
真空管道磁浮列车三电平中点钳位整流器的改进型模型预测控制研究
2021-07-07 03:29皇甫海文蔡盼盼李庆来
电气技术 2021年6期
皇甫海文 蔡盼盼 李庆来
(1. 北京交通大学长三角研究院,江苏 镇江 212009; 2. 北京交通大学电气工程学院,北京 100044)
0 引言
高速磁浮牵引变流系统具有中压大容量的特点,故一般采用多模块并联三电平中点钳位(neutral point clamped, NPC)整流器满足中压大容量的输出要求。并联三电平NPC整流系统的控制目标较多,主要包括电流跟随、单位功率因数运行、恒定的直流母线电压、中点电位平衡、并联均流控制等,次要控制目标包括降低开关频率等。
在整流器的基本控制算法中,电网电压定向矢量控制(voltage oriented control, VOC)的应用最为普遍。该方法的优点是易于实现并且具有良好的稳态和动态性能,但该方法需要调节的参数较多,且对参数变化比较敏感。为了解决参数敏感的问题,文献[1]提出了直接功率控制(direct power control, DPC)策略,DPC策略通过构建瞬时功率误差的开关表,实现对功率的直接控制,有效缓解了较为敏感的参数变化问题。但该方法在实际应用中存在功率脉动较大和网侧电流谐波较高的问题。除此之外,对于多目标系统,文献[2]指出了VOC和DPC策略的两个主要缺点:①控制结构复杂,存在多个反馈回路,进而导致动态响应缓慢;②在多目标控制系统中,PID参数的整定是一个耗时的过程,这使得控制器不易实现。
