面向无人机路径规划的多目标粒子群优化算法
2021-07-03 05:45:28苏子美董红斌
应用科技 2021年3期
苏子美,董红斌
哈尔滨工程大学 计算机科学与技术学院,黑龙江 哈尔滨 150001
无人机路径规划的应用领域正变得越来越广。在军事领域方面无人机可以在战场物资投放、作战资源调度等方面使用[1−5],无人机参与作战可大量减少战争伤亡,大大提高作战效率与成功率。在民用方面使用无人机进行快递配送、救灾物资投放和喷洒田地[6]也成为新的目标,因此在此方面所应用的技术具有巨大的市场潜力。
无人机在以上方面应用所产生的问题都可以归结为无人机路径规划问题,这类问题是一个NP难问题(NP-hard problem),目前使用进化算法可以在这类问题上得到很好的解决[7−8]。文献[2]针对该问题提出了两阶段策略,使用贪心算法与遗传算法作为一、二阶段进行优化;文献[5]使用了单目标进化算法应用于无人机追捕罪犯;文献[9]使用极端拥挤的NSGA-II(EC-NSGA-II)作为第一阶段,求得近似Pareto前沿的极端解作为多目标遗传算法的初始粒子;文献[10]将MOEA/D(基于分解的多目标优化)引入粒子群优化算法中以更好地平衡多个目标函数解;文献[11]将基于集的粒子群优化算法(S-PSO)和综合学习粒子群优化(CLPSO)引入无人机路径规划问题中,其中,使用多目标粒子群优化算法求得的解,其多样性好且收敛速度快,因此在无人机路径规划上表现会更加有前景[12−13]。
1 无人机路径规划问题
假设无人机飞行在足够高的上空可以忽略障碍且用户位置不变的条件下,无人机路径规划的多种问题都可以归结为带时间窗的车辆路径规划(vehicle routing problems with time window,VRPTW)问题。在VRPTW问题中的每个实例下,存在一个无人机基地和若干待满足需求的用户,且在固定的位置。每架无人机从无人机基地出发,经过可满足用户后回到无人机基地。当一个路径规划方案可以使所有用户按时得到满足,且无人机可回到无人机基地,则说明路径规划方案可行。
1.1 VRPTW问题的形式化表示
VRPTW可以形式化表示为一个完整有向带权图G=(C,E)中的优化问题,如下所示。
1)顶点集C:顶点C包括无人机基地点和用户点。其中当i=0时,c0为图的根,表示无人机基地。当i∈[1,n],n为用户数,ci表示用户。
2) 边集E:每条边分别表示2个顶点之间的链接,并且有一个距离属性。形式化的表示即在图G中,边集E={〈ci,cj〉|ci,cj∈C,i≠j},每个边〈ci,cj〉由从变量ci到变量cj之间的欧几里得距离dij表示,其中dij=dji,且距离与时间需要做等价替换。
对于每个用户ci∈C,i∈[1,n]的变量细节如表1所示。
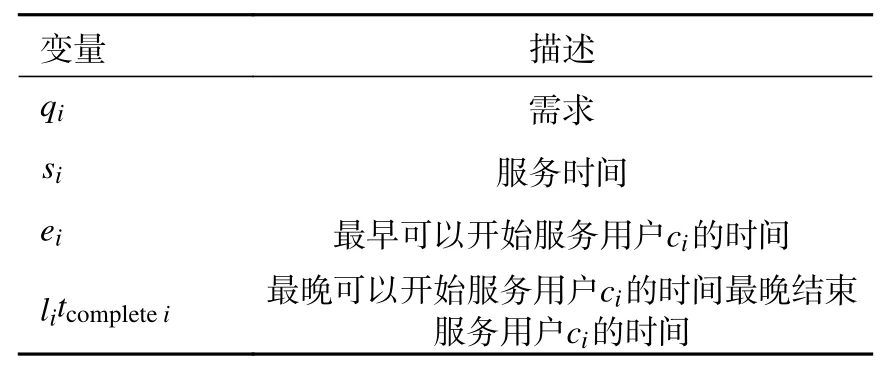
表1 用户细节变量
对于无人机基地c0的变量细节如表2所示。
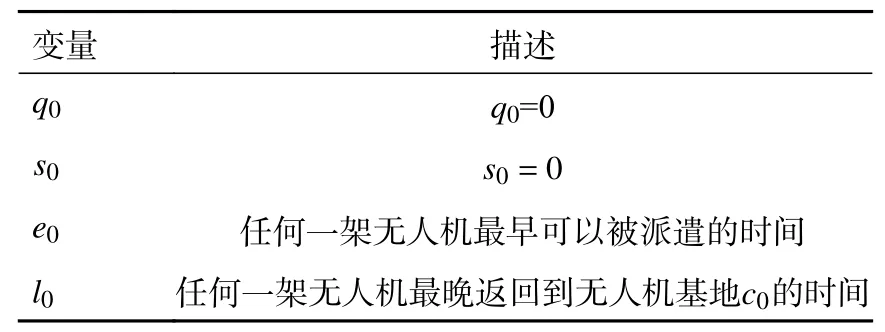
表2 无人机基地细节变量
设无人机基地的无人机vr∈V,其中{r∈[1,|V|]|r∈N}。设计能服务所有用户的路线需要二进制决策变量。

