基于2-UPR/RPS并联机构尺度对工作空间的影响
2021-06-26 04:05马春生马振东尹晓秦米文博
科学技术与工程 2021年15期
马春生, 马振东, 尹晓秦, 米文博
(中北大学机械工程学院, 太原 030051)
并联传动机构的特点是结构稳定、传动性能好,具有较大的承载能力及较高的控制精度[1-2]。可以应用于物料分拣和快递物流行业等此类需要大量重复的机械运动中。分拣机的主要工作是将不同的产品进行分类,工作类型但需要大量重复工作,因此,少自由度并联机构构型及并联机构工作空间的范围才是设计中所主要需求的[3-4]。
刘伟等[5]对3T、2T1R 和2R1T 模式的并联机构进行了构型综合,提出多种构型。许允斗等[6]通过研究2-RPU/UPR并联机构的受力特点和结构特点,搭建实体样机。张伟中等[7]通过分析运动副布置对工作空间的影响,优化了2-PUR-PSR并联机构的空间尺寸。汪满新等[8]分析了3-SPR并联机构不同尺寸下的运动学性能参数,选出了合适的机构参数。李典等[9]通过研究新型2-2PRUR并联机构的运动学和工作空间的优化方法进行了分析,基于遗传算法对该类并联机构的工作空间进行了优化,给出优化后的机构尺寸,为建立样机提供基础。
工作空间是衡量并联机构的一个重要指标,应根据不同的生产实际需求选择合适的并联机构。样机尺寸对机构的工作空间影响较大,同一机构在不同尺寸下的工作空间也不同,工作空间和机构尺寸的关系很多时候并不是简单的线性增长。分析并联机构尺寸参数与工作空间之间的关系,具有重要的实际意义。
