
基于改进细菌觅食算法的光伏阵列MPPT研究
2021-07-06 16:44陈育虎
电源技术 2021年6期
陈育虎,侯 涛
(兰州交通大学自动化与电气工程学院,甘肃兰州 730070)
新能源发电成为近年研究的热点。其中太阳能具有清洁和丰富的特点,成为了前景最好的清洁能源[1]。太阳能发电功率同时也存在着非线性,时变不确定性等缺点。在不同环境条件下,光伏电池的输出功率具有较大差别[2]。为了解决太阳能利用率和发电质量问题,最大功率点跟踪是当前工程中的重要选择之一[3]。
MPPT 的本质就是动态寻优的过程,电池内阻与负载阻抗相匹配即可达到最大功率点[4],文献[5-7]介绍了MPPT 算法,主要包括电导增量法,扰动观察法,恒定电压法。MPPT算法在跟踪最大功率点时收敛速度和收敛精度不够,因此许多学者提出了相应的改进方法,如变步长扰动观察法,也有将智能算法应用到MPPT 中,其收敛速度和收敛精度有所提高。吴海涛等[8]提出的粒子群扰动观察法,在MPPT 中精度和速度上有一定的改进。王志豪等[9]根据RBF 神经网络的强非线性拟合特性和快速收敛性,通过RBF 神经网络调节Boost 电路的占空比,改进了跟踪速度。聂晓华等[10]提出了改进猫群算法,提高了收敛精度,解决了跟踪时的早熟问题,动态过程平稳性有一定的提高。巩瑞春等[11]首次将细菌觅食算法应用到MPPT 中,验证了细菌觅食算法在MPPT 中的可行性。李乾坤等[12]提出在细菌觅食算法复制操作中,根据细菌当前适应度值的优劣进行复制,在一定程度上提高了收敛速度。马溪原等[13]对细菌觅食算法趋化步长进行改进,使得各个细菌在不同维度前进不同的步长,提高了收敛速度和精度。本文在现有研究的基础上,采用智能探寻游动细菌觅食算法来保证收敛精度,进一步提高收敛速度和动态过程平稳性,进而提高光伏发电系统的利用率。
1 光伏电池数学模型和等效电路
光伏电池是将太阳能转化为电能的直接发电装置[9]。光伏电池等效电路如图1 所示。
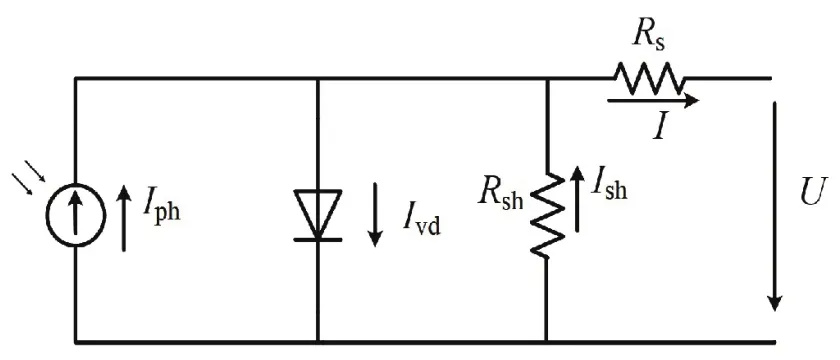
图1 光伏电池等效电路
文献[14]介绍了光伏等效电路,可得光伏电路等效方程如下:
式中:Iph为光电效应产生的电流;Ivd为二极管流过的电流;Ush为并联电阻上电压;U为光伏电池输出电压;I为光伏电池输出电流;Ie为二极管反向饱和电流;n为二极管的品质因子;k为玻尔兹曼常数;T为光伏组件的绝对温度。
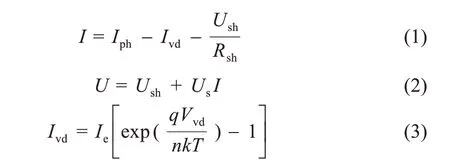
本文应用文献[15]中的工程模型,可得光伏电池输出电流:

实际电路中Rsh很大,Rs很小,则光伏电池输出功率:
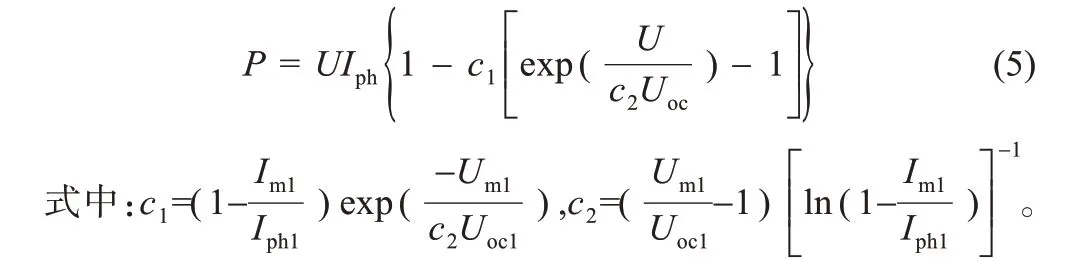