二进制决策变量bri由服务于用户ci的无人机vr来表示。

以RC101为例,如图1所示,集中的点代表无人机基地位置,其余点代表用户位置,不同颜色代表不同的无人机出行路线,此图1表明调用了8架无人机完成了此次任务。

图1 RC101路径规划图
1.2 解的形式
该问题中顶点集C={0,1,···,n},0表示无人机基地,1~n代表用户。每个解xi包含一组可行路径。其中表示解i中的第j条路径,由地的顶点序列组成,并且NVi表示在解xi中使用的从无人机基地到一组可服务用户再回到无人机基无人机数量。
在使用该算法求解VRPTW时,会得到一组可行解,每个解xi包含一组可行路线,。其中表示解i中的第j条路线,并且N表示Vi在解i中使用的无人机数量。解可以由有向带权图、邻接表、邻接矩阵进行表示,如图2—图4所示。以有5个用户为例,顶点集表示为C={0,1,2,···, 5},解的路线集表示为,其中
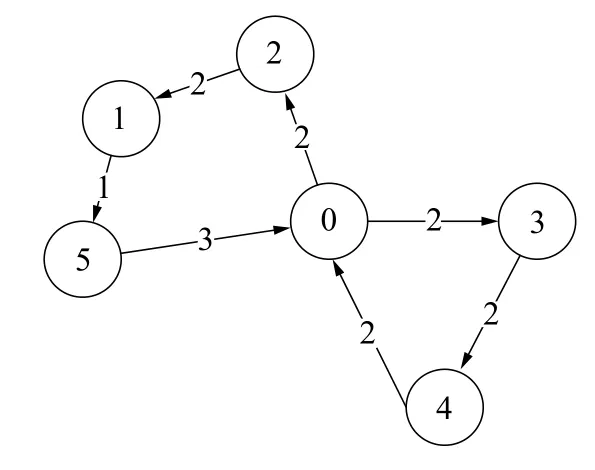
图2 示例有向带权图
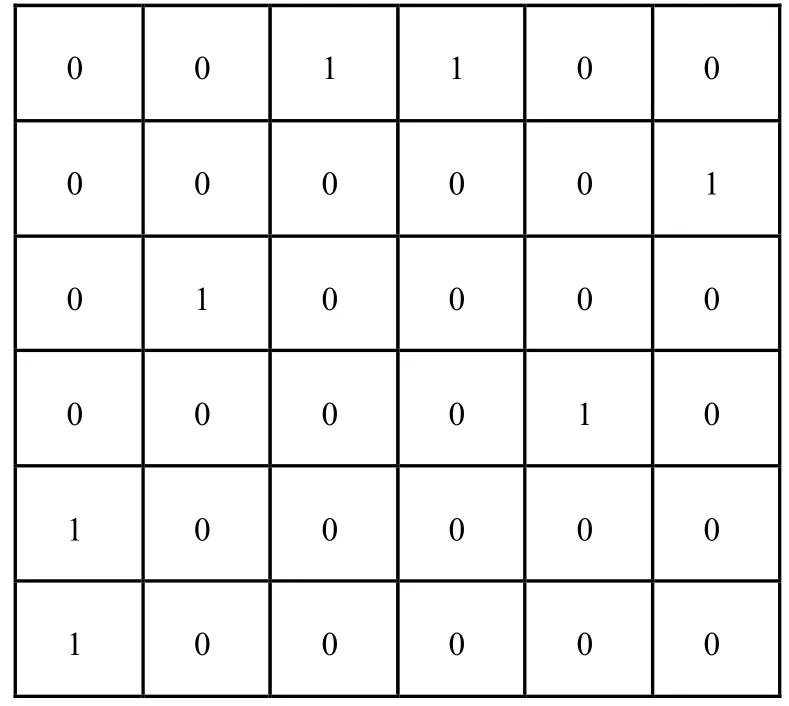
图4 示例邻接矩阵
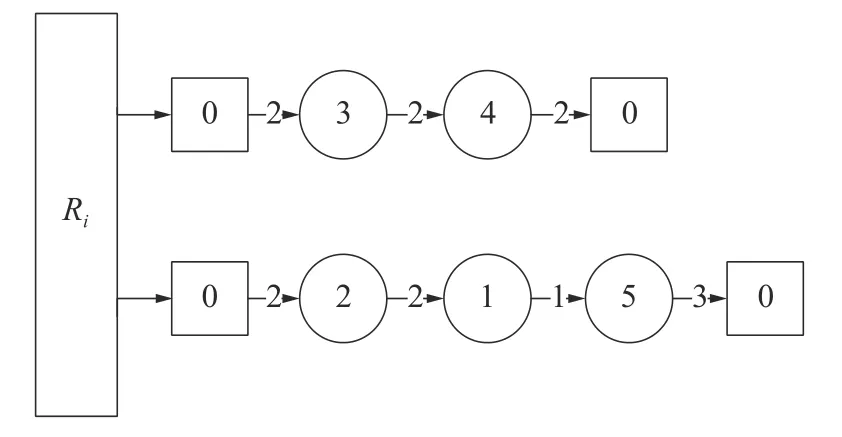
图3 示例邻接图
1.3 约束条件
在VRPTW问题中,有6个约束条件,其中:i为路段起点,j为路段终点,n为用户加无人机基地总数,r为调用的第r架无人机,|V|代表调用无人机数。
1)边与顶点的约束:恰好有一条路径进入和离开与用户相关联的每个顶点,这样后面的公式表示才是成立的。

