对流层映射函数对区域CORS网解算精度对比分析
2021-07-05 09:38周康颖从建锋孔晓宇
地理空间信息 2021年6期
周康颖,从建锋,孔晓宇
(1.山东科技大学 测绘科学与工程学院,山东 青岛 266590)
GPS卫星讯号在通过中性大气层时会出现延迟现象,由于对流层大气成分受地面冷热的影响,其自身的高度和厚度会时刻发生变化,导致80%的信号延迟发生在对流层,尤其是对流层水汽的变化对卫星信号的影响最为敏感。虽然大气中水汽的成分非常低,但其产生的延迟作用却能达到对流层全部延迟的十分之一以上[1-2]。电离层引起的传播误差可由不同频率的相位组合消除,而对流层由于成分复杂,其误差无法完全消除,目前多采用建立大气模型的方法来进行延迟改正[3]。但是要得到不同路径上的大气延迟,还需要映射函数模型,映射函数可以把天顶方向的对流层延迟投影到任意方向上,从而求得斜路径上的大气延迟,映射函数的选择对于计算大气延迟是非常重要的[4]。因此,不同区域选择最优的映射函数模型可以改善该区域对流层延迟,提高GNSS定位的精度。
近些年来,各国相关专家开展了关于映射函数在GPS数据处理中影响方面的研究。Boehm等[5]分别对3种映射函数进行对比分析,证明了使用VMF1映射函数比NMF和GMF映射函数的精度在水平方向上高出3%,在高程方向高出7%。徐杰[6]对混合观测网GPS数据进行不同映射函数对比分析,结果表明在亚洲地区GMF映射函数表现更佳。李斐等[7]搜集并处理了南极周边IGS站的数据,并同时与对流层映射函数相比较,分析结果表明GMF和VMF1映射函数在N、E、U 3个方向的误差都要小于NMF映射函数,VMF1模型的实验结果要略好于GMF映射函数模型。蒋光伟等[8]利用香港CORS 数据进行分析,认为基于VMF1 映射函数对香港CORS网解算精度最佳。上述表明,映射函数的类别与地区的差异都会产生不同的结果,所以参考山东省连续运行参考站(SDCORS)的观测数据,分析对流层映射函数对SDCORS网解算精度的影响。