少自由度并联机构结构简单、运动性能良好、具有良好的控制精度、响应速度较快。对于产品分拣、包装等各种需要同时进行大规模的重复运动的工作而言非常适合。
1 自由度分析
1.1 机构描述及坐标建立
2-UPR/RPS(U代表虎克铰,P代表移动副,R代表转动副,S代表球面副)并联机构由动平台、定平台、两条UPR支链以及一条RPS支链组成,机构的初始位型如图1所示。
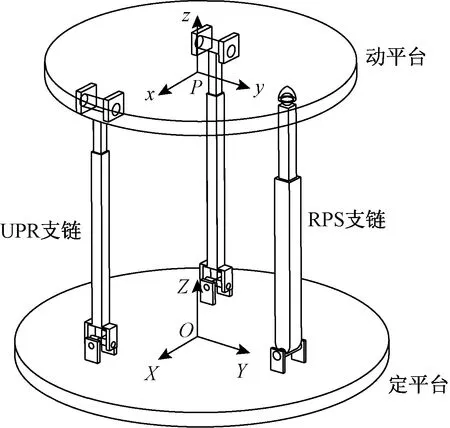
图1 2-UPR/RPS并联机构模型Fig.1 2-UPR/RPS parallel mechanism model
两条UPR分支呈对称分布。如图2所示,在UPR 支链中,虎克铰与定平台分别相连于A1、A2点,转动副与动平台分别连结于B1、B2点,移动副的轴线方向通过U副中心点和R副相连,两个U副中的第一转动轴线共线。动平台上两个转动副的轴线平行。
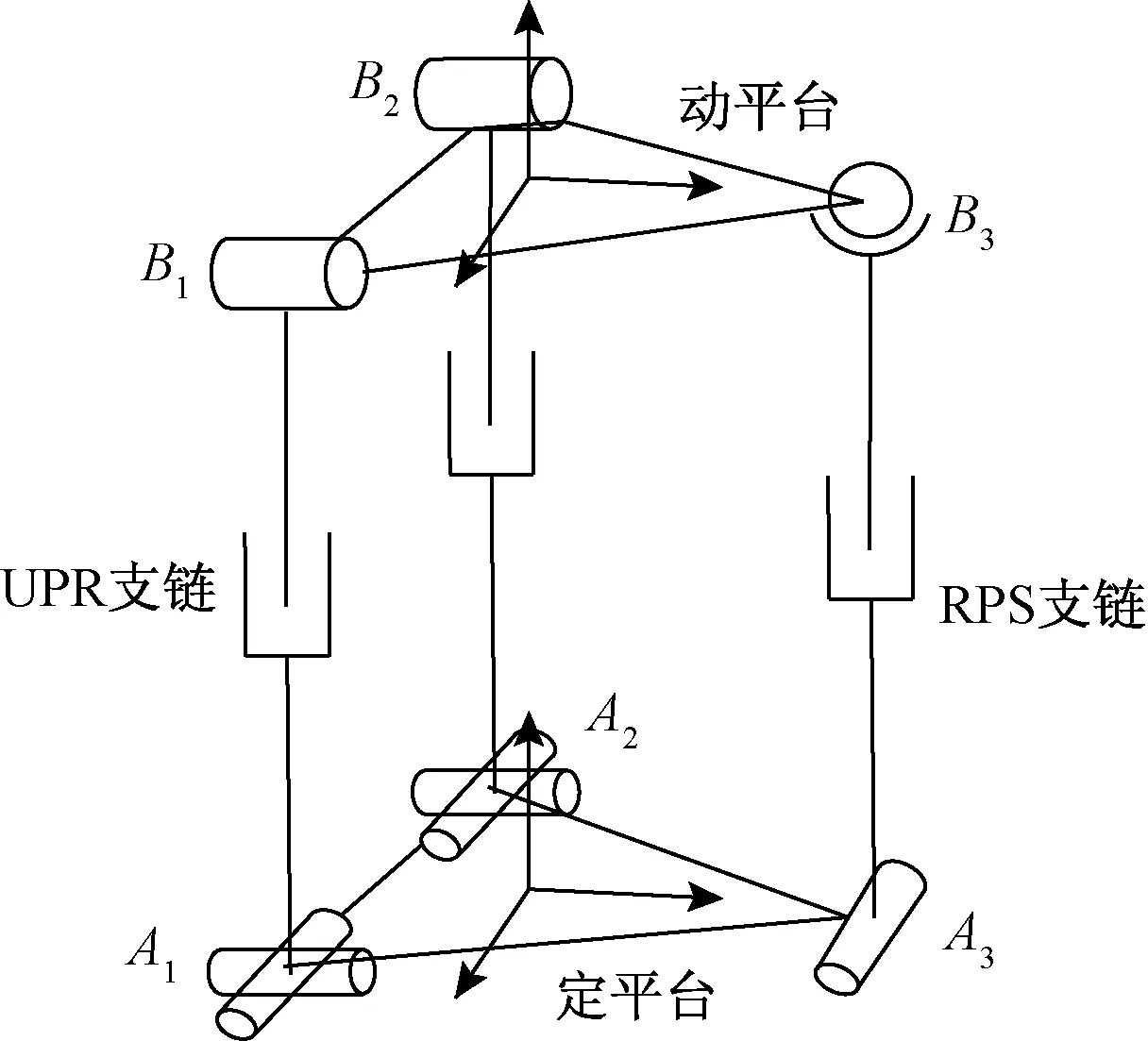
图2 2-UPR/RPS三维简图Fig.2 2-UPR/RPS three-dimensional diagram
RPS 分支中 R 副与定平台相连接A3点,S副与动平台相连接于B3点。P 副的轴线经过S副的中心点并与转动副轴线相互垂直。