为了获得更好的控制性能,文献[3]提出了模型预测控制(model predictive control, MPC)方案,该方案根据一个特定的成本函数确定功率变换器的最佳开关状态。与PWM控制方式相比,MPC的优点主要有[4-5]:①可以在单个代价函数中增加任何必要的控制目标,更适用于多目标控制;②避免了使用线性控制方案里典型的级联结构,进而可获得更为快速的瞬时响应;③无需包含任何调制算法即可实现系统状态的直接控制。
虽然模型预测控制具有以上优点,但传统模型预测控制存在计算量大、模型参数失配、权重系数设计困难、开关频率过高等问题。例如,对于本文整流系统中的中点电位平衡问题,文献[6]直接在代价函数中加入中点电位控制,这种控制方法原理简单,但系统鲁棒性较差,当负载变化时中点电位易失控,这与不同负载下权重系数的选择有关。文献[7]通过冗余矢量控制中点电位,取得了较好的效果,但程序计算量仍然较大。文献[8]对模型预测控制进行了改进,在基本不增加计算量的基础上,能够大幅度降低电流总谐波畸变率(total harmonic distortion, THD),同时使电流跟踪性能得到提升,但未考虑开关频率的影响。针对模型预测控制方法中开关频率较高的问题,文献[9-10]提出了在代价函数中引入开关频率限制目标项的方案,这种方法有效降低了系统的平均开关频率,但未考虑负载变化时系统的谐波性能。文献[11-12]提出了一种满意预测控制策略,以目标满意代替目标最优,扩大控制自由度,为低开关频率整流器的设计提供了思路,但未考虑控制模式的频繁切换对系统鲁棒性的影响。文献[13]考虑了负载功率的变化,但是权重因子并未进行改变,可能会使系统无法处于最优的运行状态。