2)每名用户只能使用一架无人机,且所有路线从无人机基地开始。
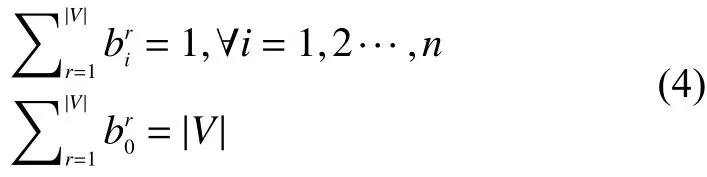
(3)无人机总容量约束:表示每架无人机的负载不得超过其承载能力。

式中qi为用户ci的需求。
4)无人机工作最长时间约束。
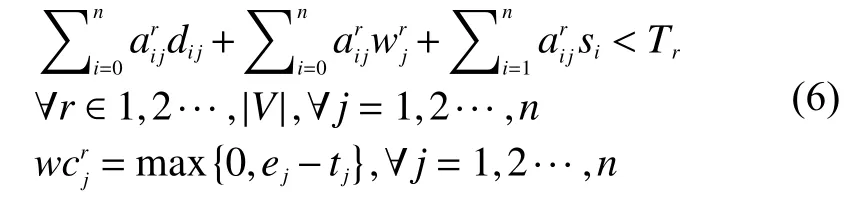
5)每个用户完成时间的约束。

式中:dij为用户ci和cj之间的旅行时间;sj为服务用户cj的时间。
6)每个用户的时间窗约束。
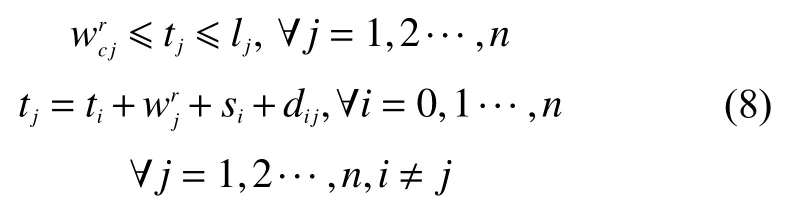
式中:tj为可以到用户cj的时间;lj为无人机vr最晚可以开始服务用户cj的时间。
1.4 目标函数
根据VRPTW的特点,设定了包含冲突的5个目标函数。
1)调用无人机数f1与路线总距离f2。
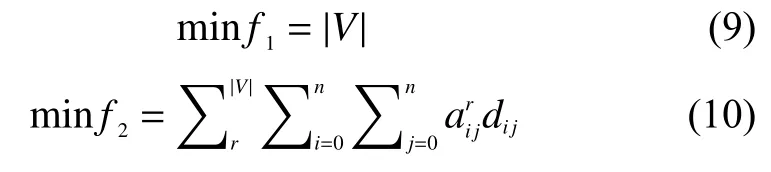
式(9)表示调用无人机数,式(10)表示路线总距离,在文献[9]中证明无人机数量与路线总距离成正比,但路线总距离与无人机等待时间为一对冲突函数。
2)路线总时间f3。
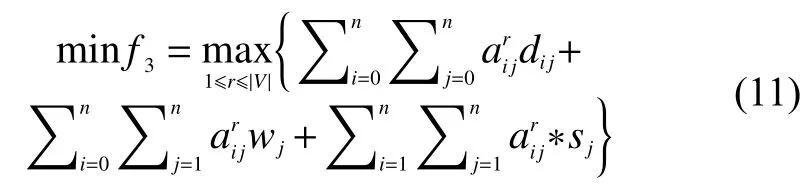
式(11)表示路线总时间。总时间与车辆数量在文献[9]中被证明为一对冲突函数。
3)无人机等用户总时间f4与用户等无人机总时间f5。
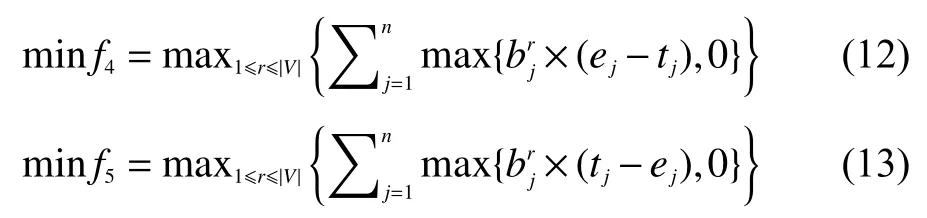
式中:|V|为使用的无人机架数;n为第r架无人机服务的用户数。
式(12)表示无人机等用户总时间,式(13)表示用户等无人机总时间,这2个公式是本文提出的一对冲突函数。
1.5 多目标优化
多目标优化问题可以用函数表示为