其中,Im1、Um1、Iph1和Uoc1为任一条件下最大功率点电流、电压、短路电流和开路电压。
式中:α、β和γ分别为0.002 5 ∕℃,0.05 和0.002 88 ∕℃;Im、Um为标准情况下最大功率点电流和电压;Iph和Uoc为当前条件下最大功率点电流和电压。
2 光伏电池输出特性曲线
温度和光照强度可影响光伏电池的输出特性。
在温度恒定为25 ℃时,光照强度分别是800、900、1 000和1 100 W/m2,光伏电池输出特性曲线如图2 所示。由图2 可知,温度为25 ℃时,光伏电池最大功率点随光照强度增加而提高。

图2 温度为25 ℃光伏电池输出特性曲线
光照强度恒定为1 000 W/m2时,温度分别是5、15、25 和35 ℃,光伏电池输出特性曲线如图3 所示。由图3 可知,光照强度为1 000 W/m2时,光伏电池最大功率点随温度增加而降低。
一体化控制装置在中小型灌排泵站中的应用………………………………… 史湘琨,宋成法,李端明(12.40)

图3 光照强度为1 000 W/m2光伏电池输出特性曲线
3 细菌觅食算法及其改进
(1)细菌觅食算法
细菌觅食算法(bacterial foraging optimization algorithm,BFOA)是一种新型群体全局寻优算法,该算法具有易跳出局部最优解和并行搜索等特点。细菌觅食主要依靠三个过程寻求最优化解:趋化、复制和迁移。设细菌种群的大小是S,细菌所在位置就是问题的一个候选解,细菌x用B维向量表示,x为1,2,…,S。θx(a,b,c)表示细菌x第a次趋化、第b次复制和第c次迁移之后的位置。在细菌觅食算法中,搜索空间中细菌的位置对应着优化问题的解,优化函数的适应度值即目标函数值代表解的优良程度。Ned、Nre、Nc表示迁移、复制、趋向性操作最大次数[16]。
趋化:细菌向富养区域聚集的行为。当环境差时,细菌频繁地进行旋转,指向一个新的方向,并移动单位步长,旋转后若适应度值得到改善,一直沿着这个方向移动,直到适应度值不再改善,称之为游动。当环境好时,较多的细菌直接进行游动。应用在最大功率跟踪中,运动方向只能是二维空间,电压不降则增。
复制:生物进化过程中,觅食能力弱的会被淘汰,能力强的会进行繁殖,将该现象称为复制现象。复制操作在保证种群大小不变的情况下,一半生存能力强的细菌复制,另一半生存能力弱的细菌淘汰。
迁移:当细菌生活的局部区域突然发生变化时,经过迁移就会使生活在这个局部区域的部分细菌迁移到另外一个局部区域。迁移操作使得细菌觅食具有随机搜索的能力,保持种群的多样性,使搜索过程跳出局部最优解达到全局最优,最大功率跟踪要求收敛快速,所以迁移概率不宜过高。
(2)细菌觅食算法的改进
