
基于相控聚焦原理的悬浮微粒操控研究
2021-07-07 11:05马熳倩孔令昊古豪天曾天佑曾育锋
物理实验 2021年6期
马熳倩,孔令昊,古豪天,曾天佑,曾育锋,b
(华南师范大学 a.物理与电信工程学院;b.物理国家级实验教学示范中心,广东 广州 510006)
声悬浮技术是材料无容器运输以及处理的关键技术,在医药[1]、生物、材料[2]等多个领域都有广泛应用. 声悬浮研究的重点是悬浮物体在驻波声场的操纵技术,主要包括悬浮目标的移动和悬浮稳定性[3-4]. 已有报道用超声悬浮系统来操控物体在三维空间移动[5-6],其中超声相控聚焦原理是提高声场中物体可控性的方法之一.
本文采用凹球面双发射极超声阵列,形成悬浮能力较强的驻波声场,结合相控聚焦原理,利用FPGA硬件系统控制相位,从操控悬浮微粒移动的准确度和可操控范围2方面进行研究,实现微粒在三维空间中的稳定移动. 本文设计的装置不仅可以实现稳定悬浮,还可以大范围操控,实验现象直观且清晰.
将声悬浮创新实验引入教学中,不仅能激发学生的学习兴趣和主动性,通过动手实践加深学生对声学理论的理解,还能促使学生探索关于声场内物体移动运输的应用,从而培养学生的创新意识.
1 实验原理
1.1 驻波悬浮机理
超声驻波是由2列振幅相同、频率相同、沿相反方向传播的超声波叠加产生的,由此形成的声能量空间分布一定的声场称为超声驻波声场. 驻波声场由波腹和波节构成,且两者的位置不随时间发生变化. 波腹是声压幅值最大的点,波节是声压幅值为0的点.
为了单独衡量声场的悬浮能力,根据声辐射时间平均势理论[7],得到简化后的相对时间平均势公式[8]:
(1)

当声场中各参量确定,若悬浮微粒密度很小,微粒将悬浮在相对时间平均势极小值点的位置上. 此极小值点是对应声压为0的点,即为波节处. 当悬浮微粒由于重力的作用,相对波节位置有微小的偏移时,将会受到指向声压节点的回复力,使微粒回到原来的平衡位置. 若悬浮微粒的质量较大,悬浮位置将会在波节处向下偏移一段微小距离.
1.2 凹球面双发射极超声阵列结构设计
凹球面双发射极超声阵列是由双凹球壳支架和超声阵列组成,其中支架的中间与底部都设计了支撑柱,以保持装置稳定,而超声阵列是将一系列阵元(超声换能器)以多个圆环形状在球壳表面均匀排列而成,结构如图1所示,该结构能够实现自聚焦,并且悬浮能力强[3].

图1 超声阵列结构
一般情况下,凹球面阵列的阵元数量越多,声辐射力就越大,聚焦性能也越好. 但在本实验中,当阵元数量为72或100时,驻波声场的聚焦性能和声辐射力均能满足需求[3],且操控微粒全三维移动时,需要对每个阵元进行单独控制,阵元越多,FPGA资源占用越大,开发失败的风险也将越大,因此最终选取阵元数量为72的凹球面超声阵列进行实验研究.在此基础上,利用COMSOL 仿真模拟,在自聚焦的前提下,选取仿真效果符合实验目的的其他装置参量.
支架的上下球壳选取于同一球体(曲率半径相同). 为了增大悬浮微粒三维移动的空间范围,使实验现象明显,选取球体半径为109.12 mm,阵列高度为180.07 mm.
每个球壳上设计了36个圆形凹槽(包括了引脚孔),用来放置超声换能器阵元(其中心频率为40 kHz),如图2所示. 阵元以球壳中线为对称线分布于两侧,以方便计算各声源到聚焦点的距离. 其中,最里层、中间层和最外层相邻2个阵元的几何中心的间距分别为18.34 mm,18.81 mm和18.55 mm. 最里层与中间层在竖直方向的高度差为4.69 mm,最外层与中间层在竖直方向的高度差为7.77 mm.

(a)上球壳 (b)下球壳
当施加周期性变化的高频电压时,超声换能器阵列将产生机械振动,进而产生超声波. 双发射极超声阵列发出的超声波,能在2阵列中间形成超声驻波声场.