在动平台和定平台中分别建立坐标如图1所示。定平台几何中心为原点O,X轴方向与RPS支链中转动副方向平行,Y轴与X轴方向垂直,Z轴垂直于定平台。整体坐标系遵循右手定则。动平台上坐标系为P-xyz,定平台上坐标系为O-XYZ。
1.2 自由度分析
基于螺旋理论[10-12]对2-UPR/RPS并联机构进行自由度分析,将运动副通过运动螺旋表示,求解其约束螺旋,在通过分析其约束螺旋,求解机构自由度。首先取UPR支链进行自由度分析,以A1点为原点创建局部坐标系,可以写出UPR支链运动螺旋为
(1)
对式(1)求反螺旋可得
(2)
同理,对RPS支链进行自由度分析,即
(3)
式中:g、f表示机构尺寸以及与轴线有关的位置变量。
对式(3)求反螺旋可得
(4)
综上所述,2-UPR/RPS并联机构的动平台有三个约束螺旋,在无约束的情况下,物体在空间中具有六个自由度,因此该机构具有三个自由度,分别是绕X轴与Y轴的转动和沿Z轴的移动。通过修正的G-K公式验证该机构的自由度,即
(5)

2 运动学分析
并联机构运动学逆解,是在确定动平台位姿参数时,如(X,Y,Z,ψ,θ,φ),求出机构各分支中驱动副的驱动参数。2-UPR/RPS并联机构将三条分支的移动副设定为驱动副,则需要求出驱动副的伸长量[13]。
