
低空无人机航空摄影技术在矿山地形图测绘中的应用分析
2021-06-30 01:44:22邹江
世界有色金属 2021年7期
邹 江
(贵州省有色金属和核工业地质勘查局五总队,贵州 安顺 561000)
1 无人机摄影测量技术概述
无人机摄影测量系统一般由飞行平台、任务装置、地面控制站等部分组成。其中飞行平台常用的有固定翼平台和多旋翼平台两种,以飞马D200为例,其飞行平台主要包括机身、动力装置、飞行控系统;任务装置主要有高分辨率光学相机、激光雷达等;地面控制系统主要包括显示系统、控制系统和数据传输系统[1]。
2 无人机摄影测量技术流程
2.1 技术准备
航摄任务下达后,根据航摄任务情况收集并分析测区资料数据,开展实地踏勘工作,选定无人机的起降位置。
2.2 航线设计
根据测图方法、仪器设备、成图比例尺和成图精度等设计航线,航线设计时主要考虑以下几个方面:①重叠度:地形起伏、飞机飞行状态及航高等对重叠度均有影响,规范规定无人机航向重叠度60%~80%,旁向重叠度15%~70%。②航摄高度:根据成图比例尺与航摄比例尺的关系,设计合适的行高。③航摄基准面:航摄区内的地形高低起伏,无人机的航摄面应根据测区内最高点和最低点的平均高程确定航摄基准面高度。④除以上设计参数之外,还应进行像移量和曝光时间设定。
2.3 测区划分及航线敷设
航摄区面积大、地形条件复杂时,应对航摄区域进行分区,航摄分区应遵循以下原则:①分区界线与图廓线尽量一致;分区内地物景物反差、地貌类型尽量一致。②分区内地形高差一般小于1/4H相,当航摄比例尺大于1/7000时,应小于1/6H相。③应考虑飞机的侧方和前方的安全距离及安全高度。④航线敷设时尽量保证东西方直飞;首末航线应布设于测区边界上或边界外旁向覆盖超出界线一般不少于像幅的50%;航向两端应超出测区各不少于一条基线。
2.4 像控点布设及相控点测量
低空无人机航空摄影与传统航空摄影相比,无人机航摄有IMU、DGPS的辅助,能够提供高精度的差分POS数据,精确曝光时的坐标位置。像控点布设可适当放宽,但应避免像主点落水,在遇到航摄区域凹凸拐点时应根据地形条件布设平高点,当有构架航线时应适当减少相控点数量。
像控点的施测包括平面控制测量和高程控制测量,控制测量数据应在等级控制网基础上分级布设,平面控制网可采用GNSS静态相对定位法、GPS-RTK法。高程控制点测量可采用GPS水准高程拟合法和水准测量法。
2.5 航摄实施与数据预处理
航摄实施前,应进行设备的安装调试,主要包括飞行平台的组装、任务荷载设备、动力系统、地面监控系统的检查调试。检查调试完成,导入设计好的航线数据后进行航摄作业。作业期间,作业人员应实时监控航摄系统。
航摄作业完成,传输存储航摄数据,并对航摄数据质量检查处理。航空摄影质量检查包括航摄过程质量和航摄成果质量控制检查。飞行质量检查主要内容包括倾斜角、旋偏角、航线弯曲度、重叠度等。影像质量检查主要包括影像色调是否均匀、反差是否适中、色彩饱和度及清晰度能否满足要求。数据处理前应对影像进行辐射纠正和畸变纠正,对影像进行匀光调色处理。
2.6 航带处理与空三加密
航空摄影飞控系统记录的是每张航摄照片的空间大地坐标数据(B,L,H)和姿态数据,将其转换为航摄影像的物方坐标,通过影像中心偏转角β将航摄照片按航带分带计算完成后,利用共线方程计算相应的地面坐标,得到每张影像视场范围FOV,根据FOV计算像对重叠度,根据重叠度确定像对对应关系构建航测区域网。
现阶段无人机航摄主要采用的是GNSS/POS辅助空中三角测量解算,该方法的优点在于机载POS系统能直接获取每张航摄相片的外方位元素,能大幅度减少地面控制点误差造成区域网平差的影响。但无人机容易受到气流的影响,POS数据的误差会影响网平差的精度,所以适当增加重叠度可提高同名像点的匹配数量从而提高解算精度[2]。
根据无人机航空摄影的讨论,影响空中三角测量精度的主要因素包括控制点精度、航摄像片分辨率、平差解算精度以及测量精度等四个方面,因此应保证像控点的高精度和可靠性,选择合适的平差方法可避免像控点的测量粗差传递到空三解算中。另外,影像分辨率与像元大小、航摄高度相关,降低航摄高度有利于空三精度的提高。
3 航空摄影测绘产品的生产
在矿山修复治理方面,线划图尤为重要,传统的测量手段生产效率低、作业难度大、生产成本高、测绘产品精度低等因素制约矿山地形图的生产,低空无人机摄影测量和EPS三维测图以快速灵活、高效高质量的优点提高矿山地形图的生产。其主要技术流程包括数字高程模型和数字正射影像图的生成、内业采编、外业调绘和修补测、成果输出和精度评定等四个过程。
4 工程案例分析
4.1 航摄区域概况
项目位于贵州省安顺市某矿区,航摄面积约1KM2,地势由西北向东南倾斜,南北长约1KM,东西宽约0.9KM。测区内最高海拔1509米,最低海拔1409米,高差约100米,适合采用无人机航摄作业。飞马D200无人机航摄系统主要参数见表1、表2。

