
移动机器人热感避障探测仪
2021-06-28 19:10董琦祖传业韩冬冬
电脑知识与技术 2021年10期
董琦 祖传业 韩冬冬
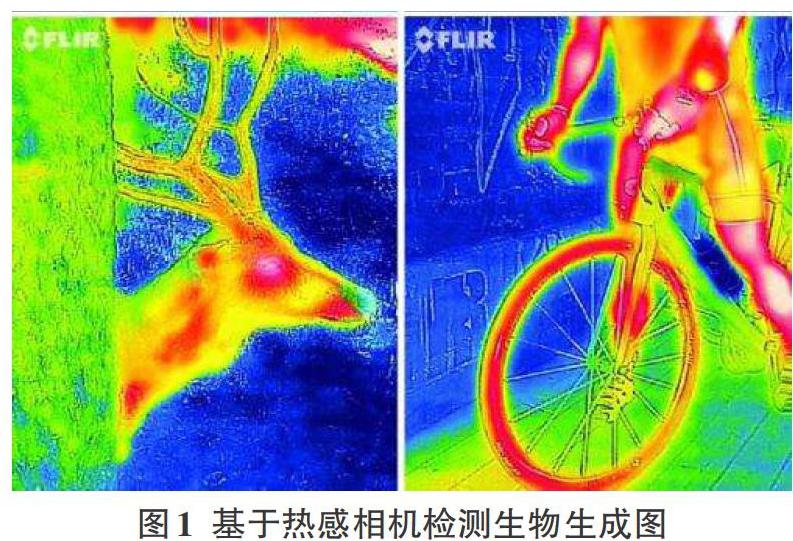
摘要:近年来移动机器人发展迅速,应运而生的就是机器人的自主避障技术,是一个学习的过程,应用在移动机器人的避障传感器多种多样,超声波传感器、激光测距雷达、深度摄像头、视觉传感器等来辅助机器人的工作。但是用热感传感器来进行避障领域研究还是比较少,利用热感探测器将红外辐射转换成电信号,进行电路信号可变分析。国内外对于热感避障探测仪的研究越来越重视,主要应用在机器自主识别上。本次课题主要是针对热感避障探测仪在移动机器人运动生物检测上的应用配置。
关键词:移动机器人;热感避障
中图分类号:TP3 文献标识码:A
文章编号:1009-3044(2021)10-0194-03
1引言
近些年来,机器人的运用越来越普遍,涉及自动驾驶、救援、货物运送等领域。[1] 机器人的这种智能化科技的产生,可以说是机械设计、计算机领域、通信、电路运用、等领域多门工学学科共同发展的一个综合性的成果,也是科技进步的产物,同时,为社会经济发展产生了一个重大影响的一门科学技术,如果能将移动机器人和热感避障探测仪相结合,那将会是一个非常实用的应用。由于移动机器人和热感避障探测仪的相关度不高,所以本文主要从以下几个方面研究如何在移动机器人上部署热感避障探测仪及其应用。
2目标设定
将热感避障探测仪部署在移动机器人的难点主要体现在机器人结构复杂,如何才能将机器人和热感避障探测仪相结合并且稳定运行。自主移动化的机器人是一类拥有多电子控制机械关节,集成驱动器,广自由度的特点,但是自由度的设计、各关节的活动空间范围大小、驱动器的驱动能力大小、系统耗能都会有可能成为机器人在外观、行动能力、行走方式、感应灵活度、热感避障探测仪正常工作的重要影响因素。
我们所研究的这款不但能满足能将移动机器人和热感避障探测仪相结合,还能让热感避障探测仪在机器人上稳定工作。因此,我们需要根据机器人的关节运动特点、机械自由度、机器人高度等主要影响因素进行数据接口与探测仪系统链接。要想设计出这款探测仪的难度可想而知。
2.1移动机器人的导航系统与探测仪系统的综合配置
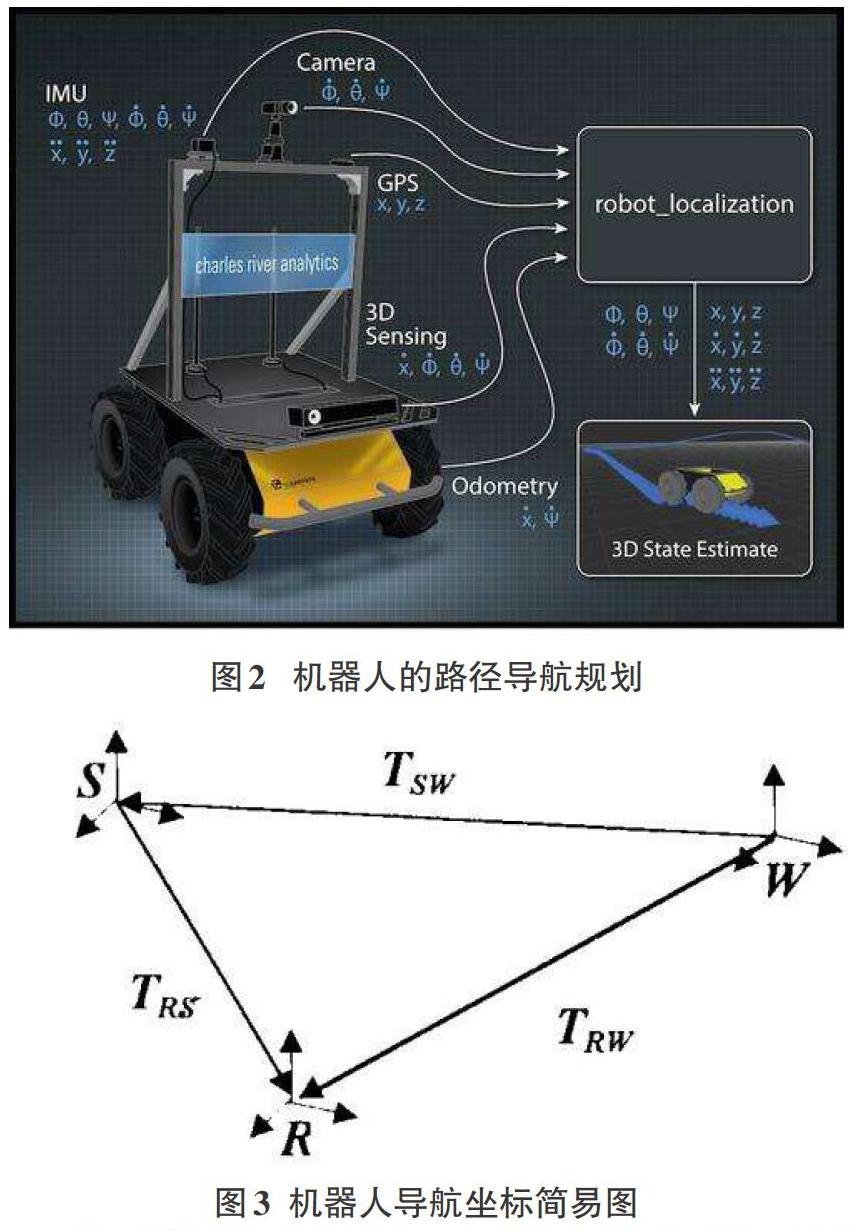
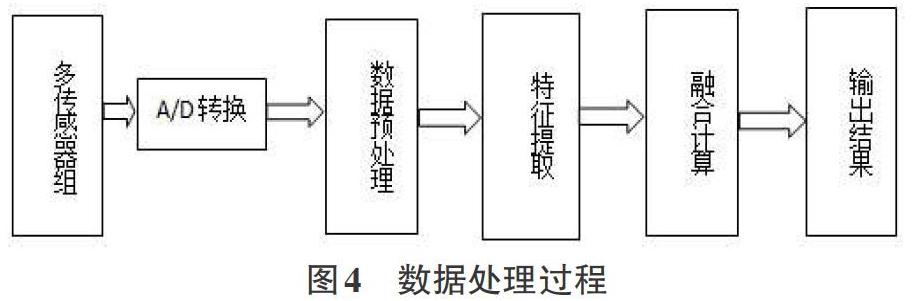
