
面向河长制的河湖“乱占”现象遥感监测技术研究
2021-06-28 14:52陈苏晋孟令奎
水利信息化 2021年3期
陈苏晋,孟令奎,张 文
(武汉大学遥感信息工程学院,湖北 武汉 430079)
0 引言
随着我国治水主要矛盾的转变,各级河长都需要投入到“清四乱”的工作中,其中,以围湖造田、坑塘养殖为典型代表的“乱占”现象就是河湖治理的难点之一。为加强对河湖水域规划的岸线管理并保护水生态,必须严令禁止以各种手段和名义非法侵占沿线河道、填湖造田、私建坑塘、非法采砂的行为。同时,也需要对岸线水域“乱占”滥用、多占少用、占而不用等突出问题进一步开展清理和专项整治,恢复原有河湖水域规划岸线生态管理功能[1-2]。由于遥感影像具备覆盖范围广、数据量大、时效性强的特点,将遥感监测技术应用于“乱占”问题的检测,能够减少实地调研的人力消耗,助力河长工作[3]。
近年来,遥感技术在水利方面的应用优势逐渐凸显,面向水利应用的分类算法也逐渐趋于成熟。归一化差分水体指数(NDWI)阈值法、支持向量机(SVM)及面向对象等方法,都在基于 GF-1 遥感影像的鄱阳湖水体信息的提取实验中进行了应用尝试[4],神经网络也应用于海水养殖区的识别[5]。运用研究区域光谱、纹理和形状特点显著的优势提取特征向量,能够实现地物目标的精确提取[6]。归一化建筑指数(NDBI)、归一化植被指数(NDVI)和NDWI等特征描述方法,还适用于进行多种地物类别的变化检测[7]。
为此本研究选用 GF-1 卫星 PMS 影像,通过多特征融合的方法提取坑塘养殖和围湖造田 2 种“乱占”对象的特征,使用 SVM 分类器实现目标识别。
1 整体思路
由于围湖造田与坑塘养殖 2 类“乱占”现象差异性较大,故而分别提取 2 类地物的特征,再执行分类,采用因地制宜的方式完成“乱占”识别。