针对传统模型预测控制中中点电位平衡及计算量大的问题,本文提出一种改进型模型预测控制策略。系统通过冗余小矢量的选择完成中点电位平衡的控制,同时,在滚动优化时忽略未选择的小矢量。通过分析可知,与传统模型预测控制相比,在保证系统运行性能的基础上,此种方法可节省约22%的计算时间。同时,本文分析负载与权重系数对电流THD及平均开关频率的影响,提出变开关频率权重系数的控制策略,以满足不同负载情况下系统谐波和开关损耗的要求。
1 数学模型
考虑到高速磁浮变流系统中压大容量的特点,同时兼顾高可靠性的要求,系统拓扑采用如图1所示的并联三电平NPC结构。
根据图1,在三相静止坐标系下单个整流器数学模型为
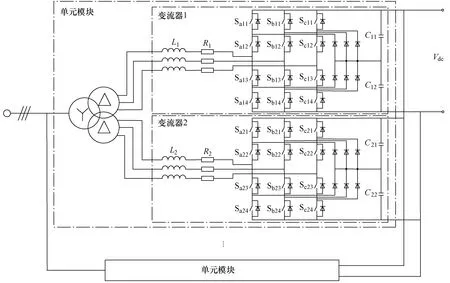
图1 真空管道磁浮列车整流系统拓扑
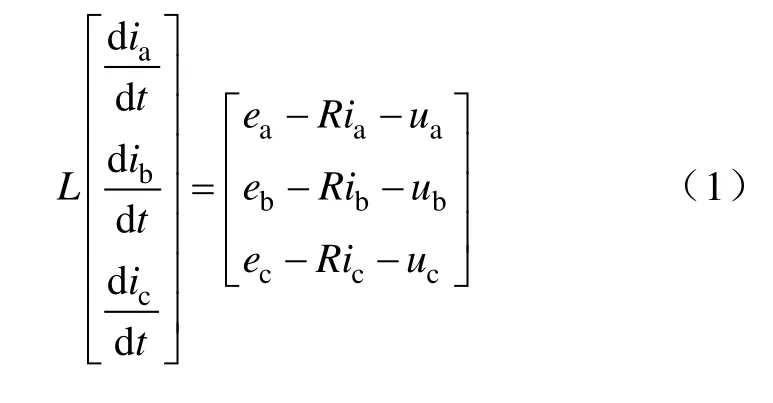
式中:ia、ib、ic为网侧三相相电流;ea、eb、ec为网侧三相相电压;L为网侧滤波电感;R为网侧线路等效电阻;ua、ub、uc为整流器输入电压。
考虑Vdc为直流母线电压,整流器输入电压可表示为

式中,x={a, b, c}。
三相中每相的开关状态可表示为
三相NPC整流器共有27种开关状态,分别对应6个大矢量、6个中矢量、12个小矢量和3个零矢量。
直流环节电容电压的动态过程可以表示为
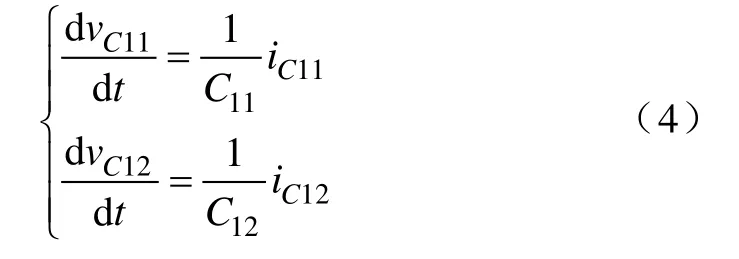
式中:C11、C12分别为直流侧上、下电容的容值;vC11、vC12分别为直流侧上、下电容的电压值;iC11、iC12分别为直流侧上、下电容的电流值。
2 传统MPC策略
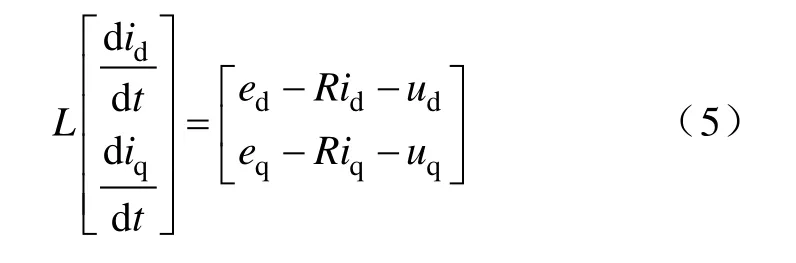
为了实现MPC算法,将三相静止坐标系下的数学模型转化为两相旋转坐标系下的模型,由式(1)可得