机器人的移动是从机器人系统的中央处理器控制相关任务进程,发出位置坐标变化请求时开始。[2]机器人的特殊数字化导航系统通常是通过系统中央微处理器拟定行程规划或路线轨迹,就接命令从而开始执行位置变化请求指令。行程规划需考虑到可选路径、障碍物在机器人系统坐标图中的坐标位置、机器人能做到的功能以及任何相关的任务目标。(例如,对于物流仓库里的货物递送机器人,递送位置非常关键。就需要合理规划路线)行程计划被馈入系统控制器,经系统处理器处理生成传动信号和方向配置文件用于导航方向控制。这些生成的配置文件经过控制器行程规划控制舵机执行相应的动作。该运动通常由探测仪的辅助检测系统进行监控,各检测系统均产生反馈信号;反馈的控制器中央处理电路信号,通过A/D转换产生新的行程规划指令。这就需要探测仪将数据处理输出信号作为馈入控制器的输入信号,由机器人的导航系统进行执行这些输出数据信息指令。
开发探测仪系统的关键在于充分其功能,特别要重视其工作主要内容和功能限制。各项功能通常都有明确界定且易于执行的指令内容,但也会提出一些需要加以处理的具有更高要求的限定。这是一个反复测试的过程,即识别和检测,快速处理进程的限制同时,也会带来新的优化。对于探测仪应当更好的数据通信接口用于与移动机器人系统的链接,更多的是在步行机器人,和轮式机器人身上。而探测仪应尽可能小,这样才能部署到机器人上。
3机器人探测仪位置的确定
人类在工作时,是利用自己的感觉器官反馈信号到大脑,大脑控制身体各部分肌肉的力量大小在自己骨骼和肌腱的承受能力范围内每个人的承受能力不同。同样,机器人也是如此,不同的机器人采用不同类型的力和力矩传感器来模拟人的这种力度大小检测,在通过压力传感器检测构件的受力情况,确保各个构件在使用过程中能够保持正常,从而保护机器人的机械构件不被破坏,是因为机器人是一个精度化灵敏度高的机械,为了防止机器人和周围环境物体的碰撞,需要采用压力传感器、距离传感器、触觉传感器等来避免相互碰撞。这对探测仪系统的要求就有所提高与要与这几类传感器相互链接。机器人被设计的目的是服务人类,目的为了保护人类以免其害,解决人类所面临的危险处境等。在实际应用中会出现各种各样的情况,可能会因为传感器安装高度不合理或者各类传感器数量密度低等原因导致探测仪无法准确獲得周围环境的数字信息,无法做出正确的信号处理,从而影响机器人整体的控制,机器人可能做出不可预知的动作,对周围环境造成破坏。探测仪的传感器需要根据机器人特点全方位判断传感器的安装合理性,不能单纯仅仅做信号处理,需根据工作环境的特点研究最恰当的避障传感器在机器人各个部位的分配方式。
3.1探测仪的部件配置