围湖造田区域经历水陆变迁,与水体具备不同的光谱反射特性。由于遥感方法是根据地物呈现的状态进行分类的,在无法进行实地调研的情况下,为避免缺漏,暂且将湖泊范围内的非水体且非建筑区域全部认定为疑似围湖造田区域,包括草地、林地、裸地等。利用NDWI提取影像范围内水体的特性,可以通过逆向选择提取湖泊矢量范围内的非水体区域。由于建筑区域不属于提取目标,故而NDWI偶尔误分建筑和水体的问题,不会对提取造成影响。疑似围湖造田区域在作物生长季(我国大部分地区以 5—10 月为主要代表)有明显的植被覆盖,故而可以利用植被的反射特性作为该区域的特征,运用NDVI或NDBI表示,从而与非水体区域中的建筑物进行区分。综上所述,通过计算NDWI,NDVI或NDBI,能够对疑似围垦、建筑与水体等区域进行划分。
坑塘养殖区域大多为人工修葺的蓄水量较小且形状相对规则的矩形水面,常常呈现集中分布的特点,且排列整齐。砂土、黏土和壤土建塘等修建方式的差异,会导致坑塘具备不同的波谱反射特性,故不适合用波谱特性提取坑塘。但人工建造的坑塘养殖区通常为整齐排列的矩形水面,纹理和几何特征显著。每个坑塘的水域面积小,边界平直,转角接近 90°,一般会有大量尺寸相近的坑塘紧密排列,开阔水域周边的坑塘通常沿岸线分布。由于尺寸原因,大部分坑塘的纹理特征在中分辨率影像中很难辨识,但当使用高空间分辨率遥感影像时,能够较好地反映坑塘的纹理特性。此外,受大气环流的影响,我国大部分地区在冬季易形成西北季风,容易掀起风浪,从而引起强烈的水体对流。为减少风浪对堤坝的冲击,在修建坑塘时常常缩短南北走向的距离,以东西向长,南北向短的矩形为主要形式[8]。
综合考虑上述特征,使用光谱特性提取围湖造田区域特征,使用纹理特性提取坑塘养殖区域特征。
2 面向多特征融合的“乱占”目标识别
根据前期准备阶段收集的“乱占”舆情信息,结合目视判读,选取位于黑龙江省和江苏省的 4 个湖泊作为研究区域,各湖泊所属的区位和面临的“乱占”问题如表 1 所示。
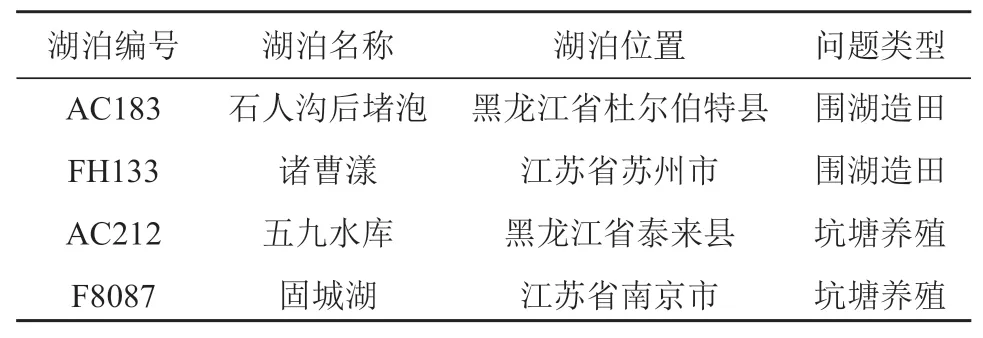
