一种轻卡前向毫米波雷达售后标定方法
2021-07-05 05:32:54苌乐
汽车电器 2021年6期
苌 乐
(江铃汽车股份有限公司,江西 南昌 330001)
轻卡的高级辅助驾驶系统ADAS[1](高级驾驶辅助系统,Advanced Driving Assistance Systems)传感器方案通常采用前视摄像头FAS-Cam(Forward View Camera)和前向毫米波雷达MRR(Millimeter Wave Radar)的融合方案,该方案可以实现的ADAS功能包括自适应巡航ACC、前向碰撞预警FCW[2]、自动紧急制动AEB[3]、车道保持辅助LKA[4]等。雷达和摄像头传感器因安装差异及车辆个体差异等原因,雷达和摄像头安装角度会存在误差。为了更准确地实现ADAS功能,系统需要校正前向毫米波雷达和前视摄像头安装角度误差的准确数值,因此需要在车辆生产下线或售后换件时,对传感器的安装角度偏差进行计算,再对偏差进行补偿,这个过程也被称为校准。经过校准,ADAS功能才可以正常启用。传感器的标定分为下线标定和售后标定,本文将着重介绍一种车载前向毫米波雷达售后校准方法。
1 雷达售后标定前的要求
前向毫米波雷达的标定目的是补偿雷达天线的电轴偏离角度,包括水平偏离角度、垂直偏离角度和电轴与车辆行驶方向的偏离角。标定结果受制于整车装配工艺的误差累积,如果雷达的安装误差超出允许的误差范围,需要重新调整雷达支架,确保雷达天线的偏离角度在误差范围内,再进行标定。
1.1 雷达安装规范
雷达通常安装在车辆的前保险杠、栅栏、或前防撞梁处,建议开放式安装,不带罩盖。雷达安装高度范围400~700mm,Y向应在车身中轴面上,如果需要偏置,偏置距离应≤400mm,雷达电轴轴线应与车辆行驶方向保持一致(表1),航向yaw为0,偏差范围Δyaw≤4°;俯仰角偏差pitch为0,偏差Δpitch≤3°;翻滚角为0,偏差roll≤3°。雷达安装好之后,需要保证雷达的波束辐射范围(锥筒范围内)无任何金属部件,雷达周边50mm方框内不能有干涉部件。

表1 雷达安装及校准误差范围
1.2 雷达售后标定场地布置
雷达售后标定对标定场地的布置要求如下。
1)金属角反与雷达表面的距离2.5m。
2)雷达校准的净空区:金属角反与雷达前表面之间的区域(2.5m)与金属角反后方0.5m的区域为净空区,净空区内不能有任何金属反射物或障碍物。
3)雷达垂直方向净空角度为±20°或净空高度3.0 m。
4)雷达水平方向净空角度为±45°或1.5倍车宽。
1.3 金属角反的规格及布置要求
1)金属角反材料:铝、铁、不锈钢。
2)金属角反(图1)为3块等腰直角三角形组成。
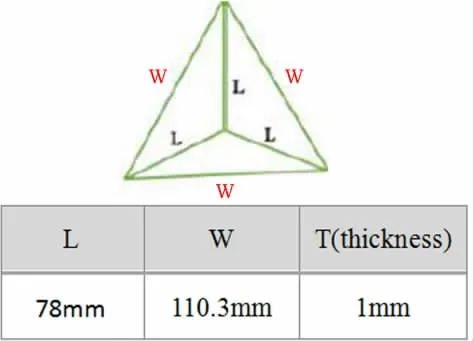
图1 金属角反规格
3)角反的边长制作误差在2mm以内。
4)金属角反中心相对雷达中心水平左右安装误差≤±5.0mm。
5)金属角反中心相对雷达中心垂直上下安装误差≤±5.0mm。
6)固定金属角反后,金属角反之法线须与车身行驶轴线平行,误差不能超过±1°。
1.4 标定的车辆要求
校准对于车辆的要求如下:确保胎压正常;已完成四轮定位。
2 标定治具的调整
通过A治具角车牌定位组和B治具角反定位组对角反位置和角度进行调整,方可进行雷达标定。
2.1 A治具车牌定位组组装
将A治具车牌定位组(包括车牌支架和点线雷射仪支架)组装起来,如图2所示,红色圆圈圈起来部分需要用螺丝锁固定,再将点线雷射仪放进1号位置。
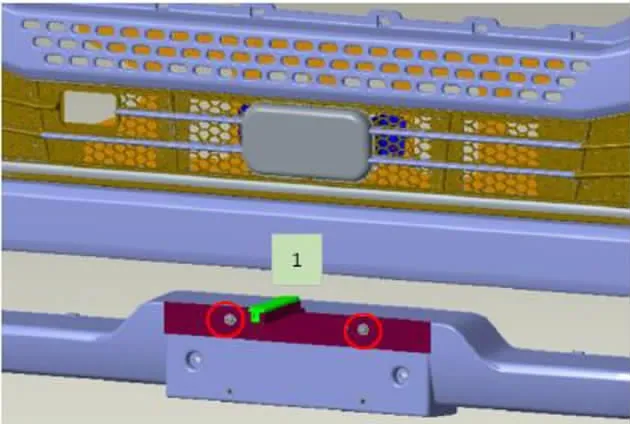
图2 A治具车牌定位组装装置
2.2 B治具角反定位组
将B治具角反定位组使用六角扳手组装起来,如图3所示。角反上下可调范围400~800mm,左右可调范围±400mm。