1 对流层映射函数模型
1.1 NMF函数模型
Niell认为地表参数会限制对流层延迟模型的精度,提出基于时间周期性变化大气层分布的NMF映射函数,并提出基于时间周期性变化大气层分布的NMF映射函数模型,其静力学延迟映射函数包括了与测站地理高程有关的改正,反映了大气密度与高度呈现负相关的特性,即海拔高度越低,大气密度会更高。NMF模型是GAMIT、Bernese等高精度GNSS数据处理软件常用的模型之一,式(1)为天顶静力学延迟映射函数:
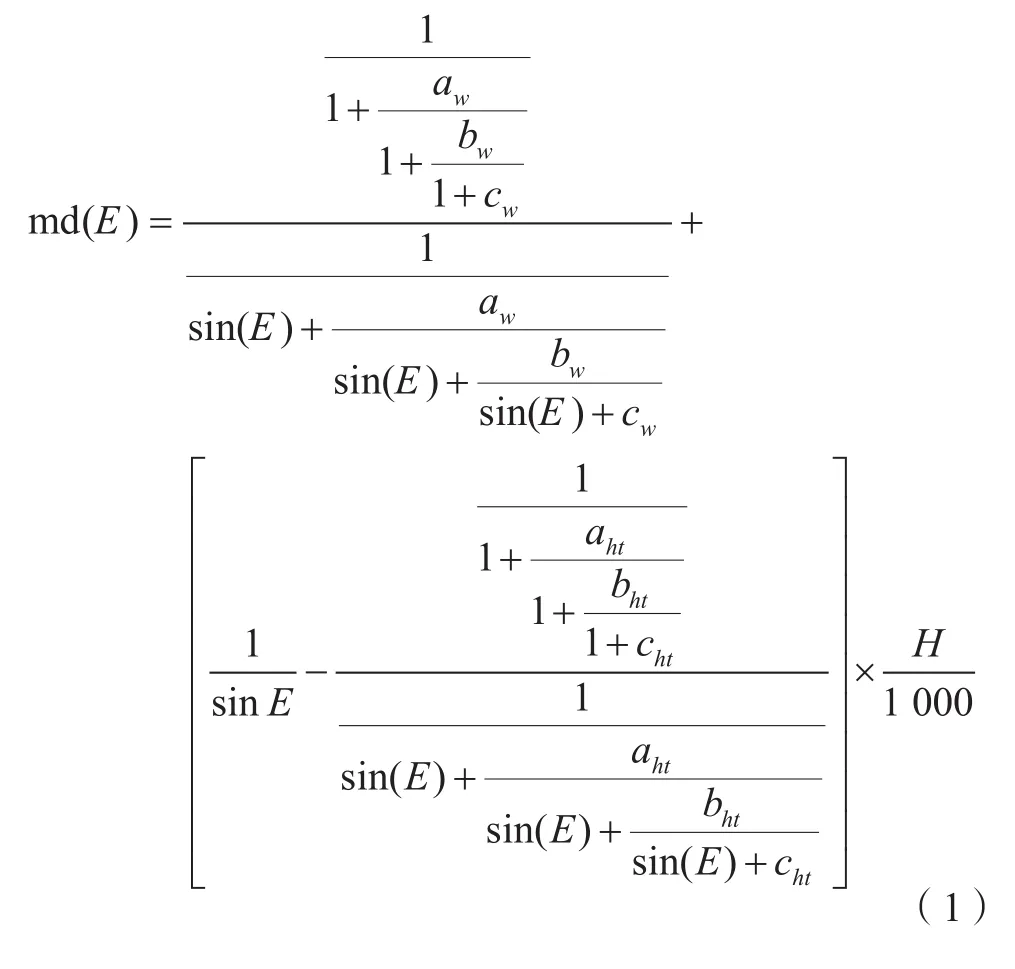
式中,E是截止高度角;aht=2.53×10-3,bht=5.49×10-3,cht=1.14×10-3;H是正高。在纬度为15°~75°时,系数ad、bd、cd可由式(2)内插求得:
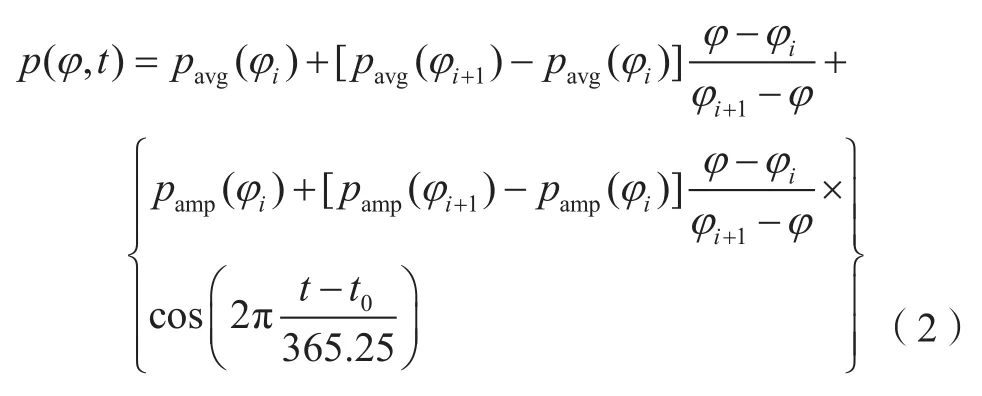
式中,p表示要内插的系数ad、bd、cd;t为年积日;t0=28为参考时刻的年积日;纬度φ1和φi+1时的系数的平均值pavg和波动的幅度pamp值见表1所示。
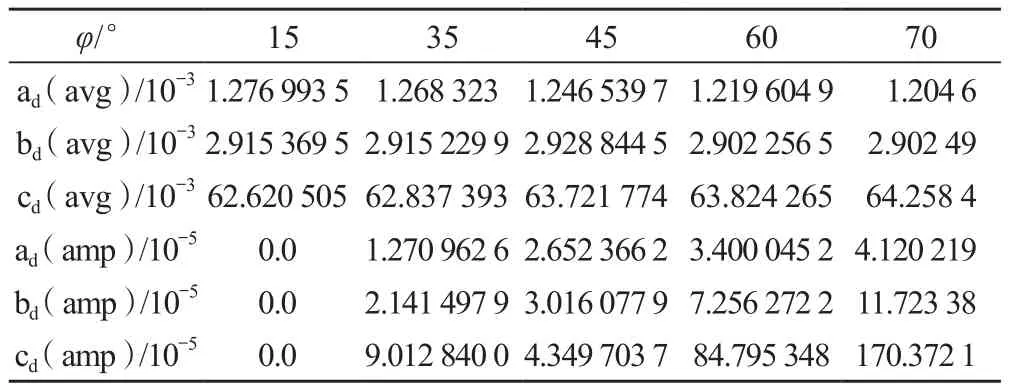
表1 干分量投影函数系数
当测站纬度小于15°时,系数ad、bd、cd可由式(3)计算而得:

当测站纬度大于75°时,系数ad、bd、cd可由下式(4)计算而得:

NMF模型中湿延迟映射函数为:
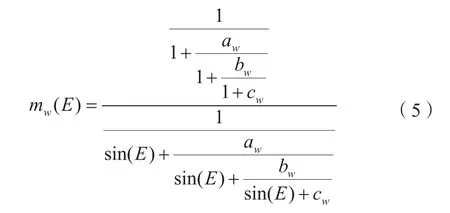
当纬度在 15°~75°时,系数ad、bd、cd可由式(6)内插求得:

各系数见表2所示。
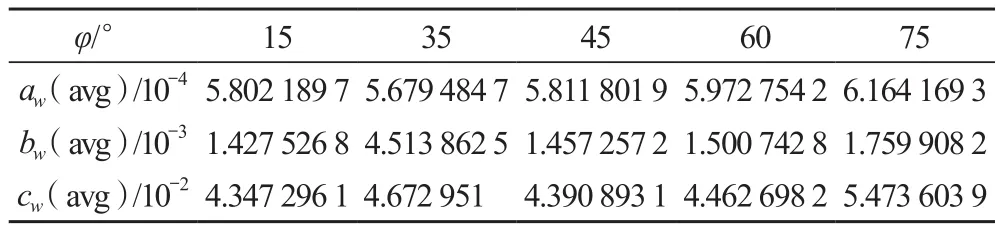