动平台位姿可以用Z-Y-X型欧拉角表示。Rot为Z-Y-X型欧拉角的姿态转换矩阵。设l1、l2、l3表示AiBi(i=1, 2,3)的长度。

(6)
式(6)中:c为余弦函数;s为正弦函数。
假设定平台半径为R,动定平台半径比为λ,动平台上Bi点在动坐标系P-xyz中的坐标分别为
(7)
动平台中心点P在定平台坐标系下的位置参数为
(8)
点Bi在定坐标系下的位置参数为
OBi=Rot·PBi+OP
(9)
移动副伸长量为
li=|OBi-OAi|,i=1,2,3
(10)
根据式(8)~式(10)可以求出RPS支链的运动学逆解,即
(11)
3 并联机构平台尺寸和工作空间的关系
3.1 动静平台尺寸比对工作空间的影响
并联机构动平台可达空间是衡量其工作性能的重要指标之一,除并联机构构型外,动静平台尺寸比也是影响工作空间大小的一个关键因素。利用位置反解在MATLAB程序中求解并联机构的工作空间,设定并联机构其他参数不变,改变动平台和静平台面积大小,求解工作空间体积变化。
假设动平台面积与定平台面积之比为λ,设定λ取值范围为0.5~2,在空间中搜索并联机构动平台的可达空间,并计算其工作空间的体积大小。计算结果如图3所示。
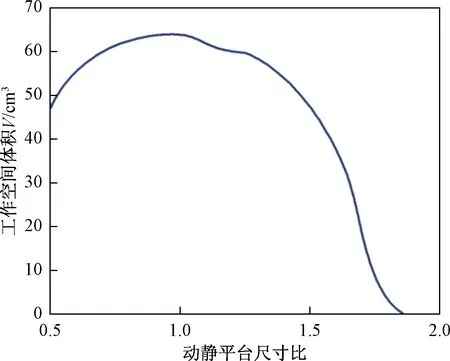
图3 平台尺寸对工作空间的影响Fig.3 The impact of platform size on working space