对于探测仪首要部件就是传感器的选择,其次就是与电路相关的硬件配置,传感器精度问题是关键的问题,对于机器人来说传感器不仅需要精确度高,而且可靠性稳定性要好。机器人在探测感知系统的辅助下,自主完成人类指定的工作指令,不需要再次人为干预其行动,传感器就是类似人的各种器官,传感器的精度决定机器人的灵敏程度以及工作内容的作业质量,传感器工作不稳定或者可靠性低,可能引起机器人出现无可预知的故障,轻者致使工作不能正常执行,严重造成生命安全事故。因此传感器的重要性可想而知,可靠性和稳定性是机器人探测仪系统必不可少的重要条件。其次系统的抗干扰能力,由于机器人往往工作在未知的环境中,并不是在实验室那种比较理想的环境中运行,因此要求系统整体具有抗电波干扰,振动、潮湿、污渍,等恶劣的环境下干扰能力,要保证探测仪在电路硬件系统中的正常工作。针对性的设计处在特定环境下的机器人,对探测仪的体积和安装方向就有了特定的要求。在进行电路设计保证满足电路设计基本要求再满足应用电路需求。对于pcb板上的主要硬件CPU芯片选择至关重要,需要选择一款适合探测仪并且适合启动的芯片。
4结构设计
对于探测仪的功能设计,主要是由两部分组成的:一部分是用于检测传感器状态部分,另一部分是用于传感器的扫描数据处理以及与系统处理器的对接部分。由于传感器部分主要用于检测环境变量,对于探测仪可以分开进行设计,主体部分主要由电路设计与单电机控制板构成,进行电信号处理。对于外部检测部分主要由传感器组成,用于环境变量检测以及数据传送到数据处理中心。
4.1布置多样性
多样性对机器人的研究来说是关键的。对于探测仪而言也是如此,对于移动机器人不可能仅有一种传感器来为机器人进行环境的查看,需要各类传感器进行一起工作来完成机器人的基本功能,对于探测仪而言不单单针对一类传感器设计,这样就造成资源的浪费,本身机器人就需要大量的部件组成,对于探测仪的电路结构设计要能兼容各类传感器的链接进行数据传输,此探测仪的应用将移动机器人的上热感传感器与其他传感器的使用效率上大大增加。
4.2电路驱动方案
硬件电路设计是进行探测仪设计的最底层的设计,是整个探测仪中核心的部分。它设计的好坏决定着整个系统的平稳定性和可拓展性。本次设计的探测器系统硬件控制电路主要包括两个部分,一部分是传感器的检测电路,包括:谐波振荡电路、信号放大电路和电磁检测线圈、峰值检波电路,DAC转换器、stm3f407微处理器、LED显示电路、 声音警报电路及开关电源总路等。
STM32是基于ARM? Cortex? M 处理器内核的 32位闪存微控制器,,STM32单片机程序都是模块化的,为MCU开辟了一个全新的自由开发空间接口相对简单些,因为它自身带好多功能,工作速度也快。STM32 MCU及时性、融通性能高、数字信号处理、功耗低于一身,同时是一种高度集成的微型化芯片和可开发的功能全面的特点。stm32外设共有12条DMA信息通道、一个CRC计算单元, stm32微控器比stc51芯片功能更强,支持96位唯一标识码。正是由于stm32芯片的这些优势,[4]作为智能化芯片对于系统数据处理以及稳定性有着很大的帮助,并且对于数据处理输出还能更好地与机器人系统对接。这也是为何选择新型stm32芯片的原因。