假设采样时间为Ts,则电流可以表示为

根据式(5)和式(6),数学模型的离散形式可表示为
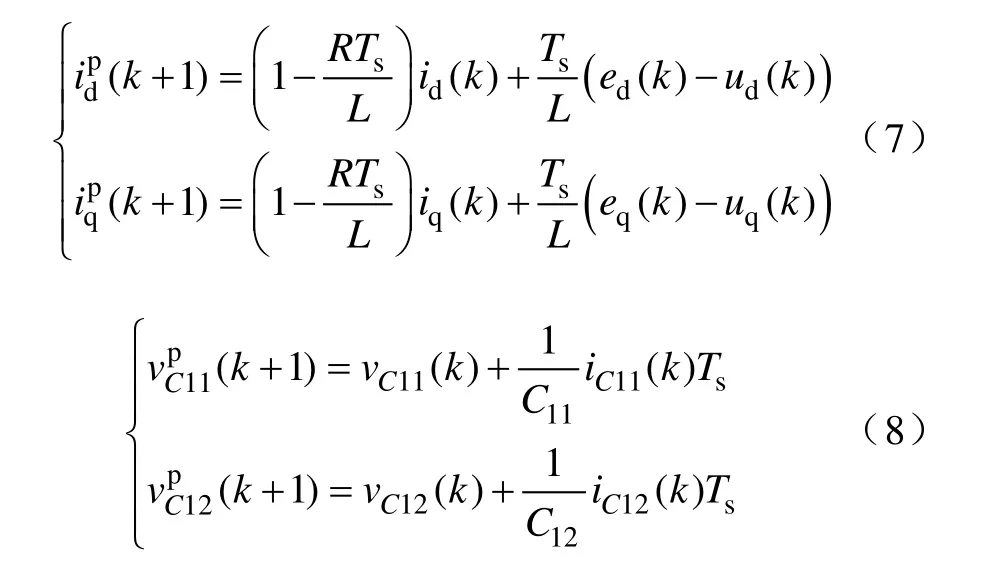
为了避免计算时间过长造成的输出延迟,采用两步预测控制方法,则第(k+2)次采样瞬间的预测为
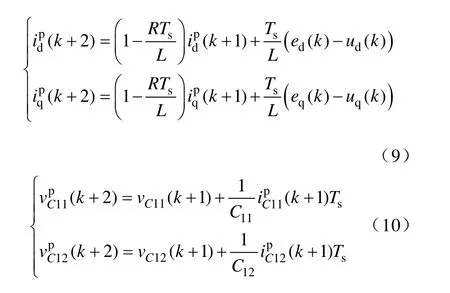
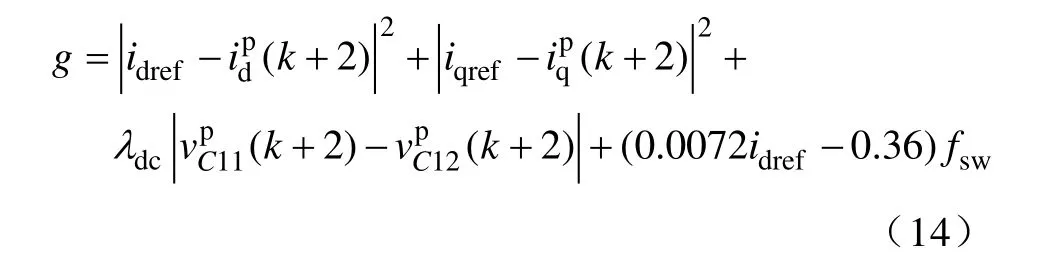
代价函数为
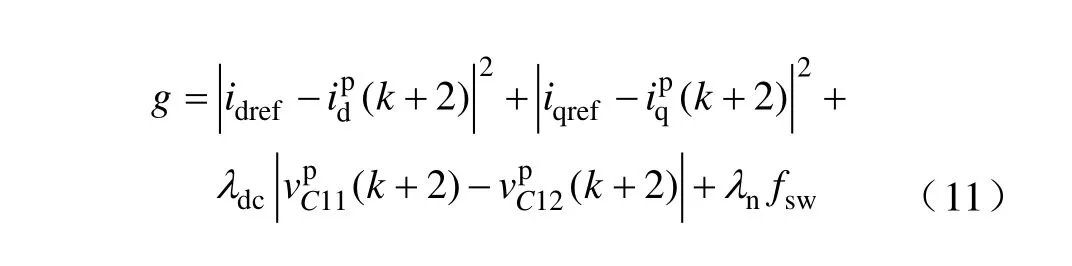
式中:λdc为中点电压平衡的相关权重因子;λn为开关频率相关权重因子;fsw为开关频率。
图2为传统MPC流程。对于三电平NPC整流器,电流跟踪和中点电压平衡同样重要。然而,在图2所示的传统有限集模型预测控制(finite control set-model predictive control, FCS-MPC)策略中,由于这两部分的权重因子设计困难,且当支撑电容的容值有差异或负载变化时,中点电压控制效果较差。此外,在多级拓扑结构中,还要考虑计算时间的问题。
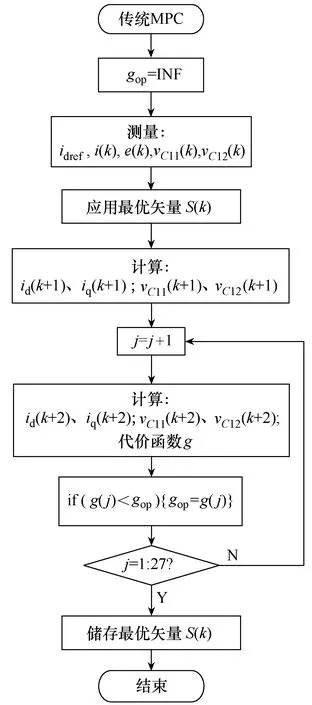
图2 传统MPC流程
3 改进型MPC策略
针对传统MPC策略存在的问题,本文提出了一种改进型MPC策略,不仅有效控制了中点电压的平衡,而且缩短了计算时间。此外,还考虑了不同负载条件下开关频率与电流纹波的关系,并对其进行优化以提高系统性能。图3为改进型MPC框图。
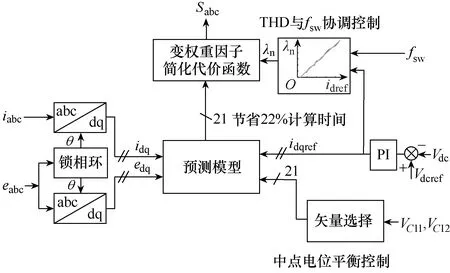
图3 改进型MPC框图
