
基于STAR-CCM+的鱿鱼钓船波浪增阻数值计算与球鼻艏选型分析
2021-07-03 05:30李纳刘和炜张彬
中国渔业质量与标准 2021年3期
李纳,刘和炜,张彬
(1. 中国水产科学研究院渔业机械仪器研究所, 农业农村部远洋渔船与装备重点实验室, 上海 200092; 2. 海洋试点国家实验室深蓝渔业工程联合实验室, 山东 青岛 266237)
20世纪90年代以来,鱿鱼钓产业成为中国远洋渔业的重要组成部分,到目前为止,中国已拥有600多艘远洋鱿鱼钓船,分布在世界各大渔场[1]。燃油费在鱿鱼钓船的营运成本中占很大比重,从实际出发,在保持鱿鱼钓船功能和渔获量不变的情况下,优化船舶性能,降低油耗,节能减排成为提高鱿鱼钓船经济性能的重要途经[2]。
船舶在静水和波浪中都具有优良的阻力性能是船舶优化设计的目标,船型设计不仅要考虑在静水中具有较好的阻力性能,还需要考虑在波浪中具有较小的波浪增阻。随着船舶计算流体动力学CFD理论的发展,越来越多的学者通过CFD 数值模拟技术对船舶在实际海况中的运动性能进行研究。陈霞萍等[3]阐述了直型艏与常规球鼻艏船型在静水中的阻力性能与波浪中的阻力性能的比较研究;许贺等[4]探究了不同载况下船舶纵倾对波浪增阻的影响;方昭昭等[5]基于CFD方法建立了数值波浪水池,模拟了规则波浪的生成传播,并对顶浪航行船舶的运动进行了模拟计算研究。远洋渔船因为常年在海上进行捕捞作业,遇到恶劣海况的概率比其他船舶更大[6],因此,结合纵倾、升沉等因素综合分析船舶在波浪中的阻力,进行船型优化更有实际意义。
中国远洋鱿鱼钓船的船长范围为45~75 m,设计航速11~14 kn,傅汝德数0.24~0.30,属于中速船。本研究采用CFD 软件STAR-CCM+对一艘49 m典型远洋鱿鱼钓船(方形系数0.7,傅汝德数0.3)进行了静水及迎浪情况下的阻力预报,并对球鼻艏进行选型分析,比较了鱿鱼钓船无球鼻艏和加装撞角型球鼻艏、上翘型球鼻艏后的阻力性能[7-8],以期为远洋鱿鱼钓船的设计、建造提供参考依据。
