关于深水区域油气勘探的地形勘测方式探究
2021-06-29 02:08陈超
科学技术创新 2021年17期
陈超
(中海石油技术检测有限公司,天津300000)
深海油气勘探面对的自然情况非常复杂,会受到海洋的流速、水位变化因素、海底复杂的地形、以及这些情况的各种交织影响,在进行实地勘探时,会投入大量的人力物力和财力,因此在勘探过程中最为关键的是提高深海油气勘探成功率,也就是要对基础资料获得的技术能力,其中最关键的是水深地形数据的获得,这个是勘探资料获得与处理的基础数据。当前深海勘探技术主要有三种,而且每种技术都有自身的特点,各自的原理,分析他们对数据获得的原理,获得结果的质量以及投入的成本等方面,挖掘他们的长处,以此更好的在深海油气勘探中投入使用,确保在深海勘探过程中不但能有效获得高精度的数据,同时达到更加经济有效的方式获得并实施。
1 深海地形勘测三种主要方法
1.1 船载多波束系统深海勘测。多波束系统的运转原理是利用声波技术和接收换能器阵实施声波广角度定向发出、收集,声波在水下来回传播的时间和声速的乘积计算获得长短,以此得到水的深度。其中多波束声纳是通过窄带的法向反射形成的一种已校正高频声波,深水在10~30kHz时,频率会在10~300kHz范围内。船载多波束系统深海勘测就是在船上装有多波束声纳系统,并且多波束声纳系统会从海面上对海底进行扫测,扫测的过程中会形成和航向垂直的垂面中条幅式高密度水深数据,这样就能迅速测出沿航线某一大小条带中的水深大小。船载多波束系统深海勘测的优点是测量速度迅速、测量区域广而且精度高等优点。测量精度与海水的深度有直接的相关性,当时水深越深,误差就会越大,精度就会变得越低。其次是分辨率,这与沿声信号两轴方向的波束宽度相关,通常水变深或波束倾斜大,声穿透面积更大,空间分辨率反而变得更低。因此测量精度和分辨率就成为权衡测深系统的关键性指标。
1.2 自主式无人无缆水下航行机器人(AUV)勘探。自主式无人无缆水下航行机器人(AUV)是一种配备了能源动力装置的设备,不需要人驾驶和缆,能够自己在水下自主航行。该设备装置有光学摄像系统、多波束系统、浅地层剖面仪和侧扫声纳等装备,在勘测过程中能够从水面上接收各种指令,包括水下航向的变化、水的进入深度和各种数据收集等方面的命令,因此在海底勘测过程中能实现录像拍摄和海底搜索勘测等多项任务。相比船载多波束系统深海勘测,自主式无人无缆水下航行机器人(AUV)勘探无需水面工作船跟随,作业费用更低,而且AUV上的多波束测量设备和船载多波束原理一样,不同的是船载多波束系统测得水深是实际大小,而AUV是多波束测量的和AUV两者一起的深度。AUV因为可以自由航行,载荷的多波束测量设备可以和海底保持一个固定的相对高度,能有效的接近目标,利于深测目标误差的大大减小,也更加有利于获得高质量高分辨率的深水地形数据。AUV存在不足的是投入比较大,自身需要携带能量密度大的能源,设备要轻巧,结构要紧凑。
1.3 三维地震勘探技术。三维地震勘探技术是根据设计要求在地上铺放两组测线相互垂直的测线,顺着测线采取地震勘探施工,使用面线接受方式获得地层反射到地上的地震波数据资料,然后利用计算机进行处理获取三维数据体。地质工作者按照工程需要获得地质数据,并得到有关三维可视图、断裂分布图、构造图、剖面图和沉积相图等图形。该技术是一项集地质专业、数学领域、物理专业和计算机专业等综合性技术,和船载多波束系统相比,两者都应用了水下声学原理,但是物理原理差别很大。三维地震勘探是通过宽带的几乎垂直的入射反射方式来探查地层构造,但是获得的数据集也能对水深计算出来,其具体提取过程是先进行海底反射波拾取规则设置,然后在地震数据集里面获取深海地底初到波的往返反射时间和坐标,利用1500米每秒的均速给予时深改变获得水深数据信息,该过程不会出现另外的误差修正,获得的便是一个相对尺度,并不是一个绝对尺度种的水深,会存在一个系统误差,水深的相对精度还算高,三维地震勘探技术是当前高精度的探测海底复杂多变的地质环境构造的重要技术,并成为深海油气勘探的重要方式。
2 三种测量方式的应用分析
在实际的应用中选择的是渤海的某一区域,利用三种方法测量原理进行勘测水深,并从数据分辨率、精度进行分析评价,挖掘各自的优点和缺点。
2.1 三种测量中数据的分辨率。分辨率的高低和数据密度成正比。将三种方法应用在渤海的某一区域勘测,各种分辨率如下,如图1船载多波束系统深海勘测。
从图1可以看出,船载多波束系统深海勘测数据密度在620米时密度要比在1800米时水深密度要大,水深越深,分辨率越低,这符合船载多波束系统测量的原理,分辨率主要和水深相关。接下来利用三维地震勘探技术进行勘测,如图2三维地震勘探所有水深密度。