3.1 主要控制目标解耦与计算量优化
图4为三电平整流器开关状态示意图。从图4可看出,27种开关状态包含五种不同矢量:零矢量,大矢量,中矢量,正小矢量和负小矢量。下面分析五种矢量各自作用时对中点电压的影响。图5为五种不同矢量作用时的电路。由图5可以看出,零矢 量和大矢量对中点电压无影响,中矢量和小矢量的选择对中点电压有影响。同时,结合图4可以看出,对于产生相同电压矢量的两种小矢量,其对直流环节电容的充放电影响效果正好相反。故采用冗余小矢量来保持中点电位的平衡。
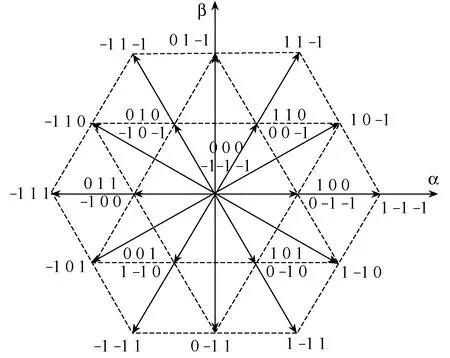
图4 三电平整流器27种开关状态示意图
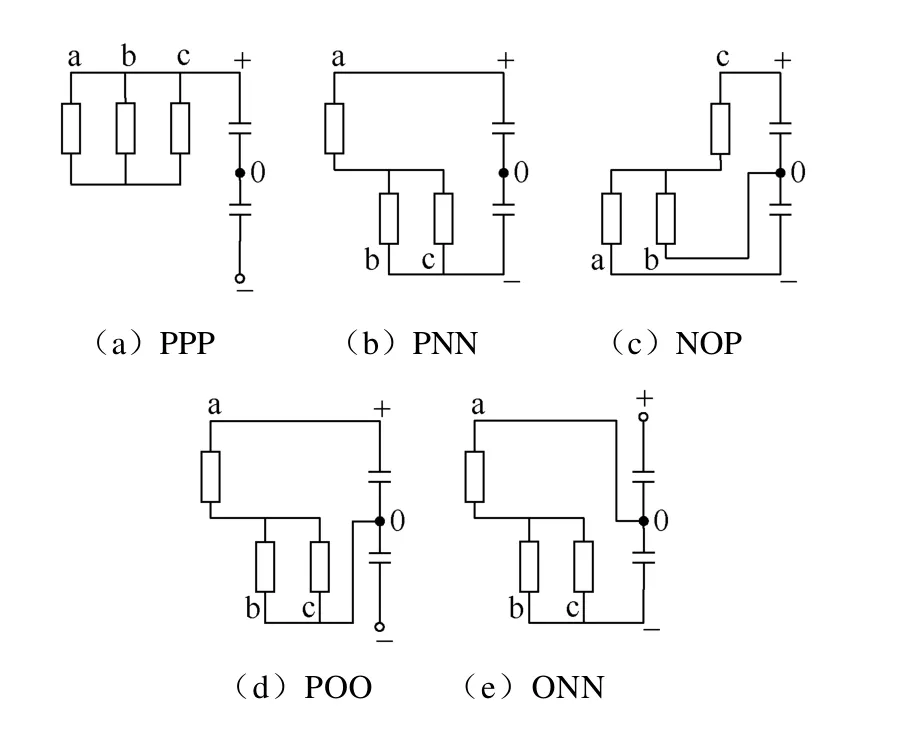
图5 五种不同矢量作用时的电路
在提出的预测控制算法中,首先通过中点电位误差值的正负判断,排除不需要使用的小矢量,进而保证中点电压平衡的目标。然后进行代价函数的滚动寻优,滚动寻优过程无需计算被排除的小矢量。传统三电平MPC策略需滚动寻优27次,所提出的MPC策略仅需滚动寻优21次即可。
本文所提控制策略将中点电位平衡控制从代价函数中解放出来,实现了系统两个主要控制目标的解耦,在保证控制效果的同时,节省了约22%的滚动优化计算时间。
3.2 系统损耗与谐波性能优化
在传统模型预测控制中,各控制目标对应的权重因子为定值,这是为了保证系统额定输出功率下性能最优。对于整流系统,网侧电流总谐波畸变率通常是衡量系统性能的一项重要指标。高速磁浮变流系统的负载为长定子直线电动机,输出功率变化较大,而整流器在轻载时网侧电流THD一般较高,故权重因子恒定的传统MPC策略可能不能满足全速域工况下网侧电流的THD要求。