表 1 “乱占”问题研究区域
运用 GF-1 卫星 PMS 影像数据进行“乱占”目标的识别,分别借助光谱和纹理特征提取围湖造田和坑塘养殖 2 类地物。
2.1 遥感影像预处理
将 GF-1 卫星影像投入应用前需要先消除大气辐射和地形起伏等因素对遥感数据造成的辐射和几何误差,因此借助 PIE 遥感图像处理软件按照辐射定标、大气校正、正射校正、影像融合的流程对影像进行预处理操作。
2.2 基于指数法的围湖造田特征提取
NDWI能够有效区分水体和围湖造田区域,而NDBI和NDVI可以对围湖造田区域和以建筑物为主要表现形式之一的不透水表面进行区分[9]。其中:NDWI由绿波段和近红外波段运算得到,NDVI由红波段和近红外波段运算得到,NDBI由近红外波段和中红外波段运算得到。由于 GF-1 卫星影像能够提供蓝、绿、红和近红外 4 个波段,不具备中红外波段,故而选用NDWI和NDVI共同描述围湖造田区域的特征。
在特征提取过程中,本研究采用容许少量错分,但尽量避免缺漏的策略,将草地、林地、耕地及裸地等疑似区域均判断为围湖造田区域,尽最大可能使得所有围湖造田区域均能够被提取出来。
2.3 基于纹理法的坑塘养殖特征提取
灰度共生矩阵(GLCM)在纹理特征提取方面经过大量实验验证具备优良的性能[10],本研究选取以下 4 个特征统计量作为纹理分类依据:1)对比度(Con),反映像素与其邻域像素的亮度对比情况,对比度越大,代表亮度值变化越快;2)角二阶矩(Asm),描述影像纹理的粗糙程度,角二阶矩越大表示纹理的粗糙程度越高;3)相关性(Cor),描述灰度共生矩阵元素在一定方向上的相似程度,相关性越大表示在该方向的相似程度越大;4)逆差矩(Idm),描述影像局部纹理变化的大小,逆差矩越大纹理越规则。
特征提取算法在灰度共生矩阵的基础上,还以方向梯度直方图(HOG)作为补充,构建如图 1 所示的提取流程。