本文采用智能探寻游动方法,该方法给予细菌智能探索功能,提前探测下一位置的适应度值大小,若是优于当前时刻,则继续游动,反之,则停止游动。这样就可以避免游动到差环境下,大大加快了算法的速度。改进游动方法如图4所示。
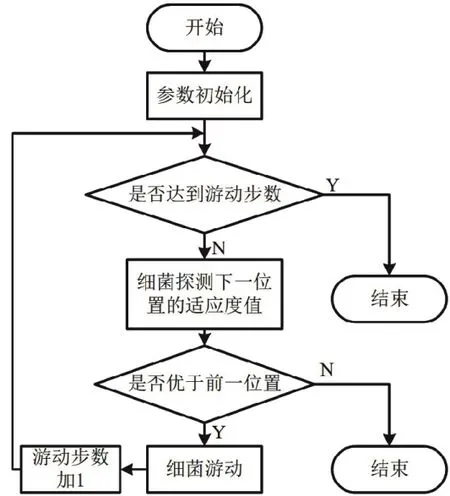
图4 智能探寻游动流程图
(3)改进的细菌觅食算法在MPPT 中的应用
最大功率跟踪装置对光伏阵列输出电压、电流进行实时检测,通过调节Boost 升压斩波电路的占空比,从而改变输出电压,达到光伏阵列输出功率最大的目的。
记录当前功率值作为初始功率,在MPPT 中,用改进的方法进行游动,提前探索下一时刻的功率值,若是下一时刻功率值大于当前时刻功率值,就让该细菌向前游动一步,更新当前的占空比和功率值,若是小于当前功率值就停止游动,占空比和功率值不更新,保持现在的占空比和功率值。流程图如图5 所示。
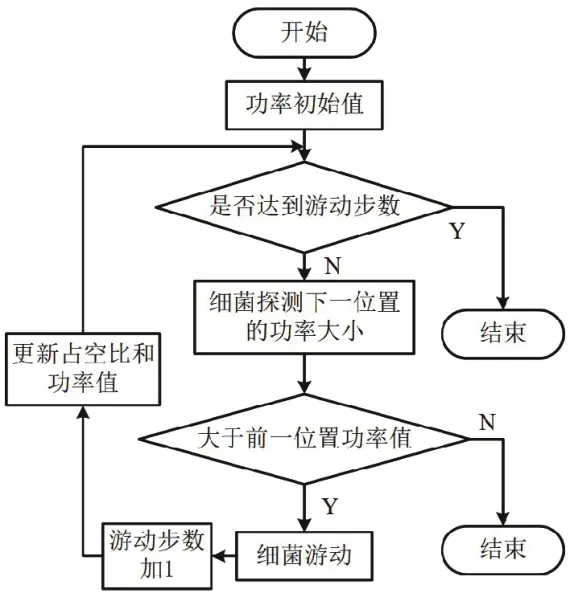
图5 MPPT中智能探寻游动流程图
然后再对功率细菌种群进行重新排序,再进行复制操作,使功率保持在最大功率点。
4 仿真及结果分析
4.1 光照强度和温度不变时的仿真分析
在MATLAB 中分别建立了基于智能探寻游动细菌觅食算法和基于细菌觅食算法的光伏发电系统MPPT 仿真模型。
仿真参数如下:太阳能单晶硅光伏组件短路电流Isc是5.62 A,开路电压Voc是45.2 V,最大功率点电压Vm是36.6 V,最大功率点电流Im是5.4 A。七块组件串联,四串组件并联,组成一个光伏阵列,在太阳光照强度为1 000 W/m2,温度为25 ℃时,分别使用本文中采用的智能探寻游动细菌觅食算法和现有细菌觅食算法进行仿真,输出功率对比结果如图6所示。

图6 光照强度为1 000 W/m2,温度为25 ℃时输出功率对比曲线
从图中可以看出,给予细菌智能探索游动功能的细菌觅食算法比现有细菌觅食算法收敛性更快,智能探寻游动细菌觅食算法在0.025 s 处追踪到最大功率点,现有细菌觅食算法在0.05 s 处追踪到最大功率点。对比运行过程的功率振荡、电压振荡和电流振荡,可以看出,本文采用的智能探寻游动细菌觅食算法和现有细菌觅食算法相比,在保证收敛精度的同时,较大幅度地提高了光伏电池阵列在跟踪最大功率点的收敛速度和动态过程的平稳性。
经过计算,目标最大功率为5 533.92 W,将两种BFOA 与目标功率相比可得功率误差如图7 所示。
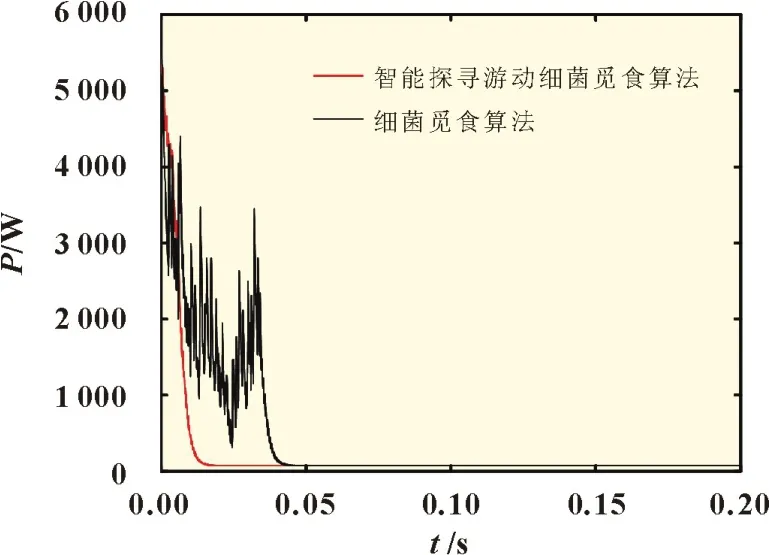
图7 光照强度为1 000 W/m2,温度为25 ℃时功率误差对比图
