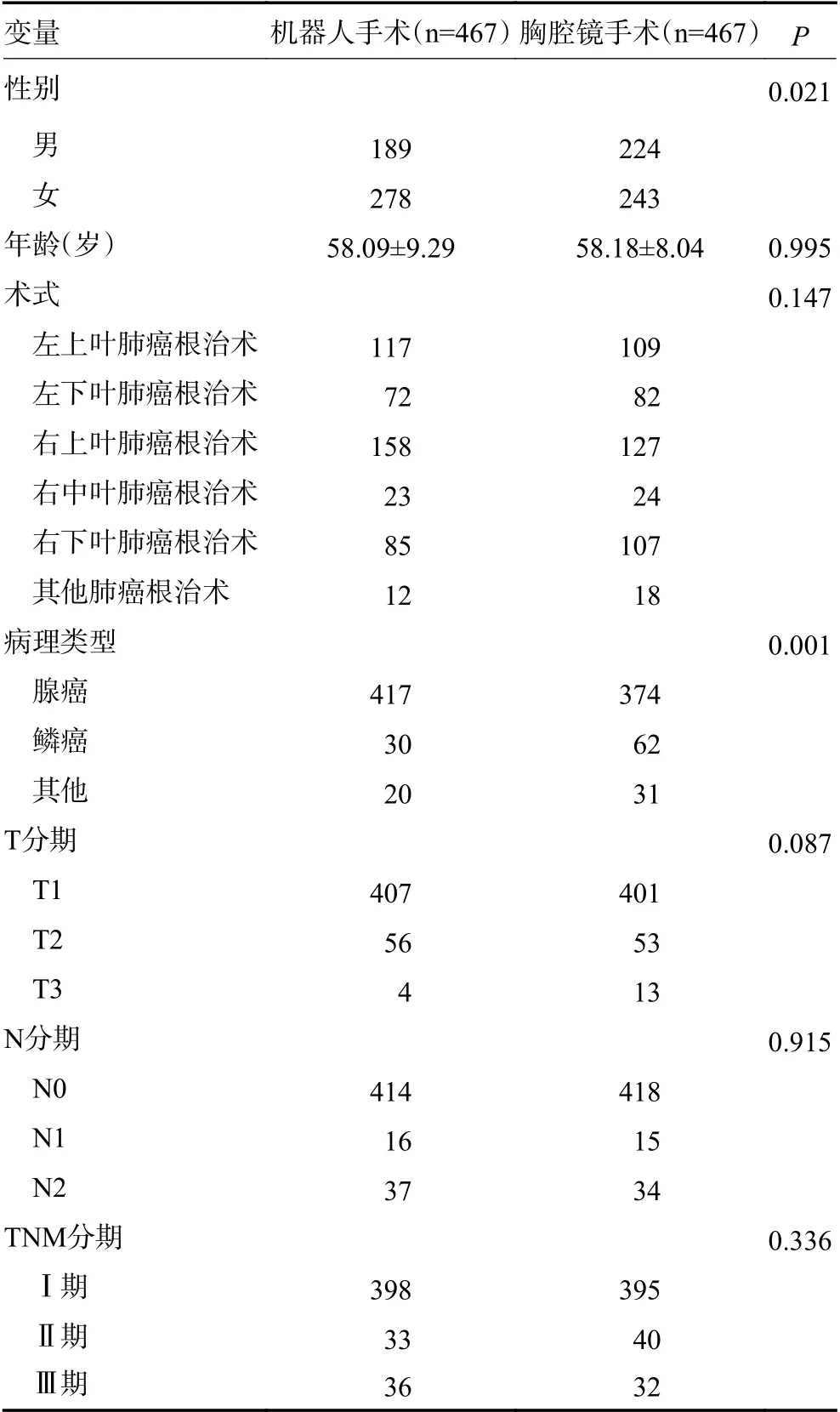
表1 934 例患者临床病理特征
1.2 方法
1.2.1 胸腔镜组 依据病变所在肺叶选取不同操作切口,一般于髂前上棘延长线第7 或8 肋间切1.5 cm作为镜孔口,在腋前线第3 或4 肋间切3~4 cm 作为主操作口,于腋后线第9 或肩胛下角线第8 肋间切2 cm作为副操作口。
1.2.2 达芬奇机器人组 取健侧卧位,双上肢屈曲抱枕于头前,下胸部垫高,折刀位。一般于腋中线第8肋间切1.5 cm 小口作为进镜口,1 cm 腹侧臂孔可选在腋前线稍微偏前第6 或7 肋间,在肩胛下线第8 肋间切1 cm 作第二臂孔,1 cm 第三臂孔位于背侧,距第二臂孔外侧8~10 cm 处,位置较固定;2~3 cm 的辅助口大约在第八肋间的肋弓起始处,距离镜头臂8~10 cm,并且使镜头孔、一臂、辅助口成三角形排列。
1.2.3 淋巴结清扫 两组手术患者如果术前病理或术中快速冰冻病理提示恶性,则直接行肺叶切除+系统淋巴结清扫术,术中淋巴结清扫的范围:右侧为第2~4 组、7~12 组淋巴结,左侧为第4~6 组、7~12组淋巴结。
1.3 统计学分析
采用SPSS 17.0 软件进行统计学分析。连续变量资料用±s表示,分类变量资料用频数及构成比表示。多组间比较采用单因素方差分析,组间比较采用t检验。以P<0.05 为差异具有统计学意义。
2 结果
2.1 两组患者术中相关数据比较
在手术时长[(125.59±31.99)minvs.(129.54±32.20)min]、术中失血[(73.52±43.85)mLvs.(99.21±57.73)mL]、 清扫淋巴结站数[(8.48±1.42 )站vs.(7.93±1.47)站]、清扫淋巴结N2 站数[(5.67±1.17)站vs.(5.35±1.14)站]、清扫淋巴结数目[(24.73±9.94)枚vs.(22.62±9.16)个],达芬奇机器人手术均优于胸腔镜,两组具有统计学差异(均P<0.05);两组中转开胸比较:机器人组7 例(1.5%),胸腔组12 例(2.6%),无统计学差异(P>0.05),其中10 例患者因较质硬固定的淋巴结包绕肺动脉或其分支无法分离而行开胸,9例因术中胸腔致密性粘连所致解离困难。
2.2 两组患者术后相关资料比较
在术后住院时间[(5.84±3.05)天vs.(5.92±2.46)天]和术后第1日引流量[(351.31±162.70)mLvs.(370.58±153.01)mL]方面,达芬奇机器人手术优于胸腔镜手术,两组差异均具有统计学意义(P<0.05);而在术后总胸引量、术后并发症例数、术后带管时间等方面并差异均无统计学意义(均P>0.05,表2)。两组的术后并发症包括肺感染、术后漏气、声音嘶哑及乳糜胸,其中机器人组44 例(9.4%),胸腔镜组51 例(10.9%)。