1.3 超声相控聚焦原理及阵元相位计算
超声相控阵是由一系列超声换能器阵元组成的阵列,对每个阵元施加独立的激励信号,使全部阵元发出的声波聚焦于某一位置. 超声相控聚焦原理是通过控制每个阵元声源信号的初相位,调节各声源之间的相位关系,使每个声源发出的超声波传播到预设的聚焦点位置都处于同一相位,实现声压的叠加.
本文设计的超声阵列结构上下2部分发出的超声波符合驻波产生条件,声场仿真结果如图3所示. 从图3中可以看出,在聚焦点附近形成超声驻波声场,使微粒悬浮于波节附近(其中白色部分表示声压幅值为0,即波节位置).
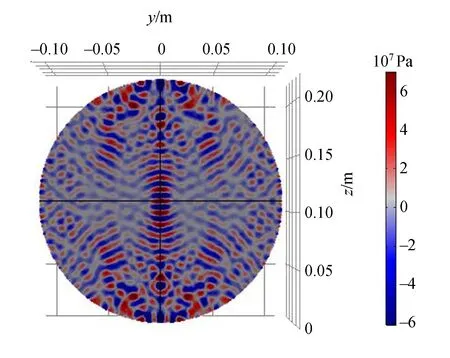
图3 超声驻波聚焦声场仿真图
阵元发射信号示意图如图4所示. 通过相位延时调节各声源的相位关系,即在每个阵元的发射信号上加相应的延时量,使距离远的声源先发射信号,距离近的声源后发射信号,从而使所有信号同时到达聚焦点.
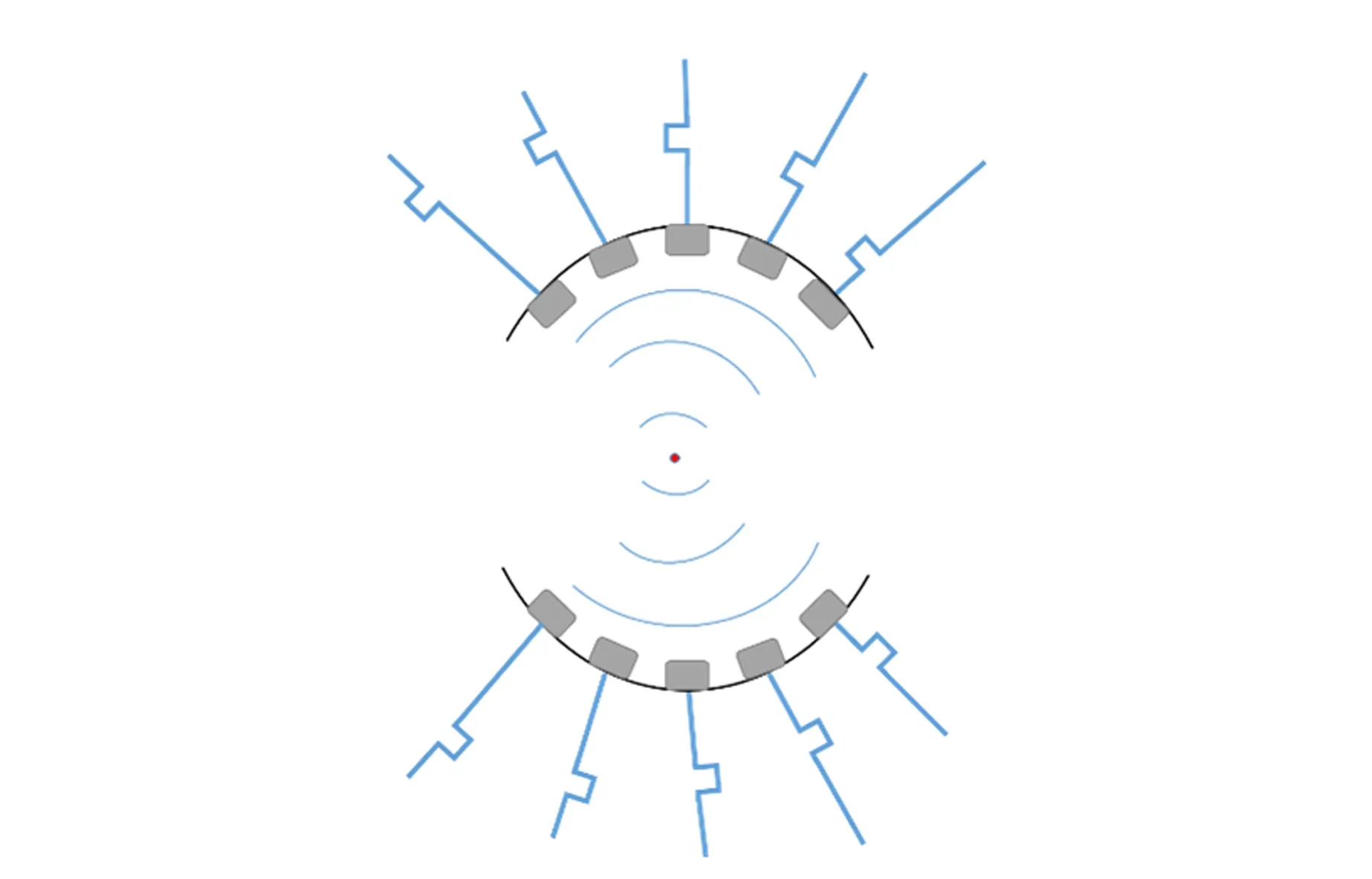
图4 阵元发射信号示意图
根据延时量可计算相位差[9]:
Δφ=2πf0Δt,
(2)
其中,f0为声源信号的频率,Δt为延时量.根据聚焦点与各阵元的位置关系,可以计算出相应的延时时间.
如图5所示,对于凹球面超声阵列,若凹球面的曲率半径为R,将换能器底部圆形凹槽的中心坐标视为声源发射点,取点P(x,y,z)讨论.其中z为
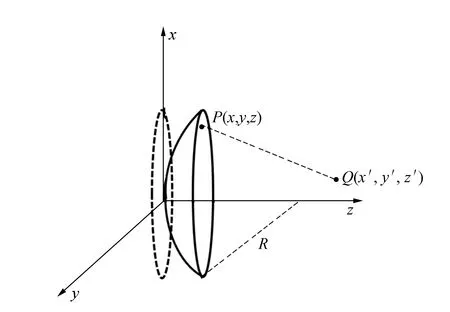
