大型水利工程中无人机航测的应用
2021-06-30 08:32陈占军
工程技术研究 2021年10期
陈占军
河北省水利水电第二勘测设计研究院,河北 石家庄 050021
在科学信息技术不断发展的背景下,工程建设项目中所应用的测量技术也逐渐迈向了科技化发展方向。在大型水利工程中,由于工程建设范围广,测区自然地理情况复杂,存在众多对水利工程测量不利的影响因素。当前,水利工程项目如果采用传统测量技术,不仅会花费大量的人力物力,增加成本消耗和实际测量难度,还会延长测量周期,甚至影响工程项目整体质量和进度。因此,文章所探讨的大型水利工程中无人机航测的应用具有重要现实意义。
1 无人机航测技术概述
在对水利工程项目进行测量的过程中,无人机航测技术的应用主要通过搭建无人机平台,搭载相关的航测设备,在航飞的过程中获取相应的数据信息,通过专业的摄影测量软件对数据信息进行全面的分析与处理,生成测区地形图、正射影像、三维模型等测量产品,进而服务于设计、施工及运维管理。无人机航测技术的应用主要是通过外业航飞、内业处理等相关设备技术完成产品制作。为了保障无人机航测工作的顺利实施,操作人员需要严格控制不同测量阶段的无人机航测内外业质量。
2 飞行平台的选择
2.1 无人机飞行平台
文章所采用的成都纵横CW-15型垂直起降固定翼无人机,具有专业的地面站控制系统软件和先进的工业级飞控系统,可以在少量人工干预的情况下,有效地开展低空数字航空摄影。通过设置航测参数,搭载高性能航测相机,获取高分辨率相片,从而满足各种大比例尺地形图测量和高精度DEM、DOM、三维模型产品的生产。CW-15型垂直起降固定翼无人机控制平台的主要系统参数如表1所示。

表1 CW-15型垂直起降固定翼无人机控制平台的主要系统参数
在实际项目中,无人机平台所搭载的相机可分为普通高分辨率相机和专业定制相机。拍摄方式主要包含定点和定焦两种。
2.2 地面控制系统
地面控制系统主要采用CWCommander地面站软件,该软件不仅具备航线设计、飞行任务规划与执行功能,而且能够遥测数据监控和进行飞行数据回放分析。在无人机飞行航测过程中,其航测半径达到35km左右,可以有效地对大范围水利工程项目进行测量。
3 无人机在大型水利工程中的综合应用
该水利工程项目位于雄安新区,主要为雄安新区高标准防洪堤建设、穿堤建筑物建设以及河道疏浚,主要测量内容为1∶500、1∶1000大比例尺地形图和测区三维模型。测区范围内河道总体流向为西北至东南方向,堤顶高程为19.5~22.9m,主槽高程为3~18m,堤高一般为4~7m。主槽现状:两岸主要为农田,河槽蜿蜒曲折,内多沙坑,水深流急,河槽两侧坡坎高且陡,有坍塌危险。综上所述,该项目不便于进行人工测量,因此采用无人机航测。
3.1 测区像控点布设
为了保证测量成果精度,尤其是高程精度,需要布设一定数量和密度的像控点,像控点一般要求图根级精度。为了保证像控点精度,测区应布设高等级平面和高程控制网(该项目首级控制网平面为五等,高程为三等),并以此为起算数据进行像控点测量。根据相关规范、精度估算和实际工作经验,像控点间距一般控制在300~500m,且尽量布设在航向及旁向重叠范围内,像控点要均匀覆盖整个测区,并布设适当的检测点。像控点类型主要分为两类:一是现场制作,采用红(白)油漆涂绘在硬化路面,标识出中心位置,多采用L型和十字型,标志尺寸≥70cm,利于判读和刺点;二是预制靶标,靶标尺寸为70cm×70cm,主要用于耕地或滩涂荒地中的像控点布设。
3.2 外业航拍
采用成都纵横CW-15搭载哈苏X1D相机结合大疆精灵4 RTK无人机进行高分辨率倾斜摄影测量。
(1)主要技术参数。基准面GSD(地面分辨率)为4cm。哈苏X1D传感器尺寸为43.8mm×32.9mm,总像素为5000万,像素尺寸为8272×6200,像元大小为5.3μm,相机镜头焦距为30mm,相对航高为226.6m,绝对航高为236.6m。精灵4 RTK基准面分辨率优于3cm。传感器尺寸为13.2mm×8.8mm,有效像素2000万,像素尺寸为5472×3648,像元大小为2.4μm,相对高度为80~100m。