式中:RM为目标空间;Ω为决策空间;目标函数F可将决策空间映射到目标空间。
与单目标优化问题不同,多目标优化中的不同目标之间一般需要存在冲突,因此用单目标优化算法往往效果不佳。
在多目标优化问题中,∀2个解x,y∈Ω,当且仅当对于∀i∈{1,2,···,M},fi(x)≤fi(y)且∃j∈{1,2,···,M},fj(x)<fj(y),则x占优,x支配y,与y相比,x是Pareto最优解。使用多目标优化算法可以求得Pareto最优集,Pareto最优集是所有Pareto最优解的集合。
2 两阶段MOCS-PSO/D算法
本文提出的MOCS-PSO/D框架是基于MOEA/D的框架,将多个目标函数进行归一化处理,并使用S-PSO来对VRPTW问题的解进行基于集合和概率的表示,同时结合CLPSO来对粒子进行更新。最后,根据实际的应用情况,对局部搜索策略进行调整,以减少调用的无人机架数。
两阶段算法流程如图5所示。
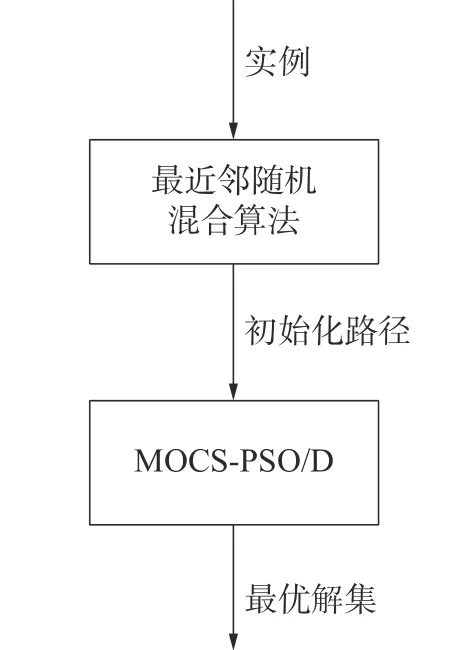
图5 两阶段算法流程图
2.1 粒子速度和位置的表达
在VRPTW问题中,利用邻接矩阵来表示每个粒子的位置,离散的位置表示方式可以适用于S-PSO的位置更新和速度更新公式中。每个粒子的位置由邻接矩阵表示,粒子h在步骤k的位置可以由表示,粒子的位置可以扩展的表示成,每个维表示一个边集,每个边集有2个边,每个边由从无人机基地和用户集中选取2个点组成,其中 δ为当前维度,δ相邻的前后2个点ci,cj∈{1,2,···,δ−1,δ+1,···,m},且ci≠cj。该边集由式(15)表示。

根据每个粒子的位置可以画出一个完整的有向哈密顿圆。其中每个有向哈密顿圆的集合代表要调度的每架无人机在满足约束条件下的出行路线。
速度由边与其出现概率表示,每个粒子的第m维的速度分量用表示。粒子h在步骤k时在m维空间上的速度定义为:,。δ维的边概率集由式(16)表示。

集合Aδ中的边都是与有向完全图G中的状态δ相邻的状态组成的状态对。其中,边〈ci,cj〉出现的概率用p(ci,cj)表示,p(ci,cj)∈[0,1]。在后续对边〈ci,cj〉进行更新时,将根据此概率进行选择。如果p(ci,cj)=0,则表示uhkδ忽略边〈ci,cj〉。
2.2 第一阶段(最近邻随机混合算法)
初始化阶段将混合使用最近邻算法和随机算法两种启发式算法进行路径初始化。
NNH是一种贪心的初始化种群候选解的方法,是在实际设计算法时常用的一种方法。将用户集C和无人机基地集D的数据进行读取,利用NNH建立可行解。具体方法如下。
1)初始化从无人机基地开始的路线,递归地将最近的可满足用户添加到路线中,直到不存在可满足用户,则回到无人机基地。已满足的用户移除用户集。
2)如果用户集C不为空,则转到1),否则终止算法。
随机算法将每次选择的用户更改为随机可满足用户即可。也可将2种算法混合使用。
2.3 第二阶段(MOCS-PSO/D算法)
本文针对VRPTW问题的MOCS-PSO/D框架将阶段一得到的结果作为初始值进行优化。
MOCS-PSO/D框架的执行详细过程如下。
1)初始化:初始化种群大小Psize、目标函数个数N、每个目标函数上的采样个数H,邻居个数T,最大迭代次数gmax,学习率c1、c2,随机数σ1、σ2,线性速度更新权重w,外部更新集EP。生成均匀权重向量,同时使用第一阶段中的解作为初始化粒子。
2)求值和规范化:求得所有粒子以获得目标向量。更新每个目标的上下限。相应地,规范化每个粒子的目标向量。
3)学习者和存档更新:使用粒子的权重向量和其邻域中所有新生成的解以MOEA/D方式更新每个粒子的学习者。使用所有新解基于Pareto优势更新外部存档EP。
4)粒子群更新:对每一个粒子,在CLPSO的速度更新公式中执行基于元素的运算来更新其速度,然后构造一个新的解来更新其位置。
5)局部搜索策略:再对每一个粒子进行局部搜索策略,不断选择用户最少的路线,试图将其中的用户插入其他路线中,依旧可满足约束条件。
6)额外粒子群更新:如果某粒子多次没有进行更新,则对其进行额外粒子群更新策略,使用基于元素的算法运算来更新其速度,然后构造一个新的解来更新其位置。
7)终止:如果满足停止条件,则停止并输出外部储存集EP;否则,转到2)。
2.3.1 速度更新每次迭代k次时每个粒子的位置。CLPSO速度更
CLPSO算法是PSO算法的一个变种,其采用一种新的速度更新规则来防止解的过早收敛,在每次更新时只采用局部最优解进行更新,而不使用全局最优。用于更新VRPTW的S-PSO算法中新规则为