计算 HOG 特征和 GLCM 的 4 个统计量,合并即可得到该影像的纹理特征向量。使用该技术流程进行特征提取,能够有效提升坑塘养殖区域与周围地物的区分度。
2.4 基于监督学习的“乱占”目标识别
由于 SVM 具有抗噪声性能优良、对样本干预需求量相对较少、稳定性好、自动学习效率高等优势,因此选用 SVM 对“乱占”目标执行监督分类。
2.4.1 训练样本选取
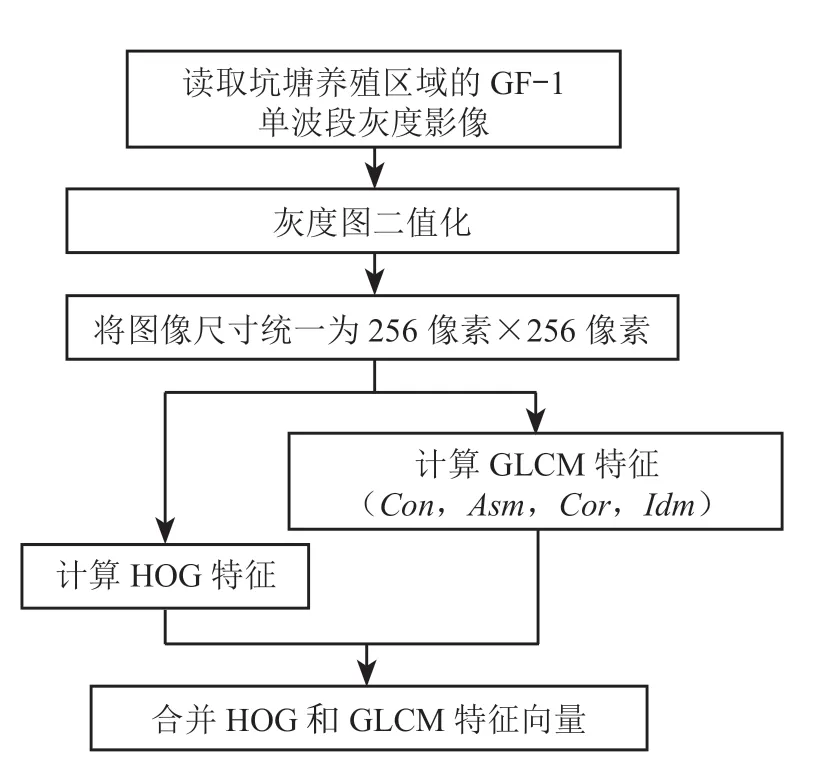
图 1 基于灰度共生矩阵的坑塘养殖特征提取流程
监督分类训练样本的质量将直接影响分类精度。为了能够为计算机自动分类提供足够多信息的训练样本,结合 2019 年全国水体遥感监测数据产品更新的湖泊变化情况记录,以及前期准备工作中对微博平台上“四乱”舆情相关信息的抓取结果,在Google Earth Pro 提供的高分辨率影像基础上进行目视判读,确定目标类别,人工绘制样本区域,利用ArcGIS 裁剪工具完成样本的采集工作。由于 GF-1卫星自 2014 年开始能够提供全年的高分辨率影像,在选取样本时,主要关注 2014—2019 年有典型“乱占”现象的湖泊。
样本采集的具体流程如图 2 所示,各类地物累计采集的样本数量如表 2 所示。
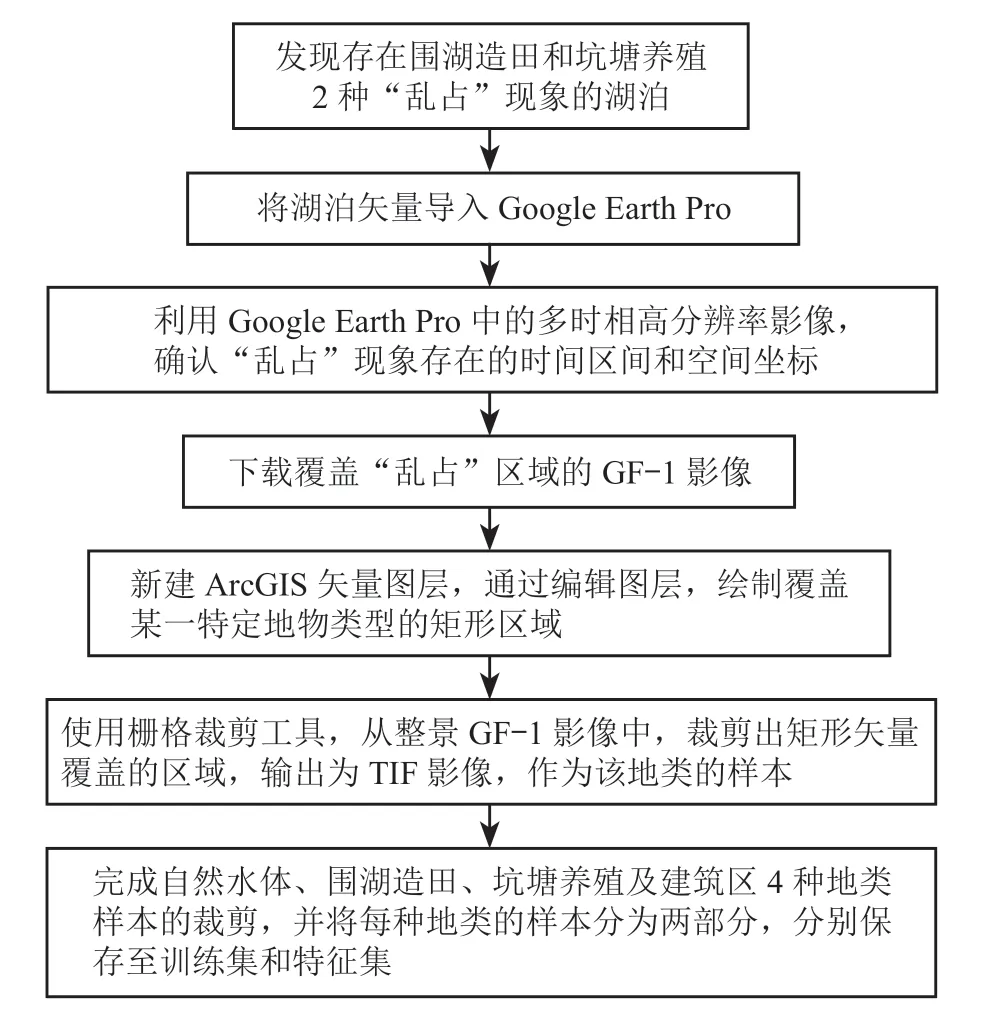
图 2 样本采集流程
2.4.2 “乱占”目标检测
根据围湖造田和坑塘养殖 2 类“乱占”目标特征完成训练样本选择后,可按图 3 所示的流程实现基于监督学习的“乱占”目标识别。
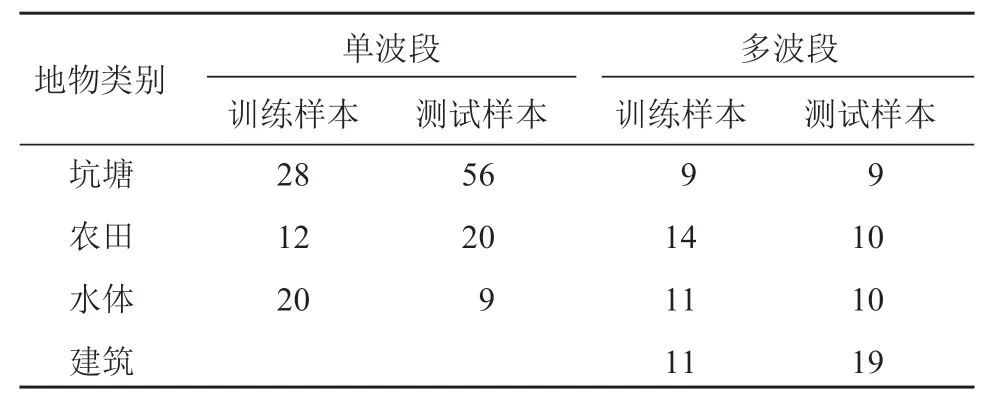
表 2 各类地物样本数量 个
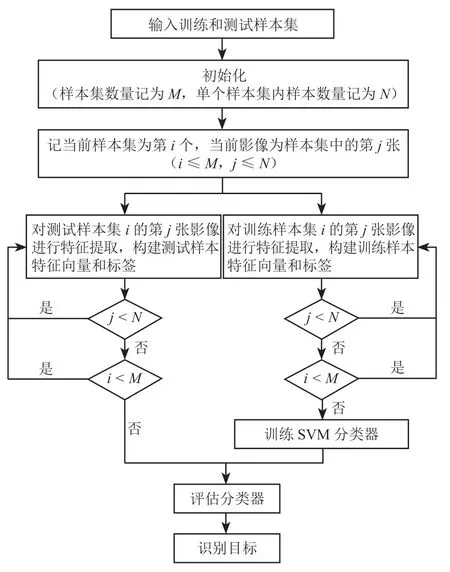
图 3 基于监督学习的“乱占”目标识别流程
使用 SVM 进行“乱占”目标识别的流程如下:
1)初始化。为便于提取特征,首先将所有训练影像大小统一调整至 256 像素×256 像素,然后确定特征向量尺寸,对每一类样本分别初始化特征矩阵。