图5 凹球面阵元与聚焦点的位置
(3)
若预设聚焦点坐标为Q(x′,y′,z′),则点声源到聚焦点的距离为
(4)
可得到声波到达聚焦点的时间为
(5)
当选定了基准声源后,则可以计算出其余声源相对于此声源的延时量Δt,从而确定各阵元相对于基准声源的相位差Δφ.
1.4 动态聚焦
根据相控聚焦原理,有规律地调节阵元信号的相位差,使预设的聚焦点按照设定的时间间隔移动到某一位置,实现超声波束的动态聚焦. 在控制聚焦点移动的同时,声场整体也在移动,进而带动波节附近悬浮的微粒移动,从而实现操控声场中悬浮微粒的移动.
通过JTAG(Joint test action group)将PC中的程序下载到FPGA开发板上. FPGA外接SDHC(Secure digital high capacity)作为存储器. 将SD卡与电脑连接,在Matlab软件中利用相控聚焦原理计算在指定某一聚焦点位置时,各阵元与基准声源的相位差. 根据本装置大小设置可悬浮区域为60 mm×60 mm×60 mm.为了保证悬浮微粒移动的平滑顺畅,设置聚焦位置为201×201×201的空间点阵,且相邻2个聚焦点位置间隔为0.3 mm,同时在SD卡中生成包含相位延时参量的bin文件.
FPGA根据摇杆模块输入的信号,通过SPI通信协议,按需求实时读取72组信号的相位延时参量,即可实现各声源相位的实时改变. 超声波相位信号经放大电路(L298N模块)放大后传输至超声换能器输出. 硬件系统各部分连接如图6所示.