本节主要分析了不同负载及不同λn下谐波及开关损耗的变化,提出变权重因子的控制策略,以保证系统更好的输出性能。由于MPC为开关频率不固定的调制算法,故定义平均开关频率如下,用以表征开关损耗。
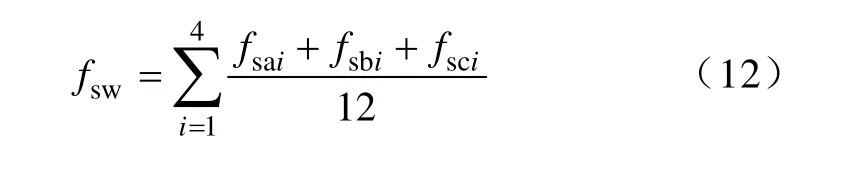
式中,fsai、fsbi、fsci分别为a相、b相、c相桥臂第i个开关管的开关动作次数。
图6和图7为不同负载及不同开关频率权重因子下,网侧电流THD和平均开关频率的变化曲线。由图6可看出,整流器在重载时,网侧电流THD较低,且受λn影响较小,故重载时,取较大的λn以保证较小的开关损耗;轻载时,网侧电流THD较高,且受λn影响较大,随λn的增加,THD有显著增加,故系统轻载时取较小的λn保证THD不超出规定范围。由图7可看出,fsw受负载影响较小,主要与λn有关。

图6 网侧电流THD随负载及λn变化曲线
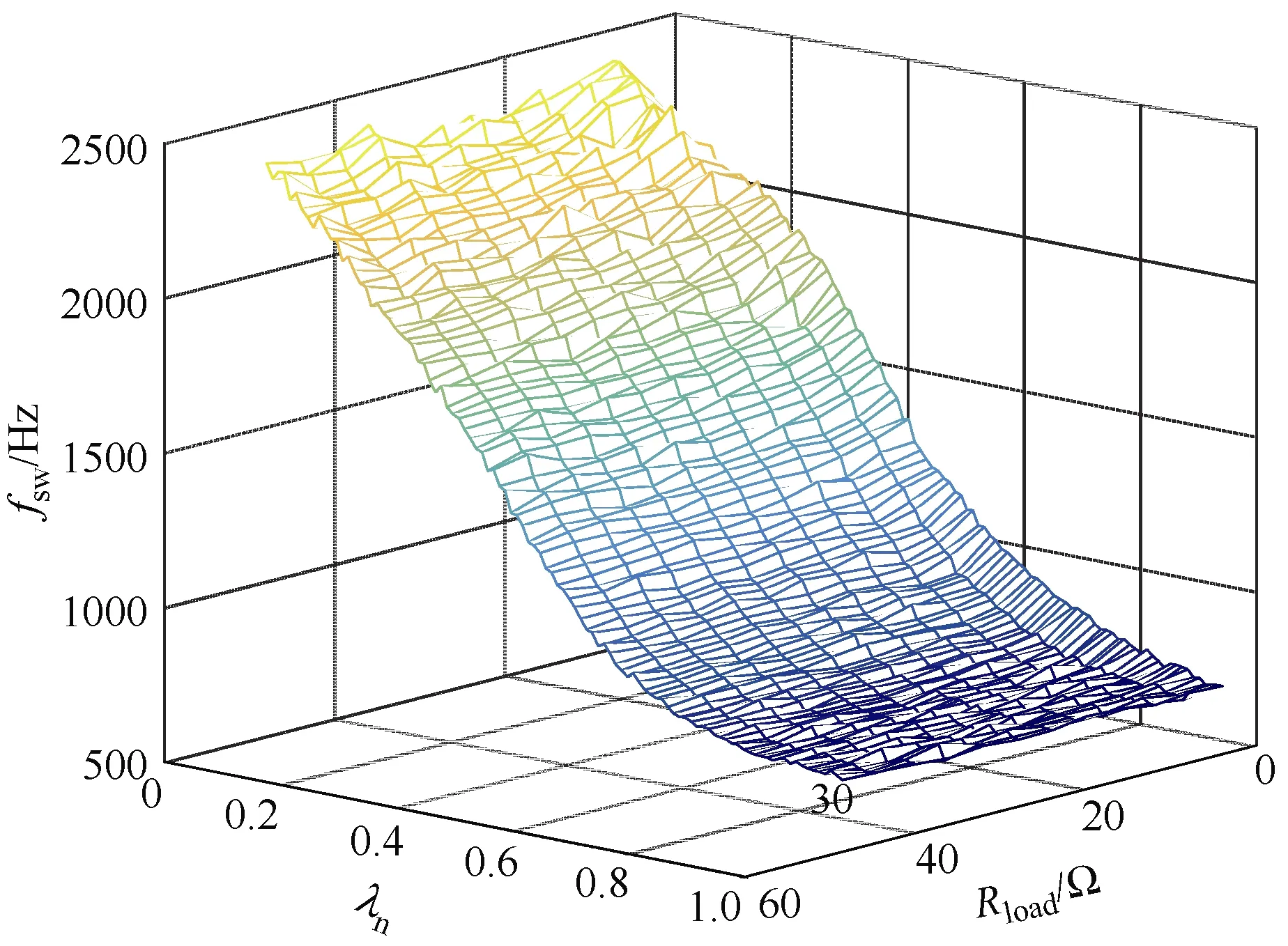
图7 平均开关频率fsw随负载及λn变化曲线
在单位功率因数运行的整流器中,d轴电流id代表输入功率的大小,故设计λn为d轴参考电流idref的函数,如图8所示。实质上,λn随输出功率而 变化。

图8 THD=5%时,λn与idref的关系
根据拟合的曲线可得权重因子λn与d轴参考电流的关系为

代入式(11)可得
λn越小,谐波抑制作用越强,但平均开关频率升高,导致开关损耗增加;λn越大,开关损耗越小,但谐波性能和系统稳定性变差,故需对λn进行限幅。输出功率P>1MW时,谐波性能符合要求,无需调节λn。同时,为保证系统稳定性,设置轻载时λn范围为0.4<λn<1。