表1 飞马D200无人机主要参数表

表2 飞马D200无人机荷载模块参数表
4.2 航摄参数设计和航摄实施
根据航摄区域数据和航摄设备设计航摄参数。测区面积小,地形情况良好,飞马D200无人机航摄系统具有高精度IMU惯导系统,可获取高精度POS数据,测区布设10个像控点,2个检查点。航摄基准面1459m,飞行高度340m,航向重叠80%,旁向重叠70%,预计地面平均分辨率为6.5cm。
测区内有城市E级控制点,采用网络RTK采集相控点坐标数据,保证测回间平面坐标分量较差不超过2cm,垂直坐标分量较差不超3cm,取10测回结果平均值作最终观测成果。
4.3 数据处理
空三加密解算结果显示基本定向点平面残差1.03cm,高程残差0.8cm;检查点平面残差4.25cm,高程残差2.1cm,满足《低空数字摄影测量规范CH/Z 3003-2010》规范要求。空中三角测量质量报告见图1。
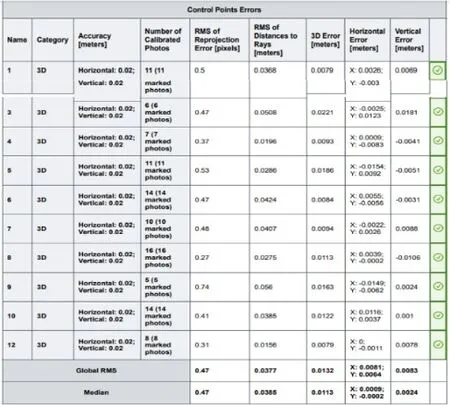
图1 相控点空中三角测量解算精度表
将解算完成的倾斜三维模型导入北京清华三维EPS成图软件,按照国家1:1000地形图成图要求完成线划图的矢量化工作。矢量化数据成果见图2。

图2 矢量化地形图数据采集图
按规范要求完成全测区地形图矢量化工作,对内业无法判读的区域进行外业调绘补判。最后进行修改整饰、检查完成测区1:1000数字正射影像图的成图工作。
经野外采集特征点与模型特征点坐标对比,平面点点位中误差为0.107m,高程中误差为0.09m,满足《基础地理信息数字成果CH/T 9008.1-2010》1:1000地形图平面点位中误差0.6m;高程中误差0.5m的规范要求。
5 结论
文章对无人机航空摄影测量技术的阐述,采用飞马D200无人机在矿山地形图中测量中的运用可以得出低空无人机航空摄影测量配合三维测图软件能高效高质量的完成矿山大比例数字线划图的生产。在实际的航空摄影生产作业中应充考虑测区地形、地貌情况选择合适的无人机航摄系统,相控点均匀布设,增加航摄重叠度等措施有利于提高空三加密精度。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14 03:10:40
小哥白尼(神奇星球)(2021年12期)2021-03-08 09:22:56
河北地质(2021年4期)2021-03-08 01:59:14
中国铁道科学(2019年5期)2019-10-19 07:55:14
航空知识(2019年1期)2019-01-11 01:34:48
测绘通报(2018年10期)2018-11-02 10:07:28
环球飞行(2018年7期)2018-06-27 07:25:52
太空探索(2016年5期)2016-07-12 15:17:58
太空探索(2016年6期)2016-07-10 12:09:06
中国房地产业(2016年9期)2016-03-01 01:26:46