表2 达芬奇机器人手术与胸腔镜手术的效果比较
3 讨论
达芬奇机器人外科手术系统是美国食品药品监督管理局(FDA)批准的第一个用于腹腔微创手术的自动控制机械系统[5-6]。该系统由3 个部分构成,包括术者控制台、机器臂操作系统和成像系统。其中机械臂系统又由镜头臂和3 个操作臂构成。相对于普通的胸腔镜辅助手术,机器人辅助下肺切除术(robotassisted thoracic surgery,RATS)有着更高的可控性、稳定性和准确性,尤其在复杂手术和重建手术中优势更为明显[6-9]。创新的内转腕系统和可多维度自由活动的机械臂可使镜下手术器械重现人手动作从而达到手眼协调;操作系统可以过滤主刀医生手部颤抖对手术所造成的不利影响;此外,该系统最大的创新性是使远程操作成为可能。在胸外科领域,天然的骨性胸廓为机器人手术系统的广泛应用提供优越的条件。
有研究在纳入14 项关于比较达芬奇机器人手术与胸腔镜手术在肺外科的应用研究后(共计7 000 余例病例),提出就安全性和可行性而言,达芬奇机器人手术是胸腔镜手术的安全可靠的代替者[10]。本研究回顾分析了同一手术组在同时间段内开展的达芬奇机器人手术和胸腔镜手术,比较围手术期关键指标发现,与胸腔镜组相比,达芬奇机器人组在手术时间、术中失血量、淋巴结清扫站数、淋巴结清扫数目及淋巴结清扫N2 站数、术后住院时间、术后第1 天引流量等均有统计数差异(均P<0.05),展示出达芬奇机器人手术在手术关键数据上的优势,术者能够更好更为精细地操作,做到更少的出血,更优的淋巴结清扫,同时缩短手术时间和术后恢复的时间。
但是达芬奇机器人手术作为一项新技术在临床广泛使用之前还有部分技术瓶颈亟需攻克,从而保证手术的顺利和流畅,包括机械臂之间相互位置关系是否合理,如何在最短的时间内完成学习曲线,如何更好地模拟感觉机器手臂的力反馈,如何做到术者与助手的完美配合,以及如何选择合理的切口来更流畅更科学地完成手术。
3.1 机械手臂器械的选择
结合本课题组的经验和体会,在机器人手术操作过程中主要应用的器械包括电钩,无损伤心包抓钳和有孔双极抓钳(图1)。电钩用于组织的分离、切割、止血,相较双极电凝而言,电钩凝血、切割速度快,止血充分,但单级电凝安全性需要术者熟练操作,并且电钩在电凝过程中会由于组织气化产生烟雾,对密闭或需要压力维持的空间略有影响。心包抓钳和双极抓钳都能提供中等强度的无损伤抓持,可以对组织和血管进行牵拉暴露,心包抓钳抓持力略低,对脆弱组织或小血管的牵拉相对安全性更高。双极抓钳在提供抓持、游离、暴露的基础上,还可以辅助电钩对毗邻重要神经或组织旁小血管或组织进行更加精细和安全的止血操作,在不施加凝血动作时,配合电钩做好分离、加持的工作。此外,术中还会应用到操作针持、组织剪进行组织缝合,以及各种不同型号的施夹器对小血管进行夹闭。虽然超声刀同样可以进行组织和血管的切割,但由于刀头固定,且要配合超声刀鞘进行使用,应用场景不多,经济性有限;目前,本研究团队常规开展的肺癌根治术中,基本上由电钩、无损伤心包抓钳和有孔双极抓钳即可完成。