图3 B治具角反定位组组装装置
2.3 B治具角反距离与高度调整
两套治具组装好之后,下一步需要调节B治具角反的居中布置,如图4、图5所示,调整金属角反与雷达同高,角反前表面与雷达天线表面沿车身纵向方向距离2.5m。开启A治具和B治具上的雷射笔,使两个治具上的雷射笔在Y方向上正对,确保B治具角反中心位于车身中轴面。

图4 雷达居中布置时的B治具角反的调整
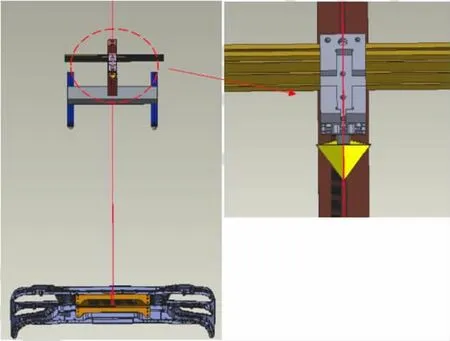
图5 点线雷射笔开启示意图
2.4 B治具角反与车轴线垂直调整
如图6所示,将B治具2号位置点线雷射笔2开启,并向左移动雷射笔平台移动225mm(B治具长度的一半),旋转B治具,使2号位置点线雷射与A治具左边框准确对位,如图7所示,固定旋转螺丝,此动作完成后角反前平面与车轴线垂直,如图8所示。

图6 移动雷射笔2左偏中心225mm

图7 2号位置雷射2对准治具A边缘

图8 B治具角反平移使角反雷达的轴线与车辆轴线保持一致
2.5 B治具角反左右平移调整
如图8所示,左右移动角反,使角反中心正对雷达中心。再确认B治具水平仪水平后,将螺丝锁紧,确保角反的轴线对准雷达的轴线并与车身轴线平行或重合。
3 雷达售后标定流程
3.1 雷达售后标定流程
雷达标定前需要写入雷达布置的位置参数、车型参数,该过程称为Coding,如图9所示。按照B治具摆放到图8所示的位置方可进行雷达标定。如图10所示,点击配置按钮,此时雷达会接收金属角反的信号,并测量雷达轴线与车身行驶方向轴线的水平角度和垂直角度偏差,并对偏差进行补偿校准,完成雷达的售后标定。

图9 雷达及摄像头布置参数写入界面

图10 雷达售后标定界面
如果雷达轴线与车身行驶方向轴线偏差超出误差范围,则需要重新调整雷达支架,再进行雷达的售后标定。雷达售后标定流程如表2所示。
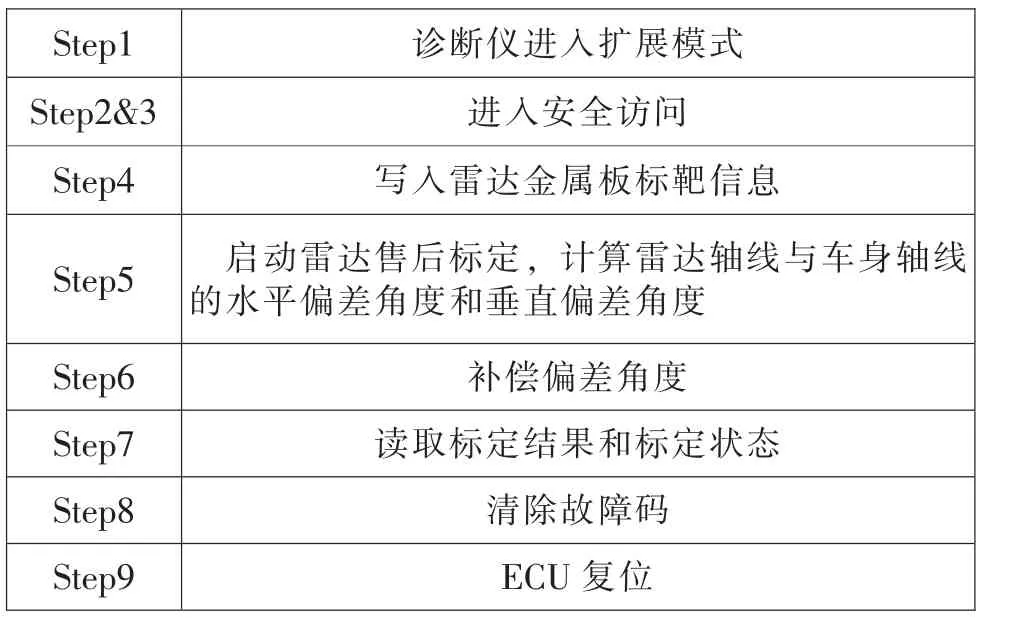
表2 雷达售后标定流程
3.2 雷达校准的失败原因
如有以下情况,可能导致雷达校准失效:金属角反没有布置在正确的位置;雷达安装角度偏差超出规定的范围;有其它电磁波信号的干扰。
4 结束语
本文介绍了轻卡前向毫米波雷达的售后标定对雷达及车辆场地要求,详细介绍了标定治具的摆放过程,最后介绍了雷达的标定流程及失败原因。按照标定程序进行标定,一定可以成功地对雷达进行标定。
猜你喜欢
汽车工艺师(2021年7期)2021-07-30 08:03:40
装备制造技术(2020年11期)2021-01-26 00:39:14
汽车维修与保养(2020年11期)2020-06-09 05:42:16
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
水利科技与经济(2017年10期)2017-04-25 00:21:00
光学精密工程(2016年3期)2016-11-07 09:03:34
汽车维修与保养(2016年12期)2016-03-14 06:37:09
少儿美术·书法版(2016年12期)2016-02-06 01:00:54
汽车维修与保养(2015年1期)2015-04-17 03:25:26
汽车维修与保养(2015年7期)2015-04-17 02:12:31