式中:w为随迭代次数线性变化的惯性权重系数;c1为向邻域学习的学习率;σ1为在[0,1]上的随机数;在本算法中,为使用MOEA/D框架后的邻域中随机选择的2个邻居,最后将计算出的最大速度赋值给。
S-PSO是基于集合和概率定义的,因此将其用于VRPTW问题中需要对其中的运算符进行重新定义。
算子1:权重系数与速度算子相乘由式(18)定义,该公式使用公式(19)确定边〈ci,cj〉更新后存在的概率p′(ci,cj),其中p(ci,cj)为原来存在的概率。
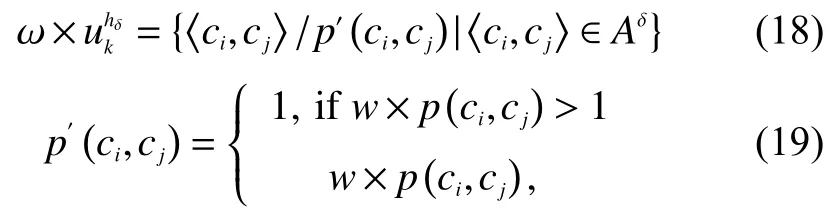
算子2:位置与位置算子相减由式(20)定义。

算子3:c×σ×(位置与位置算子相减)算子由式(21)定义。该公式将使用给定的crisp集合Mδ转化为具有概率的边〈ci,cj〉集合,式(22)利用c×σ用来得到更新后的速度值。
算子4:速度与速度算子相加由式(23)定义,即边〈ci,cj〉被选择的概率将以最大值为准,以从多个粒子中保留下边〈ci,cj〉被选择的最大概率。

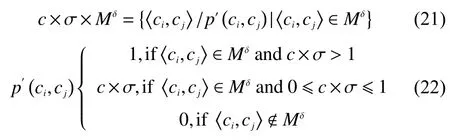
为了更加清晰的进行表示,用定义算子的应用实例进行说明。假设:
可以得到


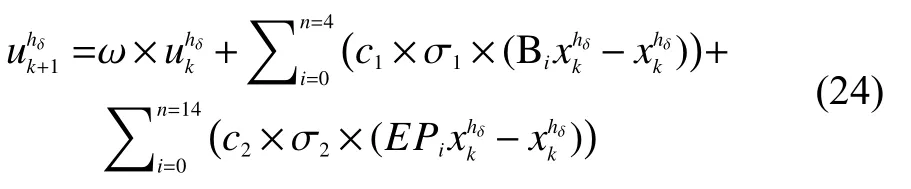
此外针对综合学习策略的缺陷,设置了额外粒子群更新策略,该策略将学习邻域内的粒子及外部储存集EP中解的信息。其中速度更新策略如式(24)所示
2.3.2 位置更新
当粒子位置的边成立时,初始值将设置为[0,1]的随机值,表示可以作为出行路段。位置更新的规则根据式(25)进行完成,这里的‘+’号将根据S-PSO的特点重新进行构造。将由和的crisp集合将在满足约束条件的情况下,经过构造得到。