1 模型简介
1.1 计算船模参数
计算船舶实船主尺度参数如表1所示,计算中采用缩尺比为1∶20的船模进行计算。利用CATIA进行三维模型建模[9],得到渔船三维模型如图1所示。
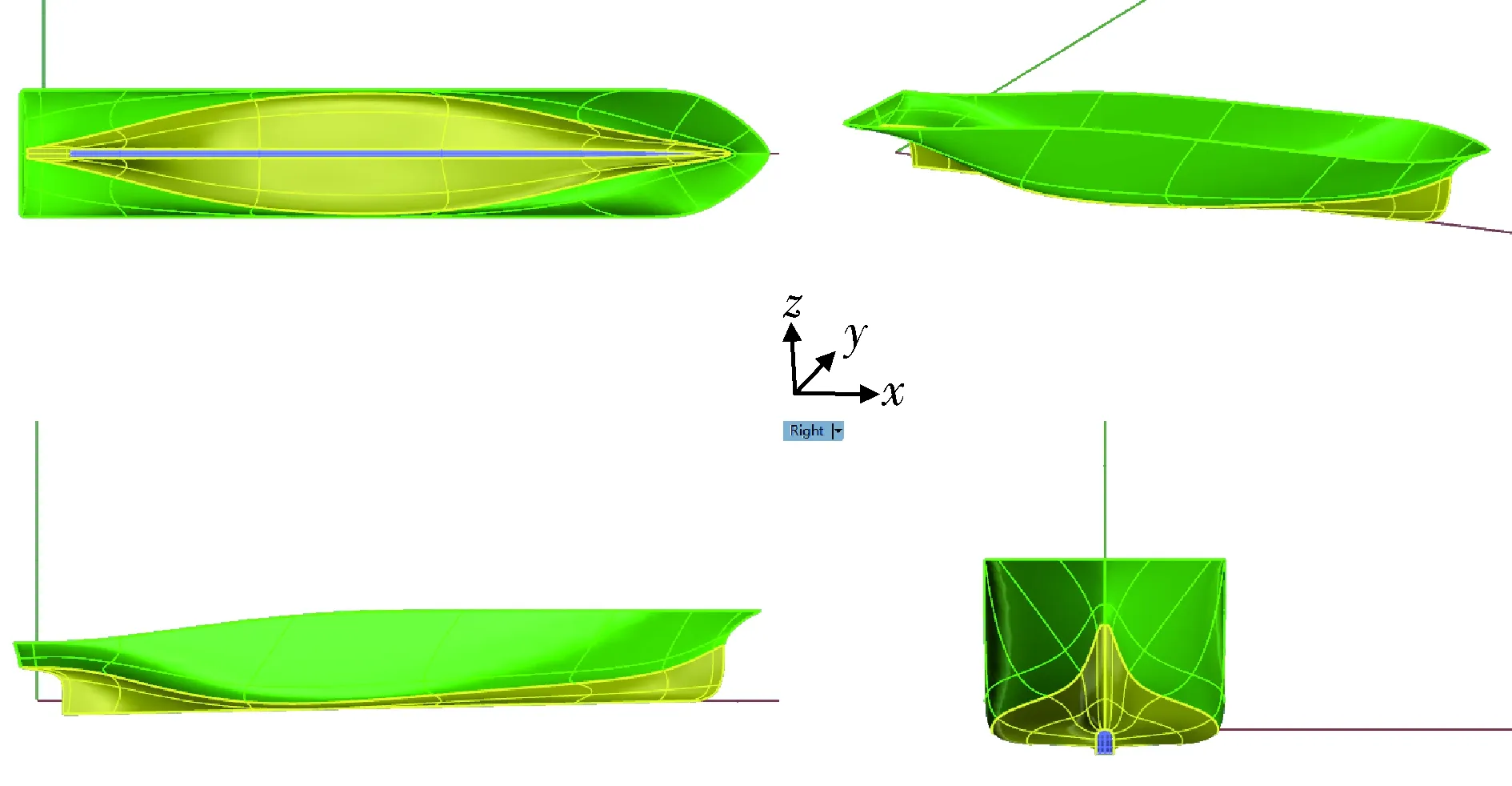
图1 49 m远洋鱿鱼钓船三维模型图Fig.1 3D model of 49 m ocean squid fishing vessel
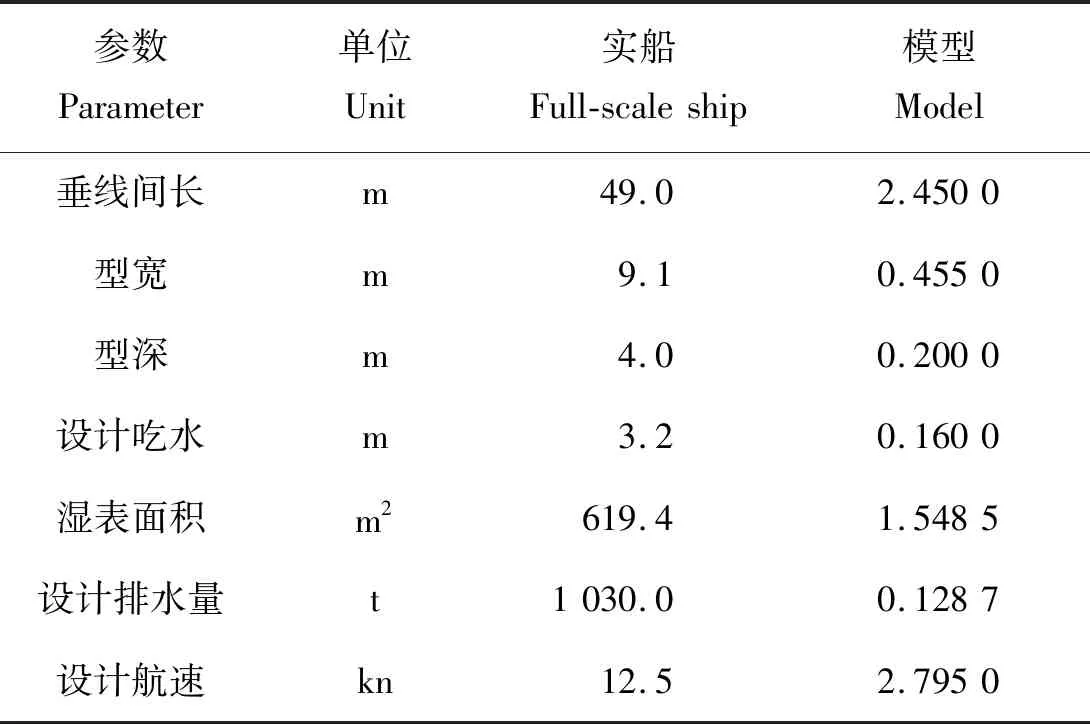
表1 主尺度参数Tab.1 Principal scale parameters
1.2 有航速波浪中直航环境参数
有航速波浪中直航试验类似于船模耐波性试验[9],进行耐波性试验的理论基础为线性假定下的小波浪理论,采用的深水波的周期T、波速c和波长λ分别按下列公式计算:
式(1)
式(2)
式(3)
在规则波中进行船模试验,对一般船型来说,波长范围从0.5LPP到2.0LPP左右,试验波高与船长LPP之比应小于1/50[10]。
2 数值计算
2.1 计算模型网格划分和边界设定
STAR-CCM+是基于有限体积法建立的高度集成化仿真工具,在船舶行业有较为完整的解决方案。其DFBI模型结合自由面模型可以模拟船舶漂浮在海面上的6自由度运动;同时STAR-CCM+的造波边界可以模拟线性波和5阶Stokes非线性波作为来流进行计算,广泛应用于船舶行业,成熟度较高[11-14]。
计算网格划分采用切割体,由于计算中船模仅有纵摇及升沉运动,因此对船体模型采用对称建模[15],如图2和图3所示。船体的中纵剖面边界设置为对称面,速度入口距船首约2.5LPP,压力出口距船尾约3.5LPP,可以保证船体周围流场的稳定性。同时在压力出口边界设置阻尼层消波防止出口处回流影响船体周围的流场,在自由面附近对网格进行了加密处理以有效地捕捉自由液面位置,船体表面附近添加边界层可以更加准确地捕捉边界层流动[16]。

