提高二次监视雷达解码有效性的方法
2021-06-25 11:10周海林
电子测试 2021年4期
周海林
(四川九洲电器集团有限责任公司,四川绵阳,621000)
0 引言
地面二次监视雷达系统利用地面航管询问机发射询问、机载航管应答机应答对目标飞机进行探测定位,实现对协同飞机的空间位置、代码、高度及飞机航迹的显示。
随着我国社会经济的飞速发展,现代空中交通的日益繁忙,实现准确的空中交通管制对二次监视雷达的探测能力和解码准确性都要求较高。而实际中,二次监视雷达与飞机之间除直达路径外的还存在地面反射电磁波信号的路径,即多径信号影响会降低二次监视雷达的解码有效性。本文针对该类情况,提出了一种提高地面二次监视雷达解码有效性的方法,运用对机载航管应答信号框架脉冲全译码,同时动态调整一致性参数,并在仿真测试中得到了有效验证。
1 二次监视雷达系统工作原理
按照国际民航组织(ICAO)规范,传统航管二次监视雷达共有6种询问模式,分别称为1、2、3/A、B、C、D模式。实际民航常用3/A、C两种模式,其中3/A(简称A模式)模式兼用于军用识别和民用识别询问,C模式用于高度询问。
机载航管应答机接收到地面二次监视雷达发射的询问信号后,根据询问的模式选择应答内容(一串脉冲),这串脉冲序列即为机载的航管应答信号。A/C询问模式的应答码格式是一致的。如图1所示,应答码由16个信息码为组成,这些信息码位的顺序是F1、C1、A1、C2、A2、C4、A4、X、B1、D1、B2、D2、B4、D4、F2和SPI。每一个信息码位有两种状态,有脉冲时信息为“1”,无脉冲时信息为“0”。其中F1和F2叫做框架脉冲,这两个脉冲信息必须为“1”。

图1 应答信号格式
航管应答机响应A模式询问时,12个信息码从高位到低位的排列顺序是:A4A2A1、B4B2B1、C4C2C1、D4D2D1,地面二次监视雷达按照A、B、C、D每四位数码按八进制进行的数字显示。
2 多径信号对地面询问机解码错误的影响
2.1 多径信号产生原理
根据电磁波传输理论,二次监视雷达系统的电磁波发射/接收是在非自由空间的地球表面上进行的。由于地表、地形与地物等因素的影响,接收到的电磁波是由直射波和经地表地物反射的多个路径传输来的电磁波合成波,即多径传输。一般情况下,除直射波以外,对合成波影响最大的是地表发射路径形成的电磁波。
对于收发共用一个天线的二次监视雷达,多路径传输示意图如图2所示。

图2 理想情况多径几何关系
需要计算信号反射点:

