智能机器人在农业自动化领域的应用
2021-07-01 02:54张华瑾郭山国杜海彬张长军
湖北农机化 2021年11期
张华瑾 郭山国 杜海彬 张长军
(河北机电职业技术学院,河北 邢台 054000)
1 农业自动化的简要分析
1.1 农业自动化的分类
1.1.1 现有农业装置基础上进行自动化改造
在现有农业装置设备基础之上进行自动化改造,是实现农业自动化的第一步,也是基础步骤。对正在适用的农业装置和设备进行自动化改造可以在很大程度上提升农业机械设备的操作性能和作业效率,而且也可以在一定程度上有效控制自动化的改造成本,节省人力及物力资源,降低农民的劳作负担。
1.1.2 现有农业机械基础上实现无人自动操作
无人自动操作是农业自动化的重要标志之一。现有农业机械基础之上实现无人自动化操作,可有效克服人工操作的弊端,突破人力的局限,诸如一些危险性比较高或者长期重复操作的作业便可以交由自动化技术来完成,其可以借助当前先进的计算机或者无线遥控等技术来远程操控各类机械设备,同时还能够有效提升设备操作的精准度。
1.1.3 农业智能机器人
农业智能机器人,从本质上讲,还是借助各种先进的科学技术以及程序软件来进行控制和执行操作指令的一种形式。智能机器人可有效感知周边环境的变化,也可及时采集农作物的生长信息,对农作物的发展走向及时做出准确辨别和判断等等。农业智能机器人未来将会成为农业自动化领域中最具影响力的技术之一,其将慢慢取代传统人工来继续完成各项农业作业。
1.2 农业自动化的体现
1.2.1 信息自动化
农业自动化之信息自动化是建立在计算机网络信息平台基础之上的一项自动化内容,信息自动化即实现了农业生产数据的共享化,建立起农业信息处理数据库来实现对农业以及农产品信息以及数据的高效管理,提升具体管理质量和水平。
1.2.2 生产自动化
生产自动化,即从原材料的选择到加工再到生产都可实现自动化,这样一来便可在一定程度上有效缩减生产成本,降低对人力资源的依赖性,与此同时提升实际生产效率。
1.2.3 机械设备自动化
机械设备自动化,即实现设备的自动控制,不再需要人力资源的全程把控。机械设备自动化不仅仅可以帮助农民执行生产和操作任务,而且其伴随着专业科技水平的提升,有越来越多的机械设备都实现了自行检测,自己检测出问题,自行进行优化和处理。
1.2.4 物流自动化
在自动化物流环节,借助运输的自动化性能,为机械制造提供便捷,同时降低整体的生产成本。
2 智能机器人的概述
在现代农业领域中,智能机器人的设计主要包括信息的自主采集、信息的高效处理和科学自主的逻辑判断等功能内容,为进一步实现农业自动化领域用智能机器人,需要科学地对智能机器人的识别能力、避障能力等进行深入研究,并且要对技术成本做出更高规格和标准的控制。
目前来说,农业自动化领域所使用的智能机器人,研究和关注的技术重点主要体现在以下几个方面:
(1)目标探测和定位。目标的探测和定位,指的便是智能机器人的视觉技术,即依靠视觉技术来高效识别需要作业的目标,然后按照既定的标准和要求来精准完成好作业任务,保证作业质量。
(2)自动导航和避障。在农业自动化领域当中,一般智能机器人是需要持续作业和灵活作业的,所以智能机器人必须要具备高水平的自动导航和避障功能。要保证对地图匹配技术、GPS定位技术进行科学合理地应用,确保智能机器人在实际作业过程中能够合理躲避各种各样的障碍物,实现连续作业和灵活作业的效果,提升运行质量。
(3)手臂抓取和形态控制。智能机器人在参与农业生产作业的过程中必然会涉及到一些农作物的抓取和控制动作,如果智能机器人在手臂抓取和形态控制方面的技术研究并不是很精准,那么其很容易造成农作物的损伤,进而影响到农作物的产量。
(4)信息融合。智能机器人在具体应用过程中必然要对农业生产环境的基本情况作出全面的分析,要整合各种传感器所采集到的数据信息资源,以此为基础来进行逻辑层面的判断。智能机器人需要针对不同的环境来随时进行信息的收集、融合、分析以及处理,以此来确保智能机器人的应用效果。
3 当前智能机器人在农业自动化领域中的具体应用分析
3.1 在农作物采摘方面的应用
根据采摘的农作物的不同种类,我们一般会安排不同的采摘机器人来进行采摘。
以采摘西红柿这一农产品为例,采摘西红柿的智能机器人主要有执行装置、视觉检测装置以及操作臂3个部分组合而成。在这些构成元件当中,视觉检测装置上会安装彩色摄像装置,进而对成熟和未成熟的西红柿进行区分,而且采摘西红柿的智能机器人手臂设计会比较长,因此,它的操作范围会更加广泛一些,此外通过视觉检测装置也可对障碍物进行有效侦查并及时避开障碍物。还有,目前所使用的用于采摘西红柿的智能机器人都会在端部执行装置当中设置柔软衬里,里面也会安装压力传感装置,这样便可以有效避免损坏西红柿情况的发生。