图2 计算域示意图Fig.2 Schematic diagram of computational domain

图3 计算域整体网格划分图Fig.3 Overall grid plot of computational domain
静水直航阻力计算和有航速波浪中的直航计算均采用非定常计算,入口为速度入口。静水直航阻力计算采用VOF WAVE中的静水波边界条件;有航速波浪中的直航计算采用线性波边界。计算利用整体运动网格,采用DFBI模型计算中允许船模具有纵摇和垂荡运动自由度。
2.2 静水直航阻力计算分析
静水阻力计算中,考虑了船模的纵倾和升沉运动,计算开始时流场变化较大,数值结果不稳定,随着计算的进行,流场趋于稳态,船模保持一定角度的纵倾和对应的升沉水平,此时阻力计算结果趋于稳定值。以Vm=1.437 9 m/s(即实船航速12.5 kn)为例,图4为计算过程中船模的升沉运动时历曲线,图5为计算过程中船模的纵摇运动时历曲线,从图中可以看出船模运动已趋于稳定。图6为自由面兴波图,从图中可以明显的看到船体附近形成的开尔文兴波情况。计算中船舶航速在2~18 kn之间每隔2 kn为一个计算点选取,共计9个航速点,不同航速下模型阻力计算结果和实船阻力换算结果见表2。