通过计算,可得出路径差δ、擦地角φ的计算公式。

2.2 解码错误的原因
在某实际工程中,飞机航管应答机设置应答码为危机识别码7700,飞机航管应答机响应地面二次监视雷达A模式识别询问后,二次监视雷达监控视频却显示为“7767”,而且该应答码持续显示了一段时间。事后分析不能正确解码的原因为多径效应的影响。
直射信号和多径信号在时间上形成交错,两个信号的时间差会改变应答脉冲的视在数目,从而导致地面二次监视雷达错误的解码。从图3可知,当应答的直达信号为7700时,应答经过地面反射形成多径信号与直达信号的路程差为1305m左右,时间延迟刚好4.35μs,根据原有应答的框架脉冲F1和F2,同时将直达信号与多径信号在组合后进行译码,可知只有C1码位没有脉冲,所以地面二次雷达将航管应答机显示为7767。
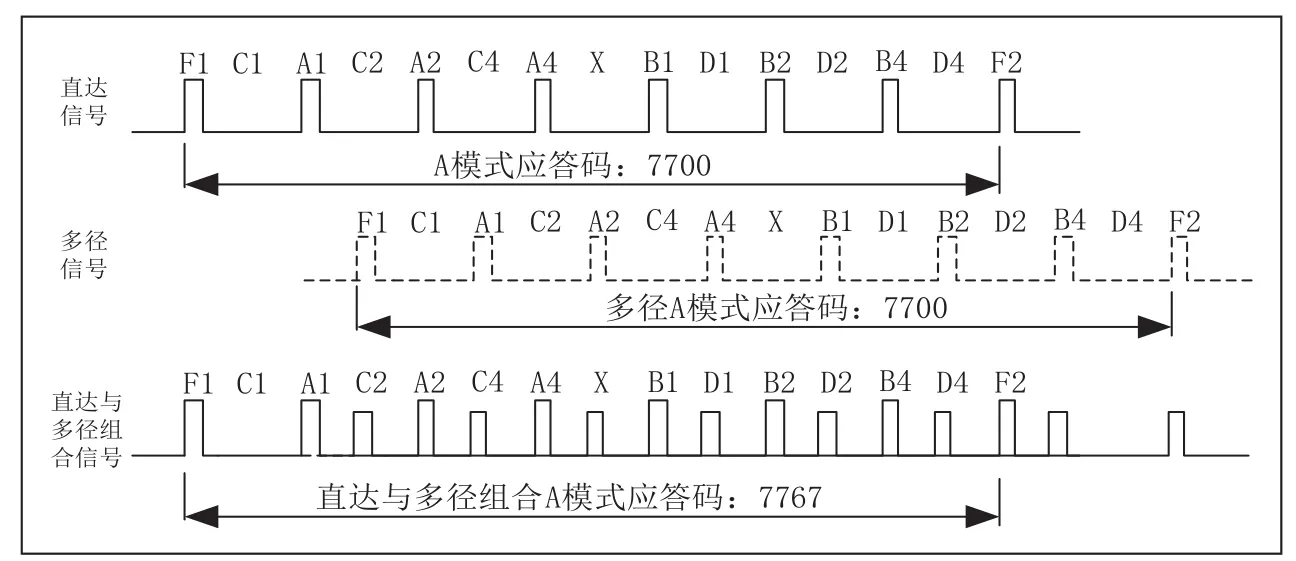
图3 解码错误过程图
针对地面二次监视雷达解码错误,提出对应答信号框架脉冲进行全译码,同时根据目标交织情况,动态调整译码幅度一致性的参数。
3 本文方法
3.1 航管应答信号常规解码算法
地面二次监视雷达检测航管应答的存在就是对应答中框架脉冲F1和F2的检测,当检测到应答框架出来之后,就译码框架内12个信息码位。询问机对应答信号解码采用应答脉冲幅度进行检测的方法,即将1090MHz信号下变频为中频信号后、AD数字采样、以及数字滤波和数字下变频等,最后解算出幅度信息,再进行信息码位脉冲幅度信息与框架脉冲幅度信息进行一幅度致性的比较,门限一般常规设置为6dB,通过幅度一致性比较之后,就得到A/C应答代码。
3.2 航管应答信号全译码
全译码方法要求地面二次监视雷达软件先搜索航管应答信号的框架脉冲F1和F2,即找到所有的符合标准的框架脉冲,根据应答框架脉冲可能找到N个目标,再搜索在N个目标内是否存在有两个目标共用部分脉冲,即后面一个目标2的部分脉冲被目标1的用作了信息码位的脉冲,全译码方法流程如图4所示。当目标脉冲交织时,由于多径信号是通过地面反射之后的信号,其信号幅度有一定的衰减,即多径信号幅度大小一般情况下与直达信号幅度大小有一些差异,此时二次监视雷达软件可以动态调整脉冲幅度一致性参数,提高一致性参数标准,达到将多径信号脉冲剔除,保留航管应答机的直达信号脉冲。最终达到提高二次监视雷达解码的有效性。
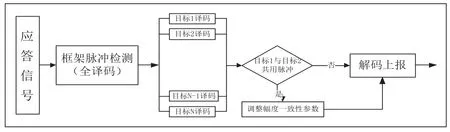
图4 全译码方法流程
4 仿真结果
采用Matlab软件针对此类情况进行仿真分析,设置仿真条件二次监视雷达收到航管应答信号为1个直达信号目标和1个多径信号目标,同时航管应答的A代码随机设置;直达信号所有脉冲幅度不一致性设置为≤1dB,同样多径信号所有脉冲幅度不一致性也设置为≤1dB;设置二次监视雷达软件调整脉冲幅度一致性参数为1dB。1个多径信号目标(与直达目标)距离差分别设置为435m、870m、1305m,即时间差刚好为1.45μs、2.9μs、4.35μs,多径信号幅度与直达信号幅度差分别设置为1dB、2dB、3dB、4dB、6dB,验证对多径应答信号脉冲剔除能力。仿真结果如表1所示。在多径信号幅度与直达信号幅度差异越大时,其解码的有效性越高。
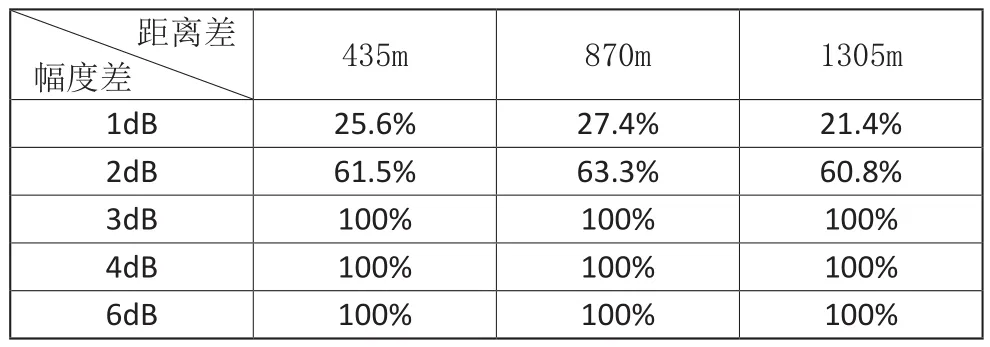
表1 对航管应答机正确解码的概率
5 结束语
本文采用全译码方法,搜索所有可能的应答框架脉冲F1、F2,从而可以知道航管应答目标机是否存在多径目标或其他航管应答目标,如果目标机的框架脉冲内存在有其他目标的脉冲,这时二次监视雷达软件动态调整幅度一致性比较的参数,从而可以提出多径信号的脉冲,当多径信号的脉冲幅度与直达信号脉冲幅度差异越大时,剔除多径目标脉冲的概率就越高,二次监视雷达的解码有效性越高。
猜你喜欢
航天器工程(2021年2期)2021-04-28
现代计算机(2021年36期)2021-03-14
科学导报·学术(2019年3期)2019-09-10
百科探秘·航空航天(2018年11期)2018-11-29
电脑知识与技术(2017年1期)2017-03-24
电子制作(2017年23期)2017-02-02
新闻传播(2016年3期)2016-07-12
遥测遥控(2015年5期)2015-04-23
遥测遥控(2015年2期)2015-04-23
华东理工大学学报(自然科学版)(2014年3期)2014-02-27