式中:rand为[0,1]的随机数,当且仅当p(ci,cj)≥rand时,〈ci,cj〉/p(ci,cj)将保存在速度集中,说明当较大时,在经过转换后被保存在crisp集合中的概率更大。在实际计算中,当同一边〈ci,cj〉被多次选中后,即会增加进入crisp集合的概率。
2)为了构造无人机出行路径,该方法将选择一个从无人机基地的可到达点。再依次向后寻找可到达点,直到所有点都不满足,则回到无人机基地。
其中,可到达点的选择将根据以下3个crisp集合依次选择:
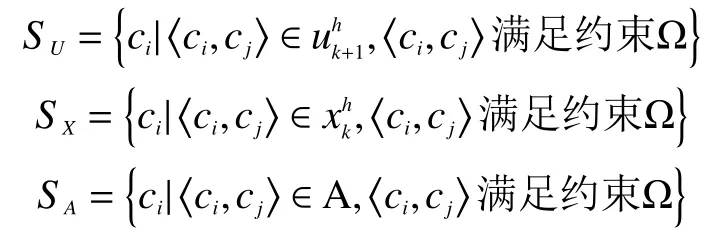
如果S U、S X、S A中都没有可到达点,则将调用新一架无人机出行,且将〈ci,0〉和〈0,cj〉添加到中。
3 实验结果与分析
3.1 数据介绍
本文使用的数据是Solomon在1984中介绍的VRPTW的基准数据集,该数据集是基于几个标准路径测试问题数据集生成的;测试使用的RC1类包含随机和集群地理位置用户的混合;实验数据的用户规模为25。其中用户数据集的属性包括用户编号、横纵坐标、需求量、时间窗和服务时间,无人机数据集的属性包括横纵坐标、最大容量和最大工作时间。
3.2 对比实验设置
实验都在运行30次取平均值后进行结果统计。
为了对比的公平性,对以下对比算法进行了处理。
1)第一阶段采取最近邻随机混合策略(NNH+RANDOM):取实验的随机15个粒子与其他算法进行比较。
2)第二阶段采取单目标遗传算法(GA)和基于集的单目标CS-PSO(基于集的综合学习粒子群优化算法):取随机15次实验的粒子与其他算法进行比较,该算法使用的单目标适应度函数为

3)第二阶段采取多目标算法MOCS-PSO/D:随机取一次实验的外部储存集解与其他算法进行比较。
3.3 运行时间对比
本实验将对4种算法的收敛速度进行对比。如表3所示。