图6 硬件系统各部分连接关系
1.5 检测校验
在实际情况中,信号的放大和传输过程会受到各种因素的干扰,最终导致换能器输出的信号与预期设想不符. 因此要通过信号检测,测试出错误信号并且予以纠正. 通过FPGA开发板上自带的CH340G与FPGA串口通信,进行信号检测和校验. 再用示波器检测L298N的输出是否都为40 kHz方波信号. 然后检测所有超声波换能器是否都发出振幅相近的40 kHz超声波. 正常情况下,示波器上将显示稳定的正弦波. 此外,还可以通过示波器测试探头,测试输出相位是否和预设一致,如果出现偏差则调整探头的位置,或者通过调节相位延时信号,实现相控准确聚焦[10].
2 实验操控与结果
2.1 悬浮微粒的选取
根据悬浮原理,悬浮微粒的直径不能超过半个波长,则在有限的半径里,悬浮微粒的密度越低,其悬浮稳定性越好[10]. 并且从图3中可以发现,聚焦点附近声压幅值为0的区域呈现凹球面的形状,所以与圆球形相比,半球形的几何形状更吻合波节的形状. 因此,半球形泡沫小球悬浮效果更为稳定,移动操控时不易掉落. 本文选取直径为3 mm的半球形状聚乙烯小球作为悬浮微粒,并且在实验中验证以上推断.
2.2 操控悬浮微粒移动的准确度
在微粒稳定悬浮的基础上,实现微粒在1维方向上移动,并选取2个方向进行移动轨迹误差分析. 打开电源开关,将微粒放入双凹球面超声阵列装置的中心,使其稳定悬浮,如图7所示.

图7 微粒悬浮图
操纵遥杆,使微粒向下移动,移至边界位置后,再操控微粒向上移动. 使用手机正面拍摄微粒上下往返移动的视频,并且导入编写的轨迹识别程序中,识别出微粒移动的轨迹,如图8中蓝色线所示. 程序已预设微粒移动的轨迹为红色线(x=54),通过对比,可以分析实际轨迹和预设轨迹的误差.
为了更准确地描述微粒移动的准确度,本文计算了均方根误差和相对误差.从图8中可以看出,微粒移动的轨迹近似为直线.粒子在水平方向存在微小抖动,但抖动现象对整体移动的影响很小.计算均方根误差为0.35 pixel,相对误差为0.24%.

图8 微粒上下移动轨迹图
同样操控微粒左右往返移动,同时拍摄视频进行微粒移动的轨迹识别,如图9中蓝色线所示.程序已预设微粒左右移动的轨迹为红色线(y=109).从图9中可看出,微粒移动的轨迹近似直线,计算得到均方根误差为1.18 pixel,相对误差为0.67%.