2)构建训练样本特征向量和标签。首先按照地物类别,对训练集中的样本逐个提取影像的特征向量,更新特征矩阵;接着将图像所属的类别描述记录为该影像的训练标签;最后将训练影像的特征和标签对照添加至特征集和标签集。训练集中的所有影像都需遵循上述流程完成特征提取并添加标签。
3)构建测试样本特征向量和标签。此构建流程与构建训练样本特征向量和标签流程相同。
4)使用选取的各地物类别样本数据集,训练SVM 分类器。
5)使用分类器对测试样本进行预测分类,比较测试数据集的预测结果与样本实际所属的类别,生成混淆矩阵展示分类效果。
6)应用分类器识别未标识目标。输入未标识的影像,使用分类器判断其所属地物类别。
2.5 结果与分析
在特征提取的基础上进行“乱占”目标识别,能够有助于发现更多的“乱占”问题。本研究通过训练的 SVM 分类器,对不同区位或时间的遥感影像中的 2 种“乱占”目标进行分类识别。表 3 为采用裁剪后的小区域进行识别测试的示例,分别展示围湖造田和坑塘养殖目标区域的识别结果,示例中具备典型坑塘和农田特征的目标都能够被成功识别。
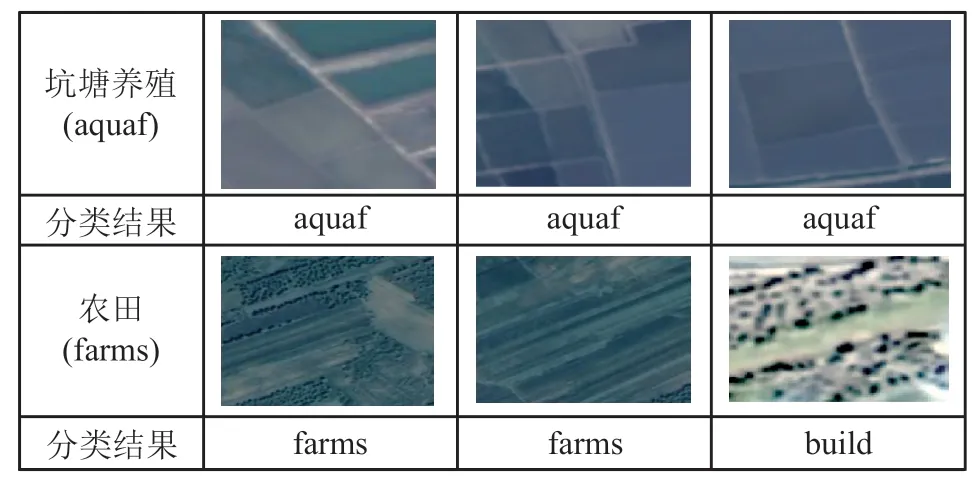
表 3 围湖造田和坑塘养殖识别结果示例
向训练好的分类器中输入待识别的样本,即可预测该样本影像所属的地物类型,最终通过可视化途径输出识别的结果。
企业资源包括有形物质资源和无形的资源,有形的物质资源包括人、财、物等基本物质资源,无形资源包括品牌、社会资本、商誉和技术等无形资源或资产。一个企业具有良好的成长性,就可以高效率地开发和利用已有的资源以及充分挖掘未发现的管理能力。电子商务企业资源成长性的大小可以由这两方面的成长性指标群来测量,有形的资源的成长性是量的增加,如市场占有率的提升、总资产的增加、固定资产的增加、企业员工的增加等;无形的资源的成长性是质的增加,如技术的进步、企业员工素质的提升、社会资本的增加、品牌价值的增加等。