图4 船模升沉运动时历曲线Fig.4 Time-history curve of ship model heave motion
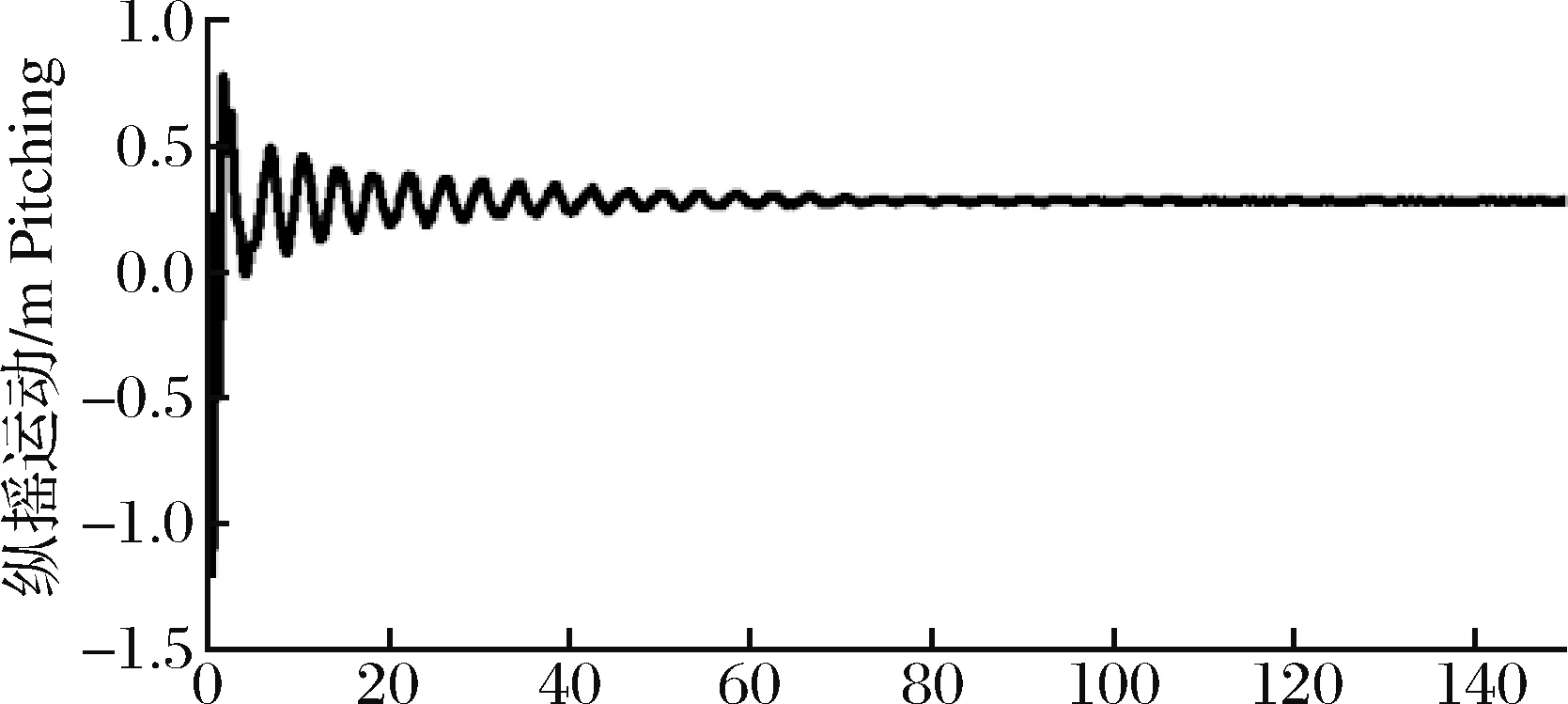
图5 船模纵摇运动时历曲线Fig.5 Time-history curve of pitch motion of model ship

图6 自由面兴波图Fig.6 Free-surface wave-making diagram

表2 模型阻力计算结果和实船总阻力换算表Tab.2 Model test results and real ship resistance conversion table
2.3 有航速波浪中直航增阻计算分析
有航速波浪中直航试验与船模耐波性试验类似,通常该类试验是为预报船舶在海浪中的阻力增值[17]。进行船模试验时,可在规则波或不规则波中拖曳船模,通过一定速率下波浪中的实际平均阻力与静水阻力之差得到海浪中的阻力增值。根据实船航行经验,最大的阻力增值是在顶浪状态,因此大部分的船模试验是对顶浪情况进行的。本研究采用与船模试验相同的流程及方法进行计算模型数值模拟。计算模型在规则波中的运动试验选取设计航速下计算模型在一系列(应不少于10个)频率的波浪上进行模拟,对应波长等于船长附近的频率间隔应取密些[18]。考虑船模的纵倾和升沉运动,规则波频率点及对应的波浪参数如表3所示。

表3 规则波频率点及对应波浪参数Tab.3 Regular wave frequency points and corresponding wave parameters
在波浪直航阻力计算过程中,最初流场变化较大数值结果不稳定,随着计算的进行船模逐渐以某一周期性进行运动,即纵摇及升沉运动均有一定的周期性。以ωm=5.143为例,图7为计算过程中自由面形状,可以看出在艉部有较明显的兴波,同时在船首自由面形状有较为复杂的变化;图8为计算过程中船模的阻力时历曲线,在计算稳定后阻力大小呈周期性变化。