表2 湿分量投影函数系数
当测站纬度小于15°时,系数ad、bd、cd取15°时的值;当测站纬度大于75°时,系数ad、bd、cd取75°时的值。
1.2 VMF1函数模型
VMF模型的建立是由Boehm和Schuh通过数值天气得到映射函数而成。VNM模型和NMF模型的数学结构基本无异,VMF1模型是更进步的VMF模型,各方面改良后的映射函数模型。它是利用射线跟踪法得到空间分辨率为2°×2.5°的全球任意格网区域,时间分辨率为6 h。而且VMF1的网站向读者提供了包括算法和格网数据在内的各种资料(http://ggosatm.hg.tuwien.ac.at/DELAY/)。VMF1在精度和可靠性方面是当前被所有人认可的最好的对流层映射函数,另一方面,因为该函数是根据实测气象数据得到,所以会产生大致34 h的时间延迟,实时性较差。为了解决VMF1实时性较差的问题,Boehm为用户提供了预报的VMF1模型VMF1-FC,方便能够达到实时使用的效果。
1.3 GMF函数模型
由于VMF1模型的使用不便,Boehm再次提出了一个“折衷”的解决办法,即GMF函数模型。借鉴NMF的方法,将年积日、经度、纬度、高程作为输入参数,通过内插得到对流层投影函数的系数。GMF模型在保留了NMF模型优点的同时提高了精度,解决了VMF1 的实时性不佳问题并与其达成了很好的契合,共同发挥作用。
2 数据来源及实验流程
此次选取了山东省内52个观测站的连续观测数据,站点分布如图1所示。提取了采样间隔为30 s的CORS站观测数据,精密星历及钟差产品均使用IGS发布事后精密星历及钟差产品。
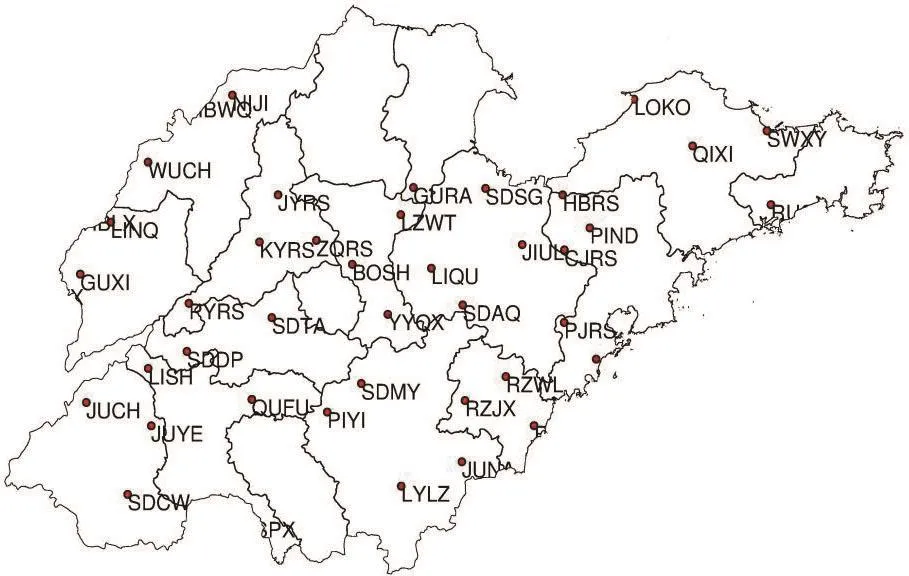
图1 站点分布图