再以采摘苹果为例,一般采摘苹果的智能机器人都会设定一个较为固定的尺寸,比如将采摘的空间设置在5 m2左右。采摘苹果的智能机器人是由3个旋转关节和一个移动关节组合而成的,执行机构是带有压力设备的三针引脚。采摘苹果的智能机器人判断苹果是否成熟主要是依靠电光传感设备来完成的,现阶段采摘苹果的智能机器人在辨别苹果成熟度方面的准确性可达90%以上。

下面是关于采摘类机器人的操作流程示意图,其流程是:(1)将传感器和红外遥控器采集到的信号都输入到主控制板当中;(2)主控制板对所接受的信息进行妥善处理之后输出控制三自由度机械臂和履带底盘结构的机器人,用红外遥控机械臂来抓取果实。
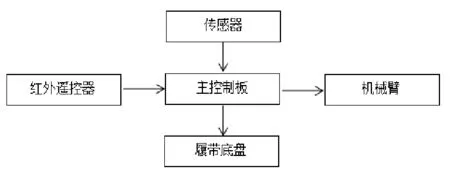
采摘机器人操作流程图
3.2 在农作物嫁接中的应用
嫁接是农作物生长过程中需要使用到的一项核心技术,近些年伴随着嫁接技术的发展,有越来越多建立在嫁接技术基础之上的新品种在市场上面出现开来,为农作物发展开辟了全新的思路和空间。关于农作物嫁接方面的智能机器人,目前使用范围最广、使用频率最高的智能机器人之一是日本的TGR嫁接技术研究院研发的一款专门用于各类作物执行嫁接工作的智能机器人。对于农作物而言,嫁接一般会经历切割、连接以及拣选3个主要过程。嫁接类的智能机器人采用的是全自动模式,也就是说从幼苗的挑选开始便已经实现了自动化,其可以自主对适合嫁接的幼苗进行检测,如果发现有缺陷或者其它不合适的幼苗,智能机器人会直接将其排除在外,因此,由智能机器人完成嫁接工作的成功率是非常高的。
3.3 在喷涂农作物方面的应用
在喷涂农作物方面应用到的智能机器人,其成功融合了自动喷雾控制器、先进的仪表以及压力设备等多种先进技术的优势。一般情况下,在喷涂农作物方面使用到的智能机器人是依靠传感器接收的电磁信息来开展作业的,其在喷药的过程中,电流经过按照特定规则布好的电缆,并在其附近形成特定的电磁场。这样一来,喷涂农作物的智能机器人便可以实现对农作物的全范围喷洒,确保操作范围内的所有农作物都可以接收到药物的帮助。除此之外,喷涂农作物的智能机器人都会安装一个超声波传感器和一个接触感染系统,其不仅可以智能地判断方向,判断喷洒作业是否要进行拐弯或转向,而且可以有效检测周围一定范围内的情况,一旦发现周围存在障碍物,便可以进行独立停机喷洒。在与障碍物的接触时,传感器会自动发出警告信号并执行相应的保护措施,同时也可以人工手动按下位于机器人两侧的手动按钮实现人工手动操作停止。
4 如何进一步推动智能机器人在农业自动化领域的广泛应用
4.1 强化农业基础设施和网络服务平台建设
(1)结合各村实际情况来加强农村信息基础设施建设,确保宽带和网络的全覆盖,为农业自动化领域顺利应用智能机器人奠定坚实的基础。(2)秉承一切从实际出发的原则来进一步健全和完善农业网络服务平台,借助网络服务平台的影响力来为智能机器人在农业自动化领域中的应用寻求更多的资源支持。
4.2 持续加大对智能机器人的研究力度
智能机器人虽然被广泛应用在了农业自动化领域,并呈现出了较为理想的应用效果,但是,这并不意味着智能机器人技术就是足够完美的,其的确还存在着非常大的上升空间。因此,相关部门要进一步加大对智能机器人的研发力度,在加大对农业专用芯片、传感器等基础元器件以及农业无人机、农业机器人等智能化设备研发应用的支持力度的同时,着力培养农业领域融合解决方案的相关科研人员,催生农业领域与人工智能交叉融合的优秀解决方法。
4.3 更新现代农民的思想观念,培养新型农民
我国农业要想获得更多的发展成果,实现进一步的创新和升级,其在依靠先进科学技术的同时还需要高度关注起广大农民的实际情况,要意识到只有广大农民接受和应用了新的技术才能够从根本上推动现代农业的可持续发展,农业自动化才算真正拥有了广阔的市场。所以,相关部门在推广和普及智能机器人的过程中也要逐步渗透和传递先进的农业生产理念和管理方式,要从根源上去转变农民的思想意识,让他们从内心深处去真正接受新知识、新技术和新理念。
5 结语
综上所述,智能机器人只是众多智能技术中的核心代表,以智能机器人为代表的自动化技术才是推动我国农业现代化的重要力量。在农业自动化发展过程中,一定要给予这些先进技术足够的重视和支持,要将先进技术的价值落到实处。
猜你喜欢
今日农业(2022年16期)2022-11-09
今日农业(2022年15期)2022-09-20
今日农业(2022年13期)2022-09-15
今日农业(2021年16期)2021-11-26
文苑(2018年23期)2018-12-14
文苑(2018年19期)2018-11-09
文苑(2018年17期)2018-11-09
文苑(2018年21期)2018-11-09
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07