4.3探测仪的稳定性和精准性
设计此款探测仪对机器人的自主移动有着非常重要的作用,探测仪正常工作是机器人运动的前提,探测仪不稳定将造成移动机器人的不稳定工作与运行,其次是传感器的精准度问题,探测仪的数据来源就是来源自传感器,传感器不精准对于探测仪的精准数据输出是一个严峻的考验。传感器稳定性表示传感器在一个较长的时间内检测精度能维持在其执行标准变化的有效范围以内。理论状态下,传感器的特性参数都不随时间变化。但实际上,随着产品的长期应用,传感器是电子化产品,其自身特性会因为环境的影响而发生轻微改变。这是因为敏感元件或构成传感器的部件的应用造成的电子产品氧化,其特性会随时间发生变化,进而影响整个系统的稳定性。为避免此类问题的产生,需选择产品质量优质的产品,定期维护探测仪的电子元器件。
移动机器人和人类有着类似点,人类的身体是由我们的皮肤作为保护,当我们的身体接触到地面时,皮肤的组织可以起到一定的减震作用,避免的身体内部受到严重伤害。因此给探测仪配备恰当的电子减震器也可以保证探测仪的稳定性。经过多番查询资料得到,谐波减震器有着良好的机器人应用性能,这样一来,设计的此款探测仪就能很好地和机器人本身有机结合成一个整体。
5探测仪的设计对机器人产业的影响
机器人这一新兴科技,这个时代是属于它幼年时代,它的发展前景广阔,在中国,特别在一线城市,机器人相关的智能化企业,也是特别的多都在致力于机器人技术的研发,但是都是属于探索前进的进程中,对与特定环境下的机器人避障已经能做到很好,但是对于常规环境下的机器人避障还都是处在一个中等偏上的水平,科技化的企业在当今社会有着很大发展潜力,此款探测仪的研究将推动移动式机器人的发展,在移动化机器人避障领域将有着重要作用,探测仪能很好综合各类传感器的使用,重点突出热感避障下的应用,很好的应用在自主移动式机器人上,通过合理的技术修改也可以作为固定式机器人上的应用装备(汽车产业的机械臂组装,产品流水线的工作机器人),帮助企业研发新型移动化机器人。如今,我们的生活中出行机器人已经应用在很多领域,这也对机器人行业的发展提供了商机,有些机器人制造业厂家看到了机器人时代的来临,早早开始默默为机器人制造业改型做准备,作为制造业中重要的一个环节,机器人制造业在生产生活中发挥着重要作用,极大地减少人工体力支出,生活中也可以辅助人们操作作业,机器人的优势正在一点点展现在人们的眼前,这也吸引了越来越多的人关注机器人产业。如今智能化机器人高速发展,机器人制造业借助这个时代带来的机遇,快速、准确的实现机器人产业的更新换代,促进了机器人产业的快速发展。