通过观察图3可得,随着动定平台比增大,并联机构的工作空间体积先增大后减小,当λ的取值大于1.8时,并联机构各运动副间发生干涉,无法运动。
3.2 运动副布置方式对工作空间的影响
运动副的布置方式对工作空间有较大的影响,由于球副与U副绕自身Z轴转动后无改变,所以仅能改变转动副轴线方向,在三维软件中进行建模分析,求解其工作空间。
改变定平台转动副轴线方向,改变后旋转副的轴线方向如图4所示。将原本绕X轴转动的转动副改为绕Y轴转动,计算其工作空间,通过观察可得,其工作空间如图5所示。该工作空间是X-Z平面内一个区域面积。
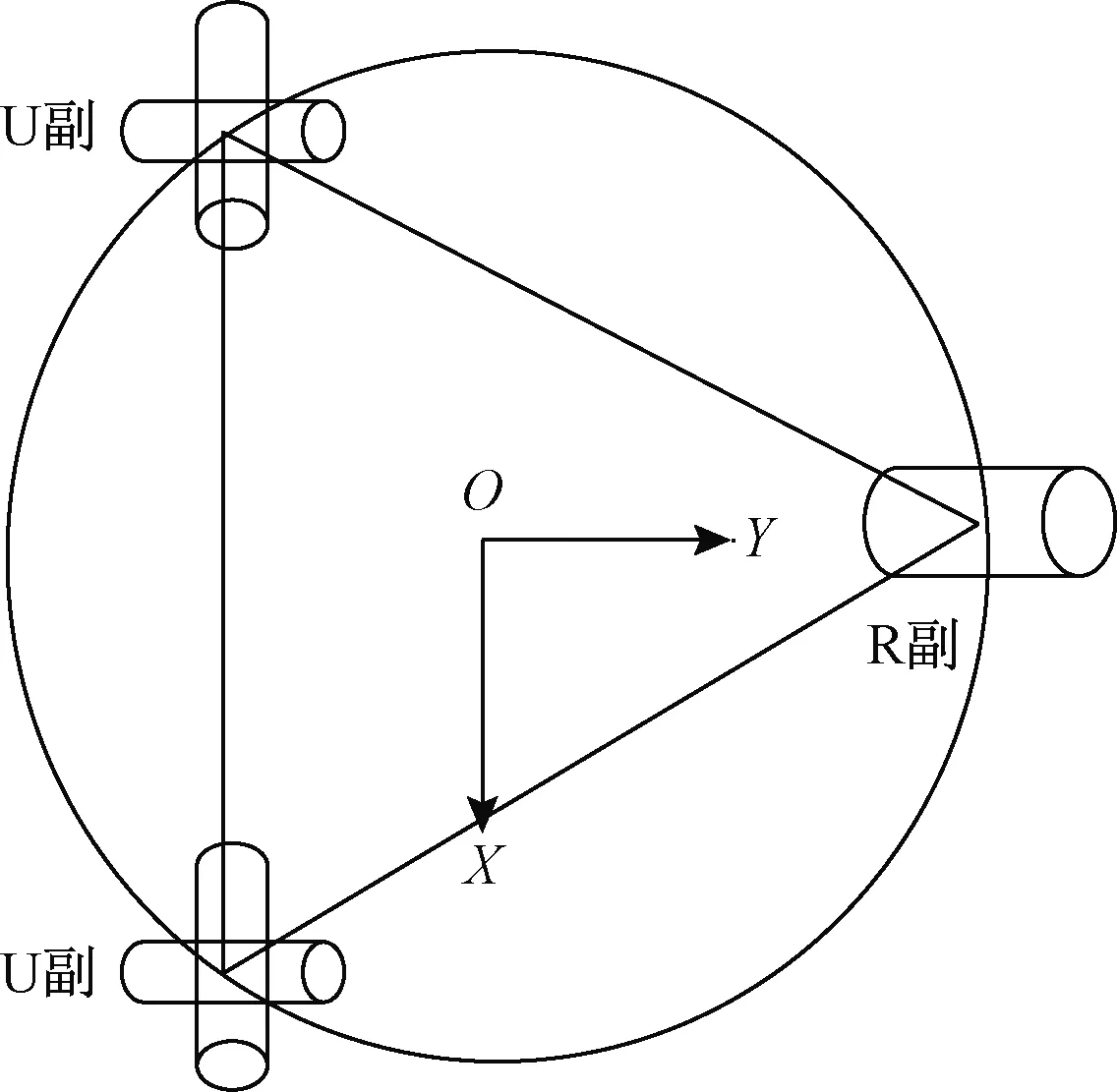
图4 定平台运动副简图Fig.4 Schematic diagram of fixed platform motion
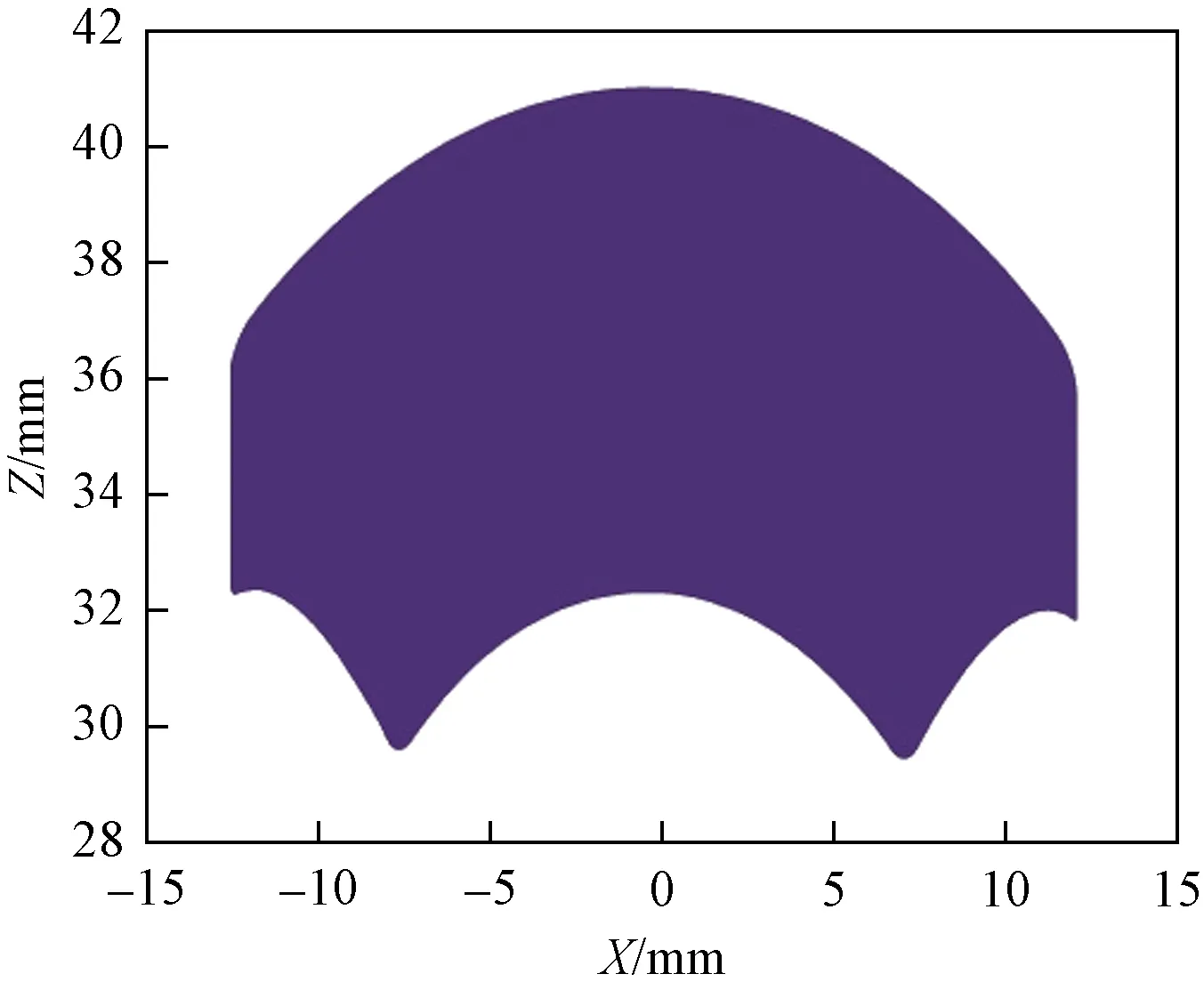
图5 改变定平台运动副后的工作空间Fig.5 Workspace after changing the motion pair of the fixed platform
改变动平台转动副轴线方向,设定其他条件不变,将转动副轴线从沿Y轴方向改为沿X轴方向,分别与X轴存在30°、120°夹角,重新求解工作空间。工作空间特点如表1所示。观察表1发现,当转动副与X轴或Y轴平行时,机构运动平稳。当转动副与坐标系存在夹角时,两个转动副之间会存在干涉现象,影响其运动。