智能探寻游动BFOA 在0.02 s 处功率跟踪趋于稳定,但还是存在一定的误差70 W。BFOA 在跟踪太阳最大功率点时,在0.045 s 之前,一直属于动态跟踪阶段,误差较大,平稳性差,跟踪速度慢,在0.045 s 后趋于稳定,但还是存在误差70 W。由此可得在光照强度不变,温度不变的情况下,智能探寻游动BFOA 的跟踪速度和动态过程的平稳性明显优于BFOA。
4.2 光照强度变化时的仿真分析
在0.1 s时温度不变,将光照强度1 000 W/m2变为900 W/m2,图8 为本文采用的智能探寻游动细菌觅食与现有细菌觅食算法的功率对比曲线。

图8 改变光照强度跟踪效果功率对比图
从图8 中可以看出,在0.1 s 处将光照强度1 000 W/m2变为900 W/m2时,本文采用的智能探寻游动细菌觅食算法在0.11 s 处跟踪到最大功率点,现有细菌觅食算法0.13 s 处跟踪到最大功率点。可见,本文采用的智能探寻游动细菌觅食算法具有很快的收敛速度,能够更快地追踪到最大功率点,而且动态过程的平稳性更好。
经过计算,0~0.1 s 之前目标最大功率为5 533.92 W,0.1~0.2 s 目标最大功率为5 031.02 W,将改进前后BFOA 的MPPT输出功率与目标功率相比可得功率误差如图9 所示。

图9 改变光照强度功率误差对比图
在0.1 s 将光照强度1 000 W/m2变为900 W/m2,智能探寻游动BFOA 在0.1~0.12 s 处于跟踪状态,在0.12 s 之后趋于稳定,误差为44 W。BFOA 在光照强度变化时在0.1~0.13 s 之间一直处于动态跟踪状态,功率波动大,误差大,平稳性差,跟踪速度慢。在0.13 s 处跟踪到稳定状态,误差为44 W。由此可得,在0.1 s 处将光照强度1 000 W/m2变为900 W/m2时,智能探寻游动BFOA 比BFOA 在跟踪速度和动态过程的平稳性方面有明显的改善。
5 结论
本文基于光伏电池数学模型分析了光伏电池输出特性。利用智能探寻游动细菌觅食算法,调节Boost 电路的占空比,更新功率值,实现负载侧和电源测相互匹配,实现MPPT,改进的细菌觅食算法与现有细菌觅食算法相比在保证收敛精度的同时,较大幅度地提高了光伏电池阵列在跟踪最大功率点的收敛速度和动态过程的平稳性,改善了光伏发电的利用率。
猜你喜欢
哈尔滨轴承(2021年1期)2021-07-21
数学物理学报(2021年3期)2021-07-19
小学科学(2020年11期)2020-03-04
工程与建设(2019年5期)2020-01-19
厦门理工学院学报(2016年1期)2016-12-01
电测与仪表(2016年24期)2016-04-12
中国光学(2015年5期)2015-12-09
湘潭大学学报(哲学社会科学版)(2015年5期)2015-11-25
电测与仪表(2015年20期)2015-04-09
天津诗人(2014年4期)2014-11-14