考虑综合优化后的改进型MPC流程如图9所示。
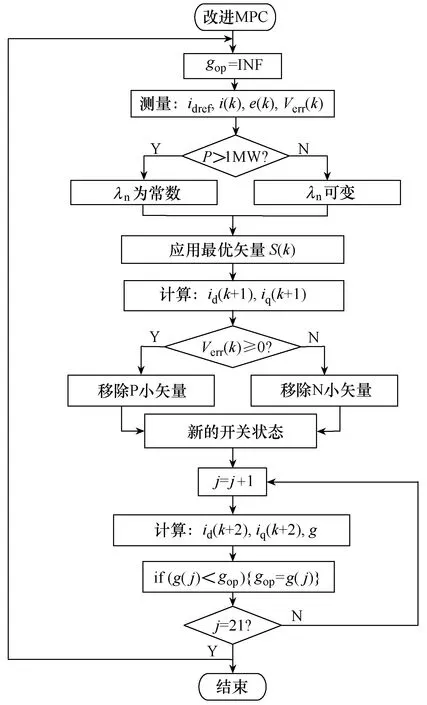
图9 改进型MPC流程
4 仿真验证
仿真拓扑如图1所示,系统单元模块仿真参数见表1。
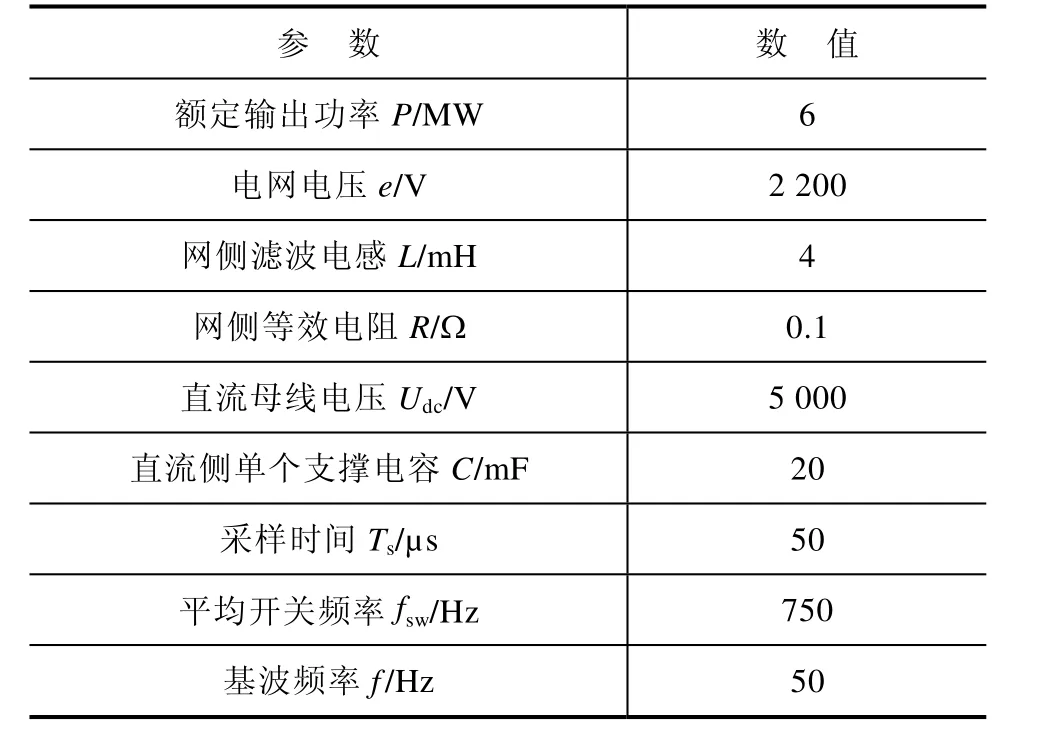
表1 系统单元模块仿真参数
为了验证控制策略的动态性能,在4s时设置输出功率由额定功率6MW下降至800kW。图10为VOC、传统MPC与改进型MPC的中点电位控制效果对比。由图10可看出,在额定输出功率时,三种控制策略均能保证中点电压的平衡。但与传统MPC策略相比,改进型MPC策略在稳态时的电容电压波动范围更小,约为+15V,而传统MPC为+40V。此外,在4s后输出负载大幅度变化时,传统MPC不能较好地保持中点电压的平衡,而改进型MPC可以迅速地调节中点电压的偏差,具有较强的中点电压调节能力和抗干扰能力。
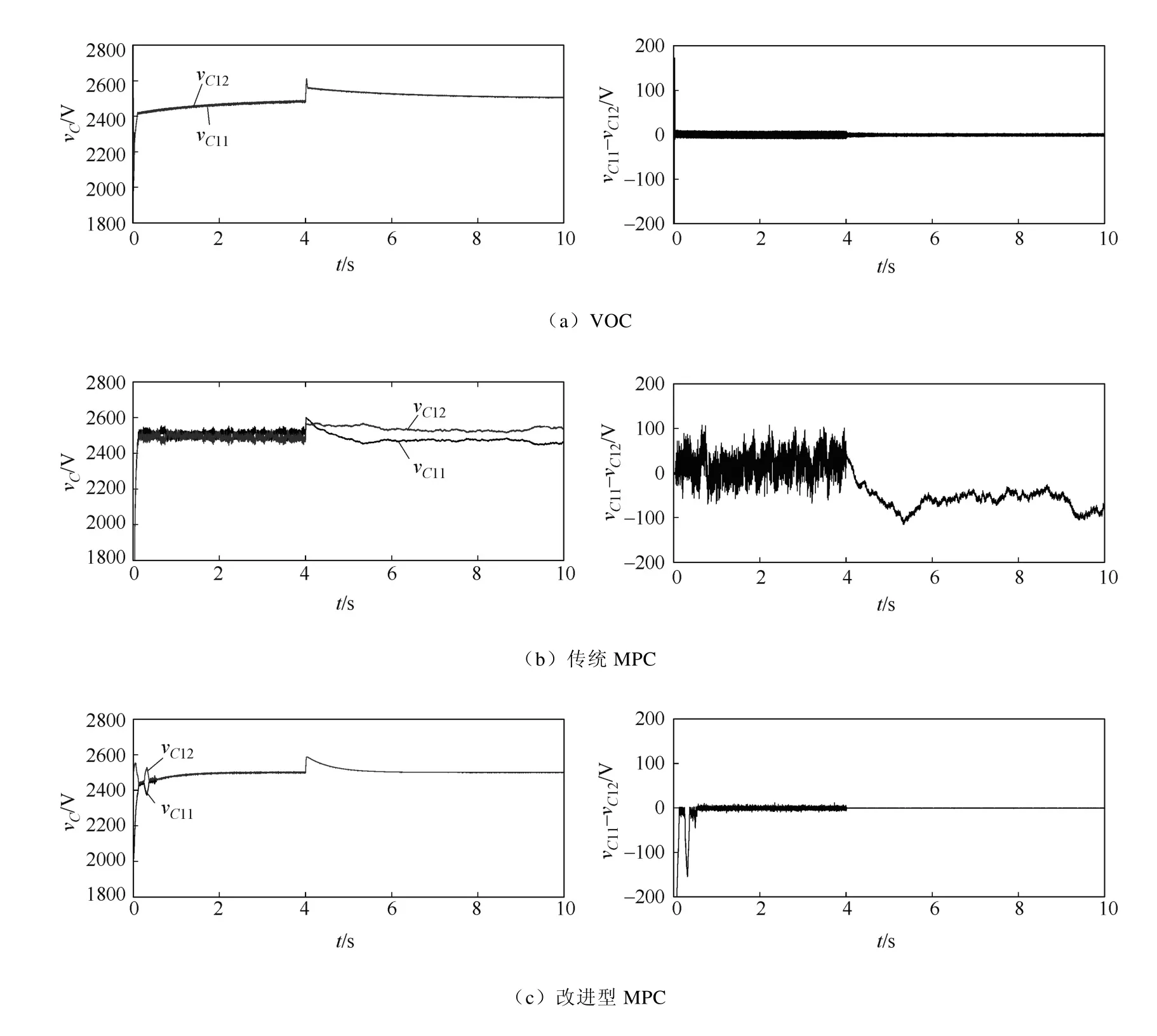
图10 不同控制策略下中点电压平衡效果
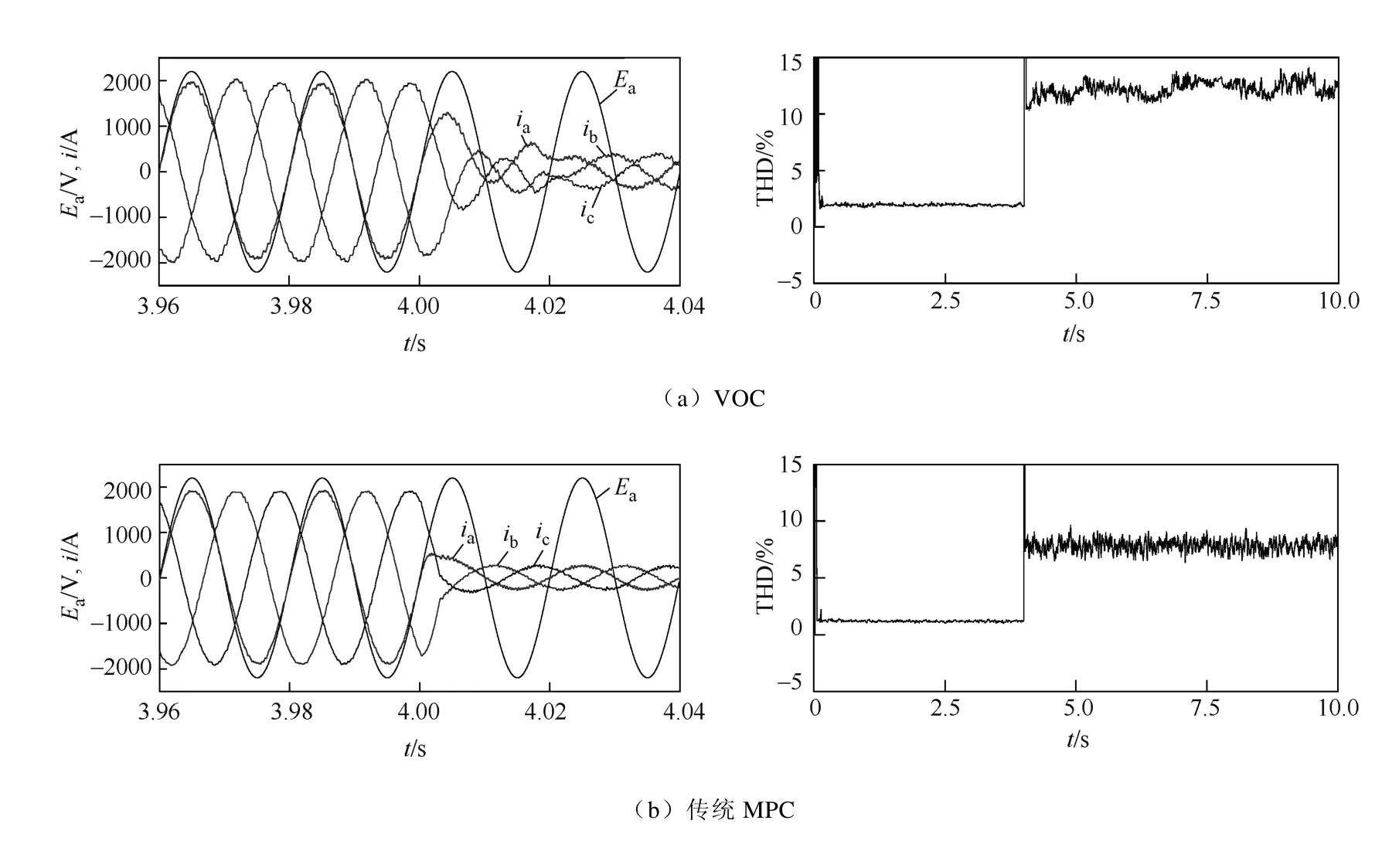
图11为VOC、传统MPC和改进型MPC的动态性能和谐波特性的对比。其中,额定输出功率时,λn的值为1,通过式(12)测得MPC策略下对应的fsw为750Hz,故设置VOC策略下载波频率为1 500Hz,以保证仿真条件的一致性。