(2)航摄分区和拍摄架次划分。测区最大高差为12m,远小于相对航高,因此就重叠度保持及满足GSD要求而言,无须进行航摄分区。但由于无人机采用锂聚合物电池作为动力能源,续航时间偏短,综合考虑测区形状及飞行安全和作业效率等因素,将测区分为2个子区,子区一按南北向飞行,子区二按东西向飞行。根据测区地形情况、起飞场地情况以及摄影分辨率要求等因素,使用CWCommander软件进行自动航线设计。飞行时航向重叠度80%、旁向重叠度为75%。精灵4 RTK主要对重点区域进行近景多角度航拍摄影,飞行时航向重叠度、旁向重叠度均为80%。为了满足精细化建模要求,进行“井”字式飞行,东西向、南北向各飞行一次,确保重点区域影像全覆盖。
在设计航线的过程中,设计人员需要全面分析光照方向、航线方向的风力以及河流方向等因素。
3.3 空中三角测量
空中三角测量采用专业摄影测量软件,将相机参数、影像数据、POS数据导入软件,然后进行多视角影像特征点密集匹配,并以此进行区域网的自由网多视影像联合约束平差解算,建立空间尺度可以适度变形的立体模型,完成相对定向;将外业测定的相片控制点成果在内业环境中进行转刺,利用这些像控点,对已有区域网模型进行约束平差解算,将区域网纳入精确的大地坐标系统中,完成绝对定向。
3.4 三维模型及DLG生产
将空中三角测量的成果数据直接提交生成三维TIN格网构建、白体三维模型创建、自助纹理映射和三维场景构建,最终获得测区的实景三维模型。将模型数据导入数字摄影测量工作站进行DLG的采集工作,结合线划图要求和模型数据,判读模型信息,并使用规范规定的符号表示地形地貌,对无法判别和有疑问的地方要进行外业调绘、补测。
3.5 精度分析
采用GNSS RTK方法对三维模型和地形图进行外业检测,所得DLG检测结果如表2所示。由表2可知,无人机航测技术在控制好航测内外业环节和关键技术的基础上,可以达到大比例尺测图和高精度三维模型生产的要求。
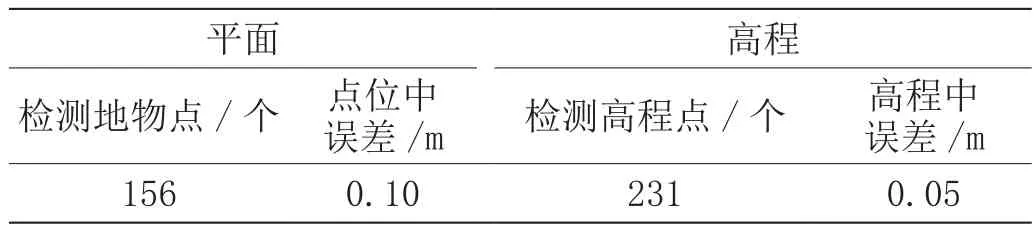
表2 DLG检测结果
4 航摄实施及技术难点分析
该项目所涉及的水利工程测区整体地形地貌较为复杂,测区周边多村庄,且周边空域较繁忙,航飞窗口期短。在无人机进行航测的过程中,地面站无线监控设备与无人机之间的距离相对较近,但存在周边信号干扰风险,可能对无人机航飞造成不利影响。在无人机航飞前,需要设计整体的航行线路,并且每一个环节都需要进行反复检查。航测前要根据成果精度要求,科学合理地布设像控点,像控点的采集要精确可靠。在无人机进行航测的过程中,地面站工作人员要实时监控无人机航测状态,全面分析外界气象、光线等环境变化情况,确保飞行安全和航拍成果质量。在内业处理过程中,各项参数要设置正确,重点检查加强空中三角测量等关键环节的质量。
5 结束语
随着无人机航测技术的迅速发展,航飞技术和软件处理能力也愈加完善,但是在大型水利工程项目中,还未真正发挥其作用。无人机航测在复杂的环境中作业时,所受到的外界影响因素相对较多,内业处理软件性能参差不齐,价格相对较高,只有对不同的影响因素进行分析,并在项目实测中不断积累经验,才能真正地解决无人机航测存在的问题,提高无人机的航测数据精度和应用普及度。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
河北地质(2021年4期)2021-03-08
西部交通科技(2021年9期)2021-01-11
水利建设与管理(2020年5期)2020-06-18
水利规划与设计(2020年1期)2020-05-25
中国铁道科学(2019年5期)2019-10-19
智能建筑与智慧城市(2018年11期)2018-11-28
测绘通报(2018年10期)2018-11-02
中国资源综合利用(2017年2期)2018-01-22
水利水电工程设计(2017年1期)2017-05-17