图1 达芬奇机器人常规手术所需器械
3.2 手术切口设计:三臂气密式切口设计及改良三臂+辅助孔切口设计
达芬奇机器人肺癌根治术在早期采用两臂加辅助孔的切口设计[11],但随着达芬奇机器人系统的应用和部分气管重建成型等复杂手术的开展,逐渐发现两臂切口设计的一些不足之处,如对上肺动脉分支的游离处理、粘连固定的淋巴结软组织的清扫以及对气道进行复杂操作时,由于肺叶的遮挡以及患者体型因素,两臂系统仍有处理不到位的情况发生,并且对助手配合及熟练程度有很高要求。此外,各个操作臂与镜头臂、辅助操作孔分别处在不同的肋间,一般会涉及3~4 个不同肋间,对于肋间神经的压迫和损伤是造成患者术后疼痛、限制咳嗽咳痰、肺感染的主要原因。因而,本研究团队将原有的两臂设计改进为三臂气密切口设计(图2)。主要的变化如下:1)在原有两臂的基础上加入辅助第三操作臂,第三臂位于背侧,距第二臂外侧8~10 cm 处,位置较固定;2)第一、二、三臂及镜头臂切口设计统一至第八肋间,镜头臂位于腋后线,侧卧位胸廓最高点,各操作臂之间距离保证在8~10 cm,视患者体型略做更改;3)取消辅助操作口,改为辅助操作孔,固定在第一臂与镜头臂之间第九或第十肋间;4)全部操作臂加用气密盖,辅助孔应用内径15 mm 戳卡,保证气密性,同时连接低流量二氧化碳气腹机,制作人工气胸,二氧化碳流量10 mmHg,流量10~12 L/min。
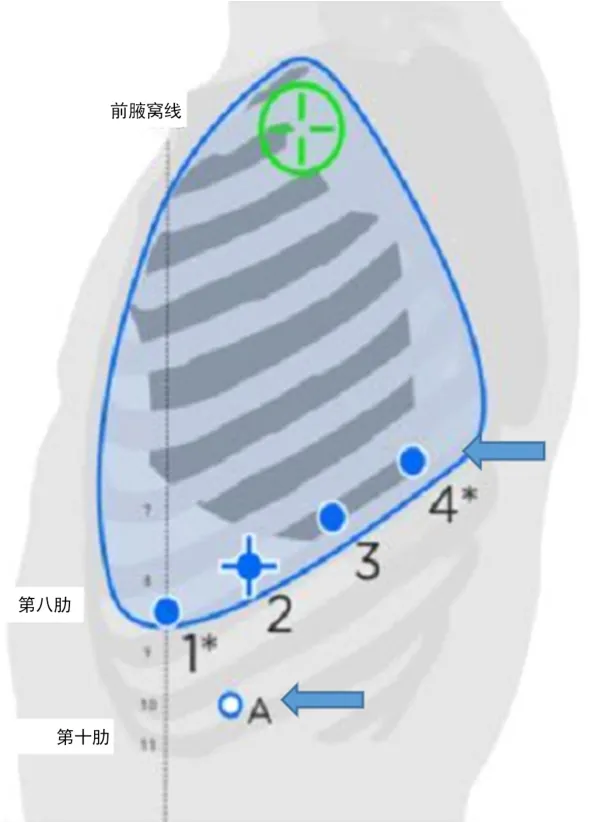
图2 三臂气密式手术切口设计示意图
三臂气密切口设计在很大程度上克服两臂系统在复杂手术中的操作困难,并提高了手术的安全性,但在应用中不可避免地产生了一些问题,例如电钩工作时产生的气化烟雾致使手术视野不清,持续性负压吸引的压力不宜掌握,压力过小造成工作效率明显下降,压力过大会造成肺组织复张,影响手术进程,手术结束时标本一般较少能通过15 mm 内径戳卡的辅助孔取出,仍需要延长切口。因而,本研究团队通过实践最终使用了改良的三臂+辅助口的手术切口设计方法,即保留三臂,取消气密气胸,将辅助孔改为2~3 cm 的辅助口并上移至第八肋间,大约在肋弓起始处,距离镜头臂8~10 cm,同时将腹侧臂孔(右侧肺手术时为4 臂;左侧肺手术时为1 臂)上移至第六或第七肋间,使镜头孔、一臂、辅助口成三角形排列(图3)。改良后的手术切口设计既保留了对肋间神经损伤最小化的优点,一定程度上也加强了助手的辅助作用,降低了内镜切割闭合器使用的难度,保证闭合血管和气管时的理想角度,提高了手术安全性。凝血器械产生的烟雾可以及时排出,克服了标本取出的困难。术后相应肋间神经根常规应用罗哌卡因阻滞,很大程度上改善了术后伤口和带管引起的神经痛,明显提高患者术后生存质量。

图3 改良三臂+辅助口切口设计示意图及全景图(上面观)