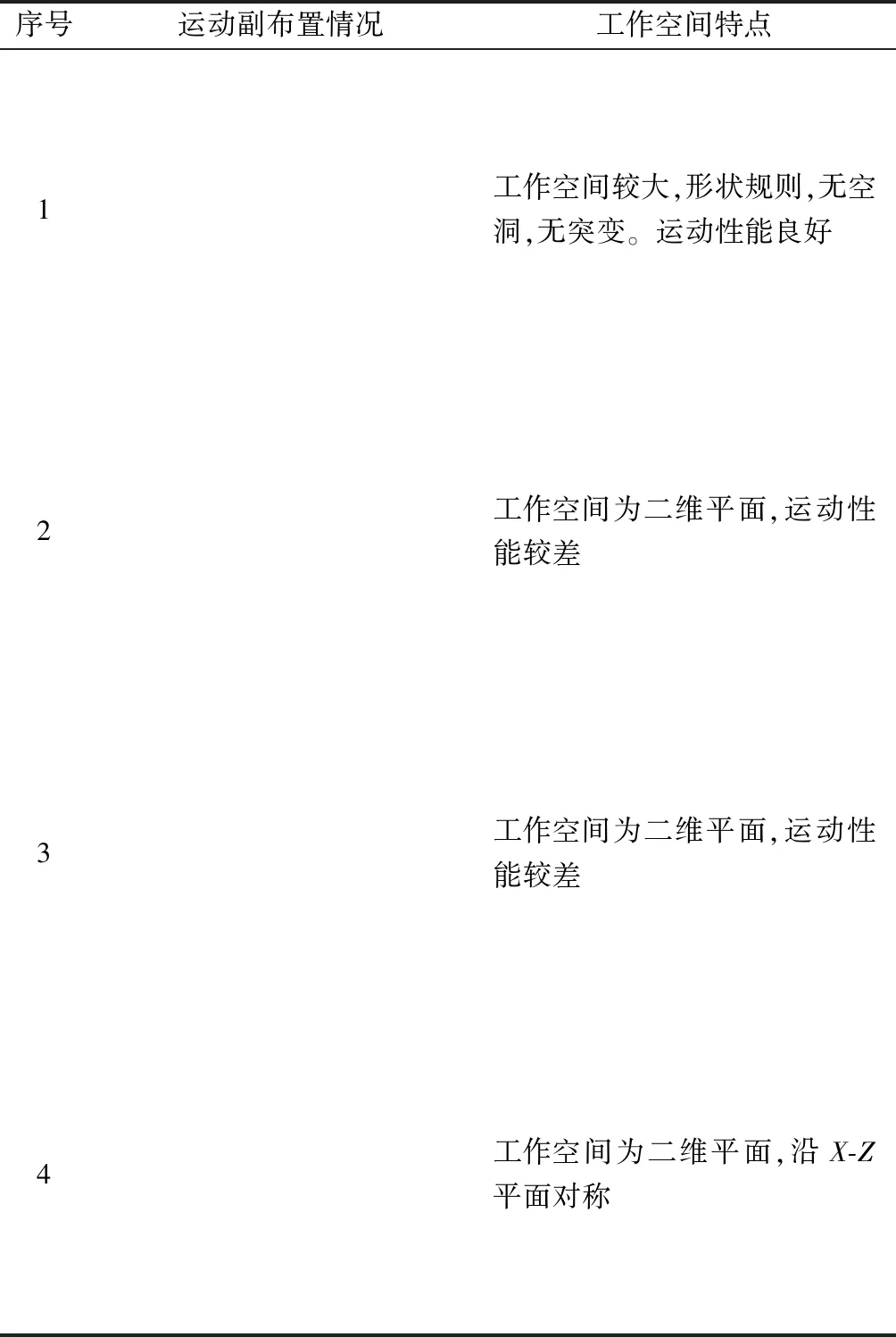
表1 运动副布置及工作空间特点Table 1 Sports assistant layout and working space characteristics
4 并联机构的工作空间
并联机构的结构参数为:静平台外接圆半径R=400 mm,动平台外接圆半径r=400 mm,动静平台尺寸比为1,RPS 支链驱动杆杆长l1=l2=450 mm,UPR 杆驱动杆杆长l3=450 mm。将求出的位置反解带入MATLAB软件中,编写求解程序,搜索其可达空间。进行运算,即可得出该并联机构的工作空间,结果如图6所示。
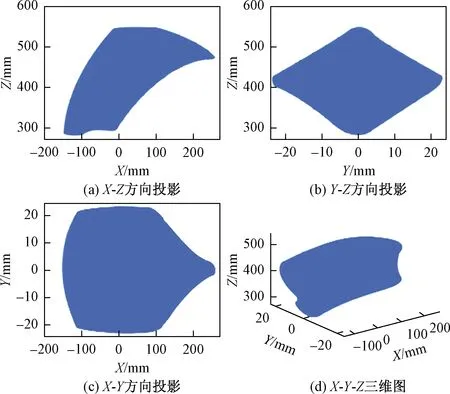
图6 2-UPR/RPS并联机构可达工作空间Fig.6 2-UPR/RPS parallel mechanism reachable working space
通过观察可得,2-UPR/RPS并联机构在空间中具有较大的工作范围,整体工作空间沿X-Z平面呈空间对称分布,整体工作空间区域紧凑,机构在工作空间内运动平稳,无奇异性。区域内无断点,无空洞。
5 结论