本研究先使用NDVI和NDWI指数法凸显出围湖造田区域的特征,再通过训练 SVM 分类器对水体周边的建筑、农田、坑塘及自然水体进行区分,分类精度如表 4 所示。
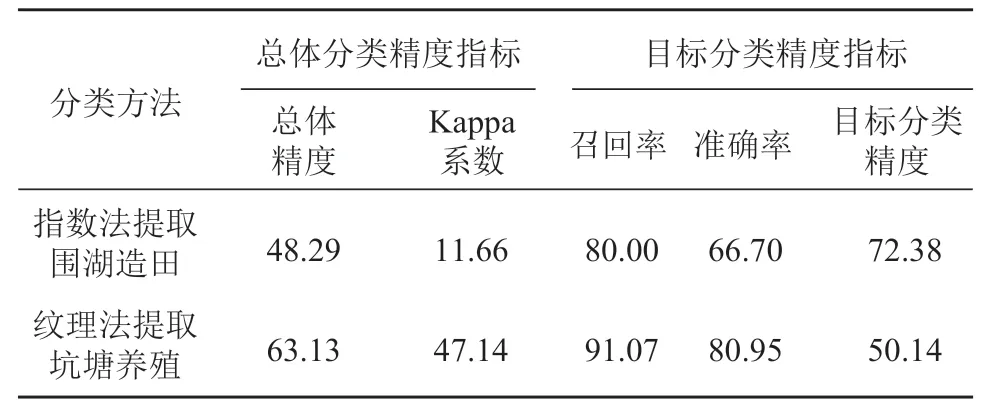
表 4 “乱占”目标分类精度 %
在分类过程中发现,浮水植物密集的自然水体容易与农作物种植区域相混淆。由于水面大量植被的遮挡,该区域水体的反射特性减弱,主要表现为植被的光谱反射特性。
利用指数法进行分类实验时,由于较好地分离了建筑区和水体(含坑塘养殖和自然水体),因此,在利用纹理特征识别坑塘养殖区域时,仅考虑坑塘养殖、围湖造田及自然水体 3 类地物的分类。
当前实验结果显示:围湖造田和坑塘养殖 2 类地物的召回率较高,对 2 种“乱占”目标的提取效果总体良好。但是当前研究区域内获取的样本数量有限,模型的普适性仍有待验证。
2.6 普适性分析
为验证“乱占”识别模型的普适能力,以坑塘养殖区域的识别为例,在大比例尺遥感分类图像高分辨率样本数据集的基础上重新进行筛选,组建能够反映湖泊“乱占”地物特点的扩展样本数据集,进行扩展测试,检验模型推广后的识别精度。该数据集与表 2 所示的基于 GF-1 卫星影像制作的数据集相互独立,扩展数据集中样本仅包含 RGB 波段,但具有相似的空间分辨率,同属于高分辨率遥感对地观测数据。
样本选择主要考虑湖泊管理范围内对应地物类型表现出的特点,具体选择规则如下:
1)坑塘养殖区域大多表现为连续排列的矩形,鲜有分散、独立的不规则形状;
3)水体表面较为平静,部分水面有轻微波纹,罕见大范围明显浪花。
按照选择规则选取得到的各地物类别影像数量如表 5 所示。
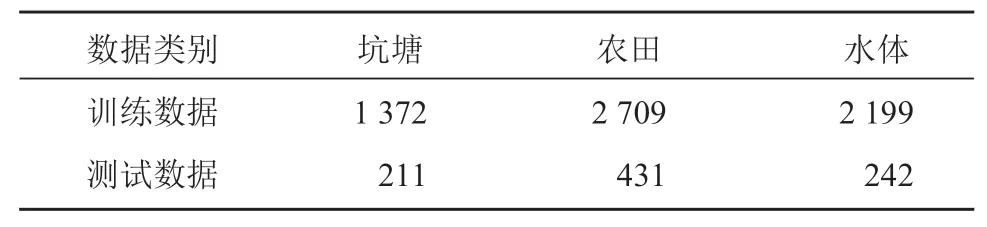
表 5 扩展测试集各类样本数量 个
测试所得的混淆矩阵如表 6 所示,其中:所在行对应的地物类型为测试样本的实际所属类别,所在列对应的地物类型为模型分析得出的判定结果。