假设系统谐波要求为网侧电流的THD<5%,由图11可看出,额定输出功率下,三者的THD均能满足要求,但在MPC策略控制下的THD更低。在4s后输出负载大幅度变化时,VOC策略下的网侧电流稳定时间较长,动态性能较差,且轻载时THD约为12%,远远超出规定范围。传统MPC策略的THD约为8%,仍不满足要求,而改进型MPC策略的 THD<5%,谐波特性满足系统要求,且动态性能较好。此时,fsw约为1 200Hz,虽然器件平均开关频率上升,但相对满载状态时,此时输出电流较小,相对的开关损耗也会较低。
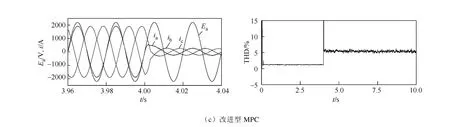
图11 不同控制策略的动态性能和谐波特性
5 结论
针对传统MPC算法应用于真空管道磁浮列车整流系统存在的问题,本文提出了相应的改进方案: 针对主要控制目标相互耦合导致中点电位控制效果较差的问题,提出冗余小矢量选择与代价函数相结合控制的方法,实现主要控制目标解耦;针对MPC在多电平拓扑应用中计算量大的问题,提出了改进的系统控制流程,降低了约22%的计算量;综合考虑系统损耗与谐波性能之间的关系,提出了一种变权重因子的控制策略,保证了系统在不同工况下均能达到谐波和损耗等性能要求。最后通过与VOC及传统MPC的仿真对比,验证了提出的改进型MPC算法的优越性。
猜你喜欢
一重技术(2021年5期)2022-01-18
中学生数理化(高中版.高考数学)(2021年4期)2021-07-20
科学家(2021年24期)2021-04-25
测控技术(2018年4期)2018-11-25
学苑创造·C版(2018年3期)2018-05-28
电测与仪表(2016年5期)2016-04-22
电测与仪表(2016年17期)2016-04-11
通信电源技术(2016年4期)2016-04-04
电源技术(2015年1期)2015-08-22
电测与仪表(2015年12期)2015-04-09