表3 4种算法平均一次实验的运行时间
该实验数据表明,第一阶段的Rand+NNH算法可以仅消耗少量时间即可以搜索到可行解,为第二阶段的算法提供初始粒子。
GA与CS-PSO算法相比,运行消耗时间相对较长,因此选择对CS-PSO算法进行改进。CS-PSO算法与MOCS-PSO/D算法相比时间消耗较少,但考虑到CS-PSO算法每次实验只能得到1个最优解,而MOCS-PSO/D算法一次实验则可以得到15个最优解,从获得解效率来说,MOCS-PSO/D具有比较大的优势,说明MOCS-PSO/D具有很好的收敛性。
3.4 算法性能对比
本实验将从解的多样性方面进行对比。以RC101数据样本为实验数据,图6—图9分别为NNH+RANDOM、GA、CS-PSO和MOCS-PSO/D的实验图,其中从左到右依次为其中一个粒子的路径图、3组目标f1−f2、f1−f3、f4−f5对比的散点图,其中路程和时间已做标准化处理,单位为“1”。
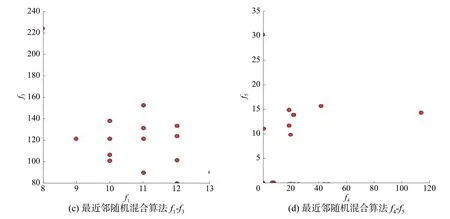
图6 NNH+RANDOM算法结果
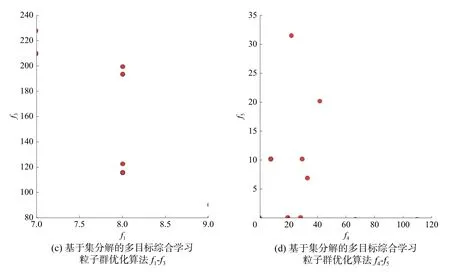
图9 MOCS-PSO/D算法结果
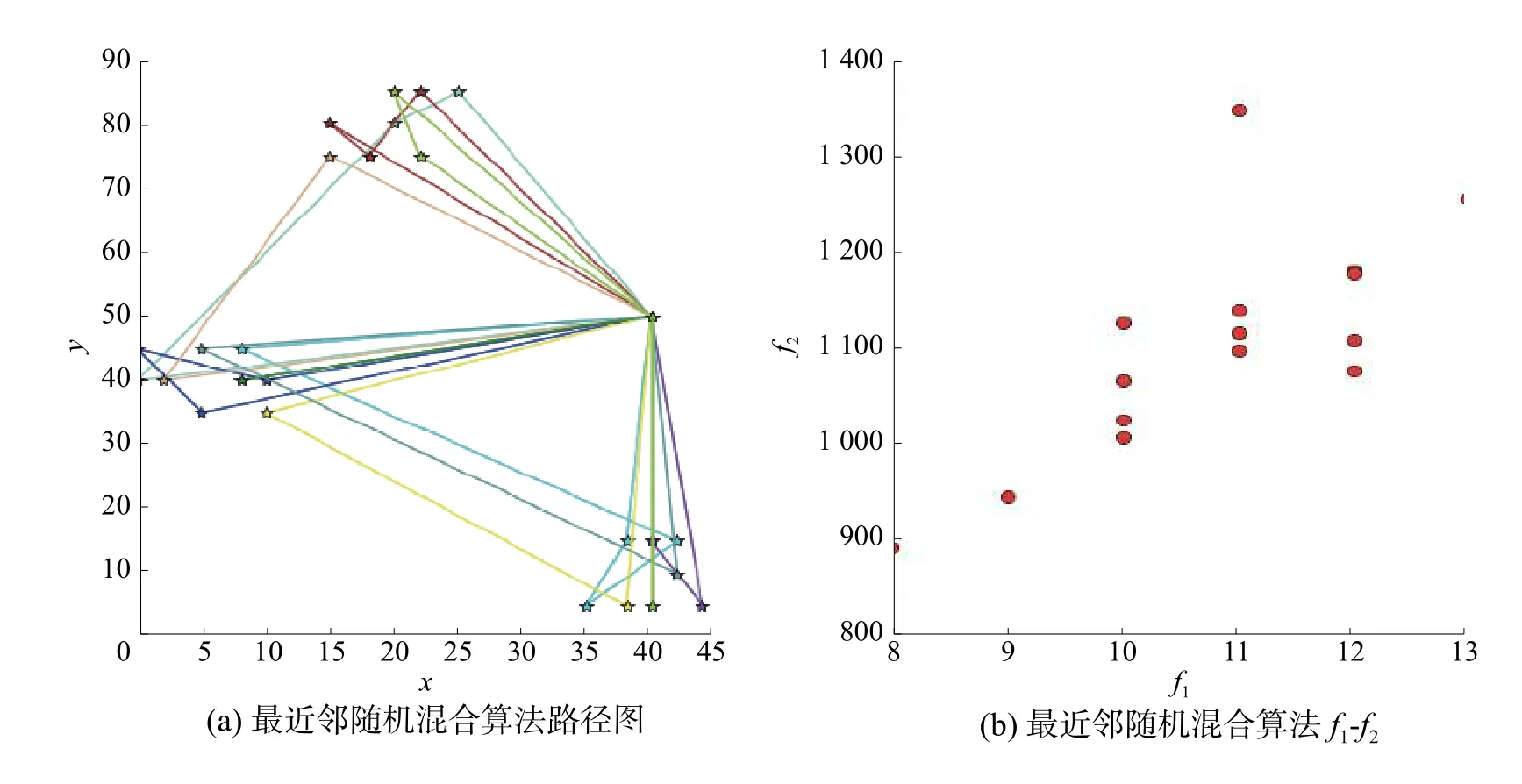
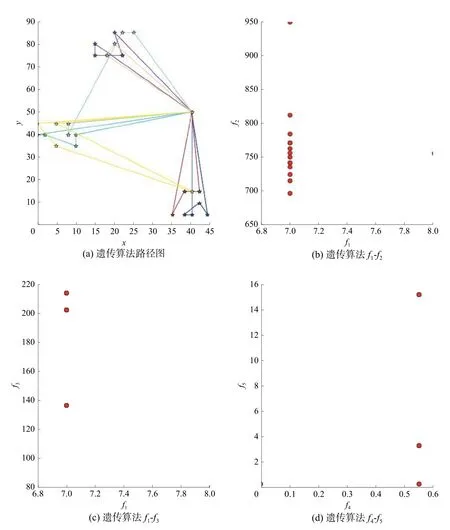
图7 GA算法结果
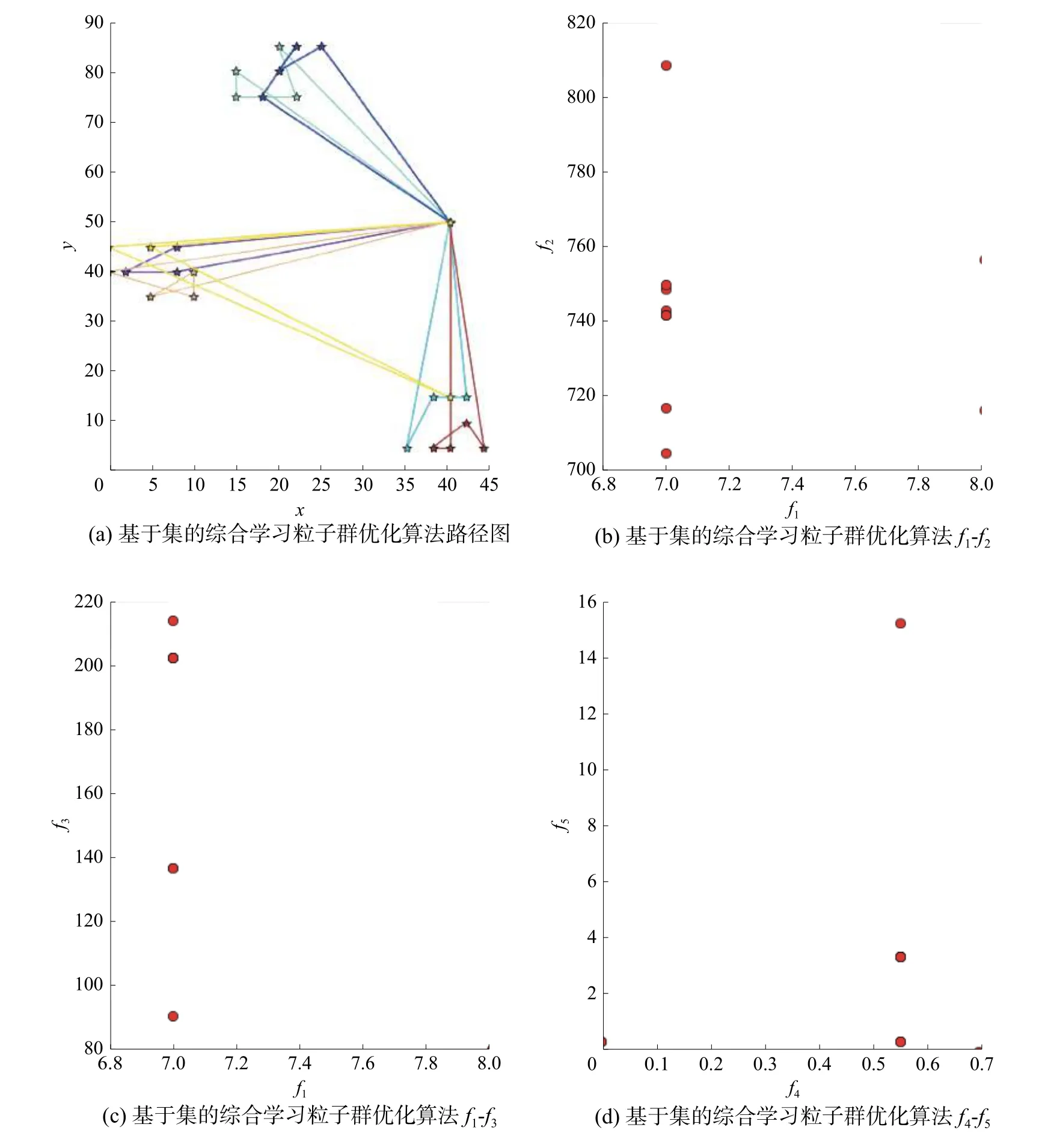
图8 CS-PSO算法结果
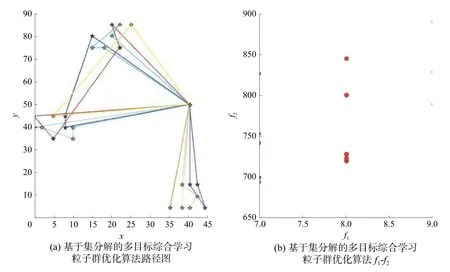