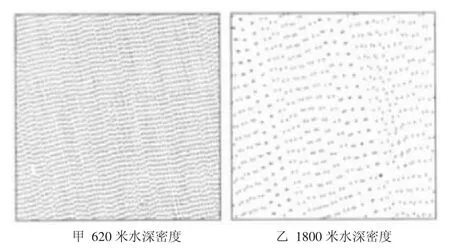
图1 船载多波束系统深海勘测
从图2可以看出,三维地震勘探技术下所有水深密度保持不变,平行间距是12.6m,垂直间距是26m,那么间距是12.6 mX26m。地震数据的分辨率和水深没有相关性,保持着一个固定值。接下来利用自主式无人无缆水下航行机器人(AUV)勘探,如图3自主式无人无缆水下航行机器人勘探的水深。

图2 三维地震勘探所有水深密度
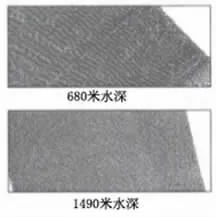
图3 自主式无人无缆水下航行机器人勘探的水深
从图3可以看出,自主式无人无缆水下航行机器人勘探在不同水深下密度基本保持一样。三种方式在渤海的某一区域勘测测量下,海底的水深是1150~1800m,地形非常复杂,而且有非常丰富的微地形特点,尤其是海底峡谷明显,海底地形模型网格基本上是20m。从以上三图可以看出,自主式无人无缆水下航行机器人勘探下数据密度要大于另外两种方法所测出来的密度,同时也说明其分辨率更高。但是从地形的实际表达来看,自主式无人无缆水下航行机器人(AUV)勘探可以清晰地展现海底丰富多样的微地形特点,船载多波束系统深海勘测对主要地形也有了大概展示,但是海底峡谷中的微地形特没有显示出来。三维地震勘探技术下通过一定的处理与精细修改,海底峡谷中的微地形特有了一定显示,总体而言在这个深入下自主式无人无缆水下航行机器人(AUV)勘探分辨率要好于三维地震勘探技术、船载多波束系统。但是在不同深度下,多波束分辨率优于三维地震数据这是一个复杂的问题,而有研究显示在水深小于500m,多波束分辨率要好于地震数据,当大于1000m时地震数据就没有多波束分辨率好了。
2.2 三种测量中数据的精度。三种测量中数据的精度从原理上来看,自主式无人无缆水下航行机器人(AUV)勘探精度要大于船载多波束系统、三维地震勘探技术,船载多波束系统绝对精度要大于三维地震勘探技术,但是经过精细处理的三维地震勘探技术的地震数据水深向AU V数据靠近,而船载多波束系统水深数据比AUV数据多波束误差要大一些。也就是说明在水深超过1000m时,通过精细修改的三维地震勘探技术的数据绝对测量精度要好于船载多波束系统的精度,但是没有精细修改的绝对精度并不高。那么为了深入探究三维地震勘探技术,船载多波束系统的精度,我们选择渤海水深在560~670m的地势平坦的微地形特点不显著的进行对比。而且利用精细修改的船载多波束系统的数据、三维地震勘探技术数据和AUV数据进行对比减去,从而得到和AUV数据的误差,从其研究对比发现,船载多波束系统的数据对比误差是0.3 ~2.7 m,误差平均值在1.5 m,三维地震勘探技术数据的对比误差是3.2 ~5.5 m,误差平均值在4.5 m,这就说明在水深560~670m的地势平坦的微地形特点区域船载多波束系统的精度要好于三维地震勘探技术数据测量精度。从而也说明船载多波束系统的水深测量精度和水深关系很大,当水加深后,误差就会变大,比三维地震勘探技术要明显的是精确度和绝对测量水深方面。也可以这样说,三维地震勘探技术的数据不经过精细处理,绝对精度在各种水深环境下都要小于船载多波束系统的精度。
3 结论
从以上应用探究来看,自主式无人无缆水下航行机器人(AUV)勘探在深海测量精度和分辨率是最高的测量方法,但是该方法有一个比较大的缺点,测量费用高,并且相对效率低,只是船载多波束系统的水深测量效率的十分之一,无法有效大规模应用测量。船载多波束系统虽然没有自主式无人无缆水下航行机器人(AUV)勘探在深海测量精度和分辨率那么高,但是覆盖率宽,能灵活测量,能够在深水海域快速大面积的测量,及时提供详尽的海底地形数据。三维地震勘探技术数据绝对水深精度不高,但是经过数据处理和精细的修改后还是有非常高的使用价值。因此我们无论采取哪种方法,都应该根据所要探测海底的不同情况采取不同的勘探方式。即使自主式无人无缆水下航行机器人(AUV)勘探测量费用高,相对效率低,但是能够对海底地貌进行详细的勘探,所以我们要尽量利用每种方法的优点,让其发挥最大的价值。
猜你喜欢
信息通信技术(2022年2期)2022-05-31
城市勘测(2022年2期)2022-05-09
房地产导刊(2022年4期)2022-04-19
资源信息与工程(2021年5期)2022-01-15
建材发展导向(2021年13期)2021-07-28
成都信息工程大学学报(2021年6期)2021-02-12
数字海洋与水下攻防(2020年6期)2020-12-25
舰船科学技术(2020年3期)2020-04-22
小学生作文选刊·中高年级版(2017年10期)2017-11-07
表面工程与再制造(2014年2期)2014-02-27