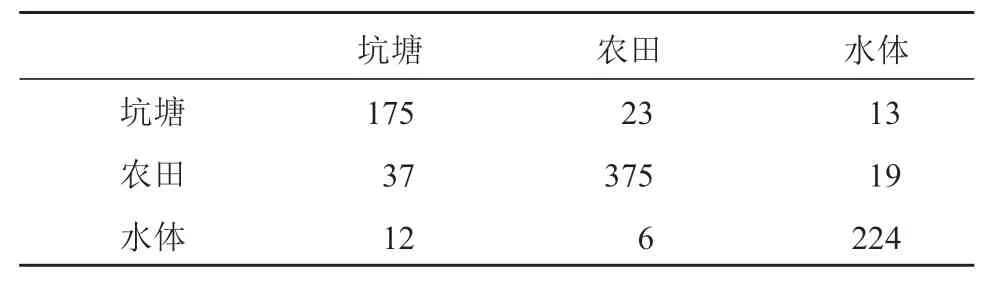
表 6 混淆矩阵 个
综合混淆矩阵与参与测试的样本数量可知,在平衡 3 类地物的样本数量后,该测试对坑塘养殖对象的分类精度为 85.96%,召回率为 82.94%。本研究提出的“乱占”识别模型,在扩展测试中所得的分类精度和召回率均优于 80%,可见能够适用于不同数据集的湖泊“乱占”目标识别,普适性能良好。
3 结语
监督制度的建立是一项系统工程,为推动水利现代化,必须加强水利信息化监管体系的建设[11]。“清四乱”工作是水利信息化监管体系建设的重要组成部分,本研究聚焦围湖造田和坑塘养殖 2 类河湖“乱占”目标的识别,针对两者的特征采取不同的识别策略,致力于为河长监管“清四乱”工作提供技术支持。
实验结果表明:选用高空间分辨率的卫星影像,通过多特征融合的方法执行监督分类,对“乱占”目标进行识别,能够对围湖造田和坑塘养殖2 类研究对象取得较好的提取精度,研究成果可以适用于不同影像数据集中“乱占”目标的识别,为水利信息化监管体系建设提供助力,协助河长发现“四乱”问题,监管“四乱”整改。
后期将继续探究降低本研究运算过程中内存占用的方法,尝试推广至更大范围影像中的“乱占”目标识别,同时优化模型提高分类的精度。
猜你喜欢
建材发展导向(2022年2期)2022-03-08
渔业致富指南(2021年7期)2021-12-06
乡村科技(2021年13期)2021-12-01
环境保护与循环经济(2021年7期)2021-11-02
建材发展导向(2021年14期)2021-08-23
探索科学(学术版)(2021年5期)2021-06-08
科学(2020年4期)2020-11-26
软件(2020年3期)2020-04-20
山东水利(2020年11期)2020-01-06
摄影之友(影像视觉)(2018年12期)2019-01-28