由4组实验图的(a)图可以看出,4种算法都可以有效地找到可行路径,且无人机群可以服务全部的25名用户。由4组实验图的(b)图可以看出,GA、CS-PSO和MOCS-PSO/D都可以显著地降低调用无人机数量。同时,可以从MOCS-PSO/D算法中发现f1−f2为成正比的目标。最后,由4组实验图的(c)(d)图可以看出,MOCS-PSO/D算法搜索到的解的多样性更好,而GA、CS-PSO算法得到的解比较单一。同时,可以从MOCS-PSO/D算法中发现f1−f3、f4−f5为两对冲突的目标。
综上,MOCS-PSO/D算法具有很好的多样性,且可以搜索到质量更高的Pareto最优解。
4 结论
在面向的无人机路径规划问题中,针对VRPTW问题使用提出的两阶段算法,第一阶段为随机贪心混合策略,第二阶段使用的MOCSPSO/D算法在CS-PSO算法的基础上增加了MOEA/D框架,改变了CLPSO和PSO的速度更新公式,使其解可以自适应的在5个目标函数上达到均衡,更加符合实际的应用场景,当某路径规划方案不能执行时,可立刻选择其他备选方案。同时,与随机贪心混合策略、GA和CS-PSO相比,在算法收敛速度、解的多样性上都有很好的表现。
但是本文算法的解求得的调用无人机数量依旧较多,由于该目标为主要目标函数,未来将对该方面进行研究。
猜你喜欢
今日农业(2022年1期)2022-06-01 06:18:10
数学小灵通·3-4年级(2020年11期)2020-12-14 07:05:40
数学小灵通·3-4年级(2020年3期)2020-06-24 05:50:50
测控技术(2018年10期)2018-11-25 09:35:54
军营文化天地(2018年2期)2018-04-20 07:07:58
浙江工业大学学报(2017年5期)2018-01-22 02:03:46
小学生导刊(2017年31期)2017-08-15 00:53:14
小学生导刊(低年级)(2016年8期)2016-09-24 23:55:21
物理与工程(2014年4期)2014-02-27 11:23:08
山西大同大学学报(自然科学版)(2014年3期)2014-01-23 01:56:42