图7 计算过程中自由液面形状图Fig.7 Free surface profile
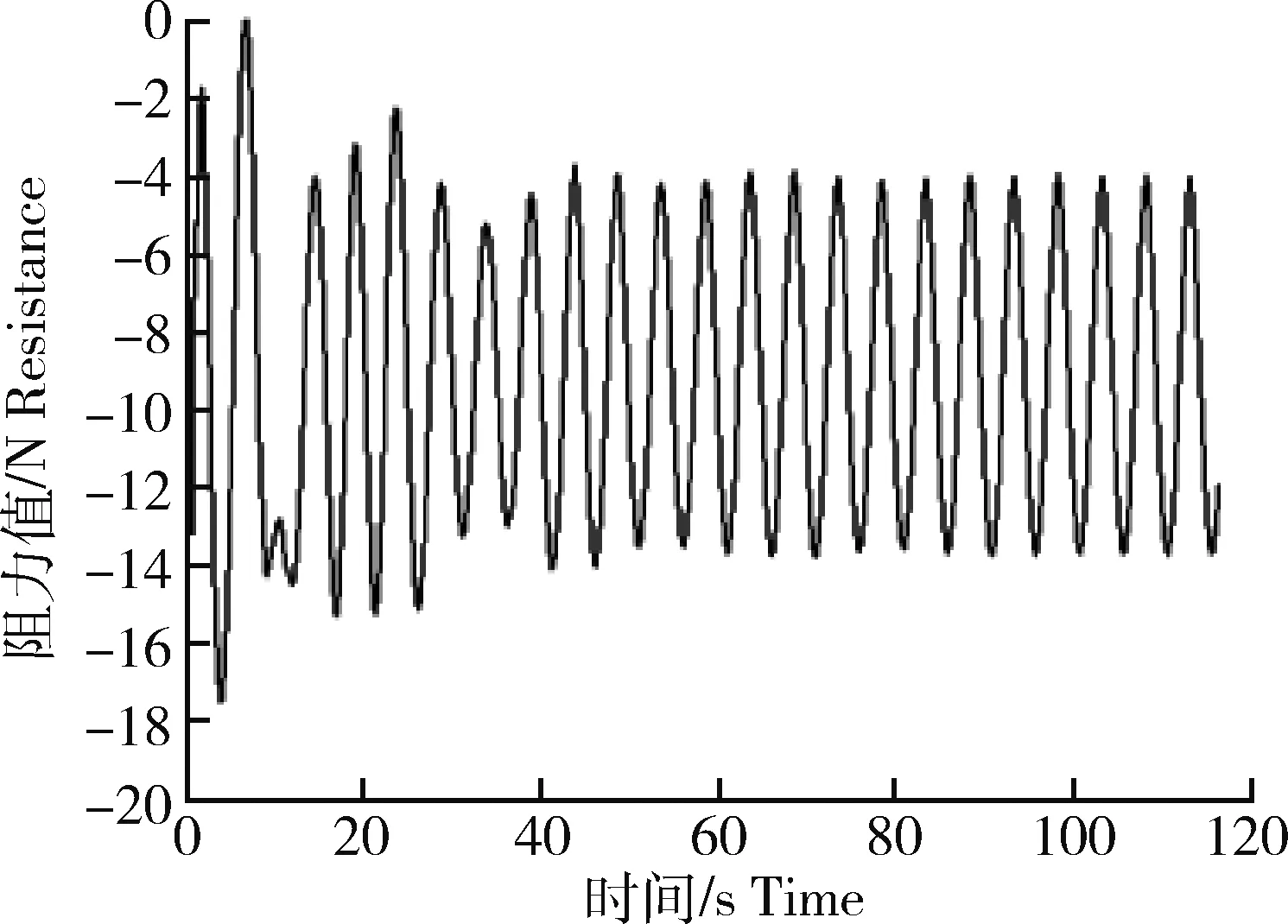
图8 船模阻力时历曲线Fig.8 ime-history curve of resistance of ship model
船模在规则波上的试验波高H应为模型长度的1/40~1/60(即Lm/40~Lm/60),本船根据计算模型长度取数值计算规则波波高为Hm=0.05 m。本船设计航速为12.5 kn,相应船模航速为1.437 9 m/s,船模在设计航速下不同规则波频率下的平均阻力值如表4所示。