3.3 全手术流程学习曲线
能够流畅地完成达芬奇机器人辅助手术,需要一定的学习曲线。达芬奇机器人手术与胸腔镜手术的主要差别为:1)由于术者无法直接接触器械,缺少直接操作的力反馈,无法感知力度,因此增加了手术困难;2)鉴于达芬奇机器人控制系统的复杂性,因此需要做到精确的手、眼、脚协调;3)术者不在患者身边,操作过程中需要更多的助手配合操作,包括牵拉、吸引、肺裂、血管和气管的切割闭合,因此需要双方有较高的默契度。如果能克服上述问题,有助于缩短学习曲线,一般认为学习曲线至少需要5~20 例[12]。
3.4 力反馈与助手配合
普遍认为的达芬奇机器人机械臂完全缺少力反馈的观点是不准确的,当手通过机器臂抓持组织或血管后,通过3D 镜头观察组织或血管受牵拉或变形的程度,能够感受到术者自己的力道,但需要有良好的胸腔镜肺癌根治术基础,通过观察体会胸腔镜手术时组织牵拉的力度,其经验可以借鉴用于达芬奇机器人手术。达芬奇机器人系统优越的性能需要术者熟练的操控技术来实现,需要术者有良好的全身协调能力,做到眼看、手抓、脚踩的协调一致和完美配合,由开始时的“人随系统”到“系统随人”,直至最后的“人机合一”。熟练的胸腔镜手术操作技能也是非常重要的基础。最后,顺利完成达芬奇机器人手术,需要术者和助手有很高的默契度。助手要做到对术者操作的心领神会,术者器械的一个轻微动作会引导助手与其进行配合,同时助手也要对手术有充分的理解。
综上所述,达芬奇机器人具有高灵敏度和精准度的机械臂操作系统和三维立体视野,相较于传统胸腔镜具有明显的优势,达芬奇机器人手术因此在胸外科的应用越来越普及。目前,初步数据显示达芬奇机器人手术是胸腔镜手术安全可靠的替代方案,而且达芬奇机器人手术在围手术期的关键指标上具有显著优势。通过不断的优化学习曲线,提高术者与助手的手术配合,同时结合设计合理的操作孔,尤其是辅助孔的位置,能够最大程度地发挥达芬奇机器人手术操作的优势,最大化地实现“人机合一”,机器人手术将在肺部肿瘤外科治疗中占有越来越重要的地位。
猜你喜欢
保健与生活(2021年17期)2021-09-17 14:42:31
中老年保健(2021年11期)2021-08-22 03:13:36
介入放射学杂志(2021年5期)2021-05-20 09:49:04
心电与循环(2021年1期)2021-02-05 02:19:58
心肺血管病杂志(2019年4期)2019-06-27 07:36:12
作文周刊·小学二年级版(2017年6期)2017-07-12 22:35:55
中国卫生(2016年6期)2016-11-23 01:09:12
山东第一医科大学(山东省医学科学院)学报(2015年3期)2015-06-07 10:06:37
中国当代医药(2015年17期)2015-03-01 02:03:42
介入放射学杂志(2015年7期)2015-01-16 09:18:12