为了比较对流层映射函数对SDCORS网解算精度的影响,在解算时引入IGS(BJFS站、SHAO站)作为固定站,将52个CORS站设置为非固定站。对CORS观测数据预处理过程使用各国都认同的GNSS数据预处理软件TEQC,把得到的初始数据进行数据格式标准化处理,并做质量检核分析,同时去掉观测结果较差的O文件。基线解算采纳GAMIT软件,解算类别为松弛解,电离层选择为无电离层线性组合模式,对流层折射采用Saastamoinen模型,此次实验示意图如图2所示。
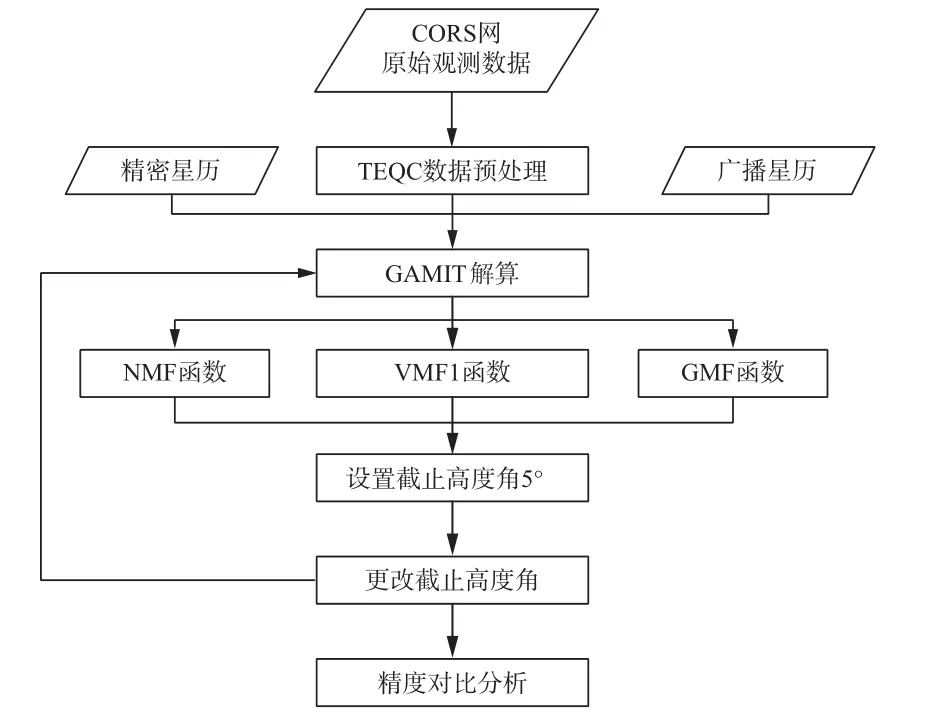
图2 实验流程图
3 结果分析
标准化均方根误差(NRMS)是用来表指出基线解算结果中基线值背离加权平均值的大小,通常情况下,NRMS值的大小与基线解算精度的高低为负相关,即值越大,精度越低,值越小,精度越高。一般情况下NRMS小于0.3,若大于0.3则认为基线解算失败,其原因可能是周跳未修复或起算坐标有误等原因,需重新解算,基线解算结果如图3所示。

图3 GAMIT基线解算NRMS值
由图3可知,不同截止高度角下NMF、VMF1、GMF 3种映射函数模型基线解算NRMS值均小于0.3,表示基线解算结果都合格。对比3种模型发现,同一截止高度角下,NRMS值相差不大,随着截止高度角的增加,基线解算的NRMS值减小,说明引入了较好的观测数据。三种映射函数模型N、E、U方向基线误差结果如图4所示。
图4说明了NMF、VMF1、GMF 3种映射函数模型在截止高度角5°和10°时N、E、U方向基线误差非常相近, N方向基线误差优于3 mm,E方向基线误差优于5 mm,U方向基线误差优于10 mm,伴随着逐渐变大的截止高度角,N、E、U方向基线误差也随之在慢慢变大。通过分析卫星位置分布,对流层的变化及水汽的不良影响,在SDCORS网中的基线解算中截止高度角设立为10°时最佳。
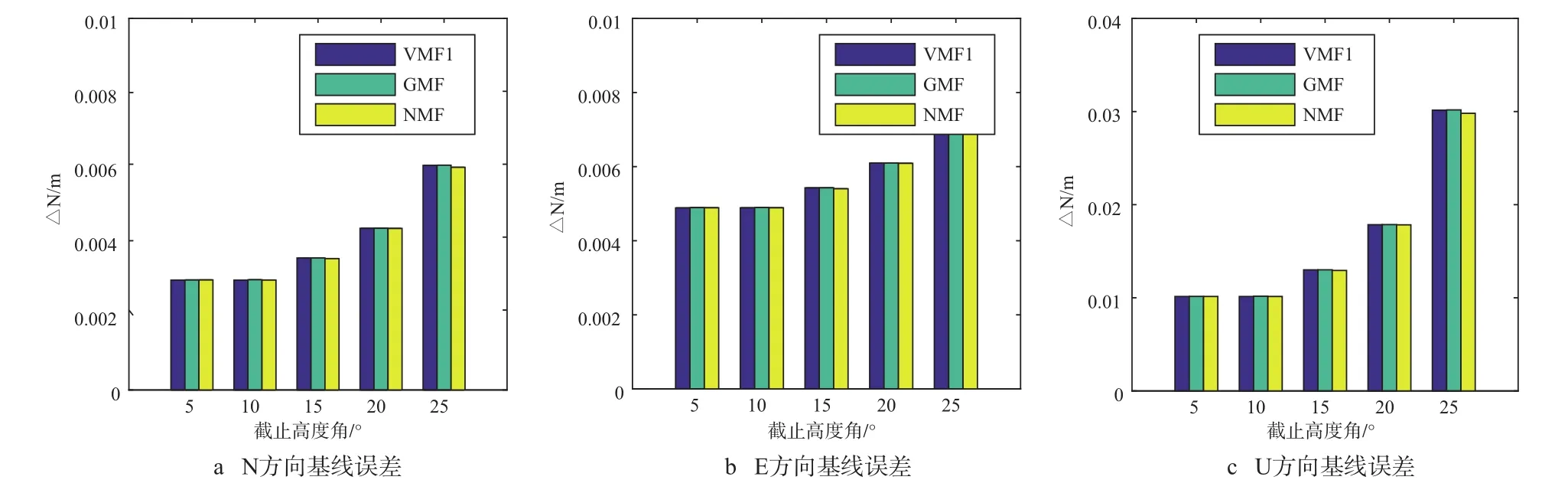