(1)首先利用空间螺旋理论计算2-UPR/RPS机构自由度,该机构具有绕X轴、Y轴转动和沿Z轴移动的三个自由度。并通过修正的G-K公式验证其自由度的正确性。通过闭环矢量法求解机构的运动学逆解。在三维软件中建模分析其运动性能,利用运动学反解和极限位置搜索法求解并联机构的工作空间。整体工作空间紧凑,无断点,无空洞,运行过程平稳。可应用到工业生产工作中。通过控制驱动副改变动平台位姿参数,可适用于不同规格产品的分拣工作。
(2)考虑到机构的尺寸参数对并联机构工作空间的影响,通过控制变量的方式分析动静平台尺寸比和运动副布置方式对工作空间的影响。在工业自动化流水线上,将抓取装置安装于动平台上,动平台采用UPR支链转动副方向与Y轴方向一致的布置方式,在考虑实际安装需求及工位空间尺寸时,动静平台尺寸比应选取在0.8~1.3,此时机构的工作空间明显大于其他尺寸,对机构的样机制造具有十分重要的现实意义。
猜你喜欢
哈尔滨轴承(2022年1期)2022-05-23
中学生数理化·中考版(2021年10期)2021-11-22
农业机械学报(2021年10期)2021-11-09
北京测绘(2021年7期)2021-07-28
房地产导刊(2020年12期)2021-01-14
房地产导刊(2020年12期)2021-01-14
北京航空航天大学学报(2019年3期)2019-04-08
电子制作(2019年23期)2019-02-23
消费导刊(2018年8期)2018-05-25
燕山大学学报(2015年4期)2015-12-25