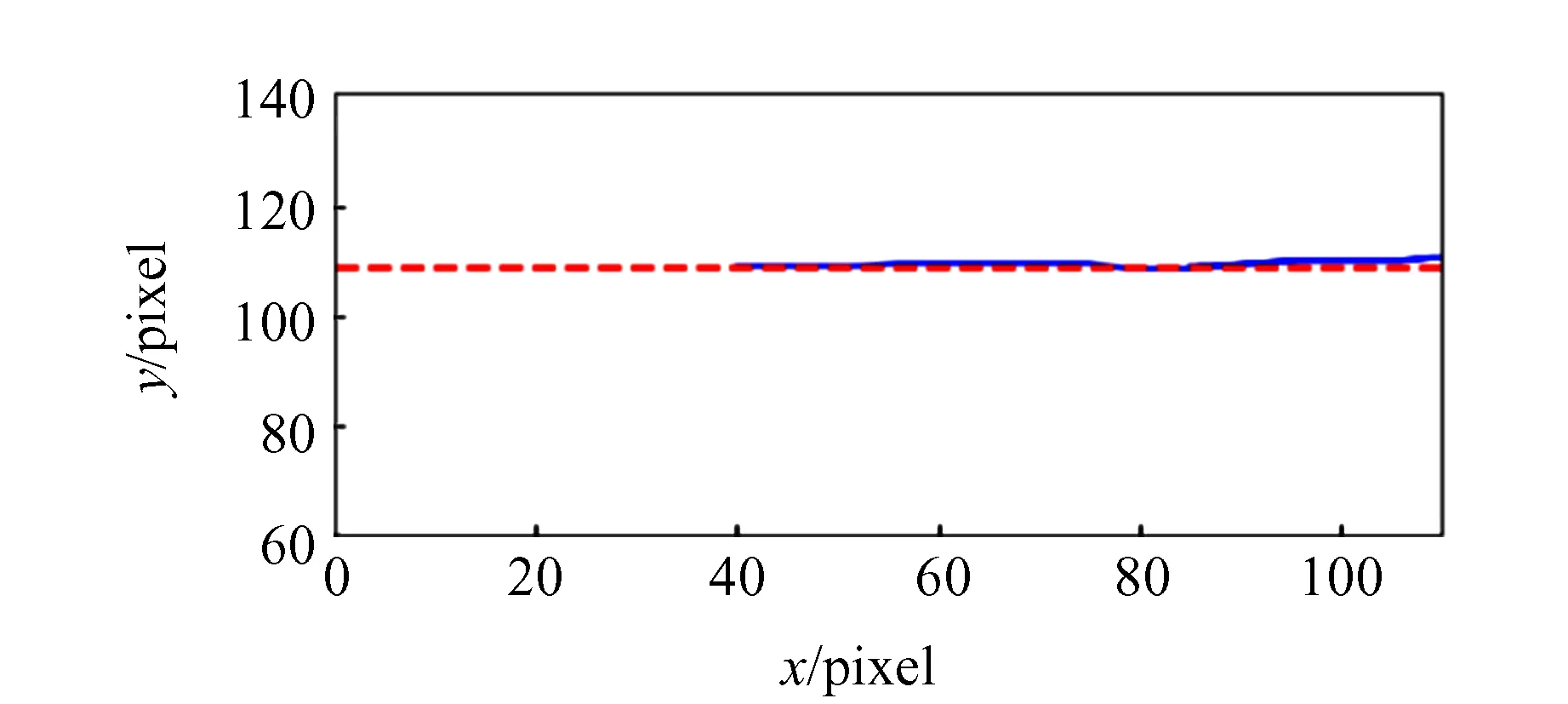
图9 微粒左右移动轨迹图
从以上分析中可看出,粒子实际移动轨迹与理论设定值吻合度较好,操控微粒移动的准确度较高.
2.3 可操控范围
2.3.1 竖直平面
选取竖直平面上构成“S”图形聚焦点的坐标,操纵遥杆,使FPGA按“S”的轨迹移动,且每隔0.029 s读取1次相位,从而使微粒在2维竖直平面内走“S”轨迹. 拍摄视频,通过轨迹识别程序,得到图10. 可以看出实际移动轨迹与预设的“S”轨迹吻合,只存在轻微抖动,实现了悬浮微粒在2维平面内操控移动的效果.

图10 “S”移动轨迹图
2.3.2 水平面
选取水平面上构成方形的聚焦点坐标,操纵遥杆,使FPGA按方形轨迹移动,且每隔0.029 s读取1次相位,使微粒在2维水平面内按方形轨迹运动. 由于观察时2维水平面干扰物过多,难以用程序识别轨迹,因此本文利用手机的流光快门拍摄出实际轨迹图,如图11所示,可以看出实际移动轨迹与预设的方形轨迹吻合.

图11 方形移动轨迹图
综上所述,本文设计的凹球面双发射极超声悬浮装置实现了悬浮微粒在3维空间中移动,可操控微粒移动的范围广.
3 结束语
本文设计的装置可以使微粒稳定悬浮,大范围操控移动,而且移动准确度高. 若将该装置融入中学或大学物理教学中,为声悬浮理论的研究及实验探究提供实验平台,不仅能激发学生学习的兴趣,通过动手实践来加深学生对声学理论的理解,还能培养学生的创新精神,使学生基于此条件探索出更多关于声场内固体或者液体移动运输的应用.
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
数学年刊A辑(中文版)(2021年1期)2021-06-09
四川师范大学学报(自然科学版)(2020年1期)2020-07-05
海洋信息技术与应用(2020年1期)2020-06-11
铁道通信信号(2020年12期)2020-03-29
电子制作(2019年23期)2019-02-23
家庭影院技术(2018年11期)2019-01-21
噪声与振动控制(2016年5期)2016-11-09
西部广播电视(2015年9期)2016-01-18