图4 三种映射函数模型在N、E、U方向基线误差
4 结 语
本文借助52个山东CORS站和2个IGS站一个月的数据,进行整理、解算与分析,并联系不同映射函数对山东CORS网解算得到的不同精度得出以下结论:
1)NMF、VMF1、GMF映射函数模型的解算精度均低于0.3,且随着截止到度角的逐步变大,NRMS值的在逐渐降低,在5°~25°的变化过程中,解算精度在逐步的增加。
2)NMF、VMF1、GMF映射函数模型在N方向上的基线误差均优于N、U方向上的基线误差,U方向上基线误差最大。在截止高度角为10°时,N方向基线误差优于3 mm,E方向基线误差优于5 mm,U方向基线误差优于10 mm。
3)在截至高度角为5°和10°时,3种映射函数模型对区域CORS网解算精度相当, 随着截至高度角的增加,3种映射函数模型在N、E、U方向上误差逐渐增大。通过分析卫星位置分布,对流层的变化及对水汽非常敏感的不良影响,在SDCORS网中的基线解算中截止高度角设立为10°时最佳。
4)NMF、VMF1、GMF 3种映射函数模型对SDCORS网解算精度相当,考虑到VFM1模型在解算过程中需要引入模型文件和GMF模型的全球优越性,推荐GMF函数模型对SDCORS网进行解算。
猜你喜欢
区域治理(2021年14期)2021-08-11
科学(2020年5期)2020-11-26
中国惯性技术学报(2019年3期)2019-10-15
齐鲁周刊(2017年29期)2017-08-08
舰船电子对抗(2016年5期)2016-12-13
载人航天(2016年4期)2016-12-01
成都信息工程大学学报(2016年6期)2016-06-01
沙漠与绿洲气象(2014年1期)2014-03-20
航天器工程(2014年5期)2014-03-11
测绘学报(2014年2期)2014-01-11