表4 不同波频下计算模型波浪中平均阻力值表Tab.4 Average resistance of the model in waves under different wave frequencies
2.4 实船不规则波波浪增阻换算
船舶在波浪上运动,输入波能谱密度,输出船舶波浪增阻谱密度[19]。根据谱分析可得:
式(4)
式中:Sx(ωe)—船舶有航速波浪增阻能谱;Wx(iωe)—遭遇频率的波能谱;Sζ(ωe)—船舶迎浪波浪增阻对规则波的频率响应函数:
式(5)
根据以上公式,将计算模型波浪增阻计算结果换算至不同海况下实船结果。表5给出了两种典型海况下设计航速时的波浪增阻。

表5 典型海况下平均波浪增阻Tab.5 Average wave drag increase at design speed under two typical sea conditions
式(6)
式中:SH(ωe)—波谱密度;ωe—遭遇频率。
通过数值模拟得出设计航速时,实船静水阻力为68 kN,考虑波浪增阻后,在北大西洋最可能海况和世界范围典型海况下船舶的阻力增加了25%和18%。
3 球鼻艏选型分析
3.1 球鼻艏形式
渔船装设球鼻艏的决定因素在于球鼻艏的减阻效果[20-21],而球鼻艏能否降阻取决于船型的方形系数和傅汝德数。根据计算船舶的方形系数和傅汝德数,加装撞角型球鼻艏和上翘型球鼻艏,通过模拟计算,研究不同船首形式对鱿鱼钓船阻力的影响[22]。
通过改变球鼻艏的形状参数计算船舶设计撞角型球鼻艏和上翘型球鼻艏[23],船首形状如图9所示。
图9 船首形状Fig.9 Bow shape
3.2 阻力计算
利用数值模拟方法对加装撞角型球鼻艏和上翘型球鼻艏的船舶进行船体阻力性能计算[24]。将计算结果与普通船首(无球鼻艏)阻力性能绘制成曲线进行比较,其阻力性能曲线如图10所示。由图10可见,静水直航状态,航速8~14 kn,撞角型球鼻艏的减阻效果优于无球鼻艏和上翘型球鼻艏,航速超过14 kn后,上翘型球鼻艏的减阻效果优于撞角型球鼻艏。设计航速12.5kn时,撞角型球艏船型阻力降低了15%,效果最显著。

图10 不同形式球鼻艏阻力性能曲线Fig.10 Resistance performance curves of bulbous bow in different forms
为了比较球鼻艏在波浪中的失速情况,计算船模在规则波和不规则波上迎浪时的阻力[25],将计算模型波浪增阻计算结果换算至两种典型海况下设计航速时的平均波浪增阻,结果如表7所示。与普通船首(无球鼻艏)船型相比较,撞角型球鼻艏和上翘型球鼻艏船型波浪增阻都降低了,撞角型球鼻艏波浪增阻为21%和14.7%,分别降低了16%和17%,减阻效果最显著。因此,对于方形系数0.7,傅汝德数0.3的远洋鱿鱼钓船,采用撞角型球鼻艏不仅能有效地降低船舶静水阻力,还能降低波浪中的阻力增加。

表7 两种典型海况下设计航速平均波浪增阻Tab.7 Average wave drag increase at design speed under two typical tea conditions
4 结语
普通船首鱿鱼钓船在北大西洋最可能海况和世界范围典型海况下设计航速12.5 kn时的平均波浪增阻占静水阻力的25%和18%,造成渔船在实际航行中失速,因此,在设计初期计算主机功率时要考虑根据渔船作业海域实际海况波浪增阻增加功率储备。
加装撞角型球鼻艏后鱿鱼钓船在设计航速时的静水阻力降低了15%,两种典型海况下,波浪增阻降低了16%和17%。因此,对于船长范围45~75 m,设计航速11~14 kn,傅汝德数0.24~0.30的远洋鱿鱼钓船,加装撞角型球鼻艏后船体的静水阻力和波浪中阻力减阻效果最优。
猜你喜欢
中国典型病例大全(2022年10期)2022-05-10
医学食疗与健康(2022年3期)2022-04-23
中国典型病例大全(2022年9期)2022-04-19
房地产导刊(2022年4期)2022-04-19
中国药学药品知识仓库(2022年2期)2022-03-23
都市人(2021年11期)2021-12-20
价值工程(2019年36期)2019-01-11
水运管理(2017年11期)2018-01-02
体育时空(2017年7期)2017-08-03
文苑(2016年14期)2016-11-26