6 结语
本次课题的设计主要是针对热感避障探测仪在自主化运动机器人上应用的配置。将此设计探测仪配置在机器人身上,可以更好地辅助机器人的自主运动能力。根据对传感器,物理电路的研究,以及机器人运动的需要研究,我们确定所需要的热感传感器、CPU选择,电路设计方案,减震器的选择,以及机器人对探测仪位置要求进行确定选择,并对其进行结构分析。
参考文献:
[1] 潘光良.移动机器人避障研究[J].智能机器人,2019(2):37-39.
[2] 徐源正.多移动机器人系统中路径规划算法的研究[D].成都:电子科技大学,2019.
[3] 丁晟辉.地面多移动机器人协同避障与路径规划技术[D].南京:南京航空航天大学,2019.
[4] 吕雪,牛海侠.采用模糊免疫PID控制的移动机器人避障误差仿真研究[J].井冈山大学学报(自然科学版),2019,40(6):71-75.
[5] 魏彤,龙琛.基于改进遗传算法的移动机器人路径规划[J].北京航空航天大学学报,2020,46(4):703-711.
[6] 侯远韶.移动机器人避障运动关键技术分析[J].科技资讯,2019,17(24):4-5.
[7] 陈淑玲,陈莺,涂浩.基于模糊控制的機器人避障研究[J].湖北农机化,2019(13):94-95.
[8] 李艳,周莹亮,李可可.基于STM32的移动机器人目标自动跟随系统设计[J].电子器件,2019,42(2):403-410.
[9] 刘洋.基于多传感器信息融合的机器人避障系统的研究与实现[D].武汉:武汉理工大学,2019.
[10] 黄振.移动机器人避障行为膜控制器设计与实现[D].成都:西南交通大学,2019.
【通联编辑:朱宝贵】
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
科教新报(2022年12期)2022-05-23
空间科学学报(2021年4期)2021-08-30
中国洗涤用品工业(2020年10期)2020-11-25
中国军转民(2018年1期)2018-06-08
中国军转民(2018年3期)2018-06-08
制造技术与机床(2017年3期)2017-06-23
纺织导报(2016年12期)2017-01-06
中国煤炭(2016年9期)2016-06-15
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
