
智能机械手在车轮生产线上的应用探索
2021-06-23 10:08张世欢吴玉国耿培涛
世界有色金属 2021年21期
张世欢,吴玉国,耿培涛
(1.安徽工业大学机械工程学院,安徽 马鞍山 243032;2.马鞍山钢铁股份有限公司,安徽 马鞍山 243003)
MG车轮公司拥有生产设备547台,包含2条车轮轧制线、1条箍环轧制线、2条车轮热处理生产线、3条车轮精加工生产线、4条车轮检测线。目前MG车轮公司部分生产线仍使用悬臂吊,自动化程度低,应用智能机械手是提高生产线自动化程度的有效途径。
1 应用智能机械手的意义
MG车轮历经60多年发展,所产车轮在国内外皆有不错口碑。车轮生产制造相对固化,虽然在行业内具有一定的竞争力,但与先进的车轮制造商相比,仍在自动化方面存在不足。现场加热、轧钢等操作室多,人员调配效率低下,人力资源需求多,协调和管理方面也消耗大量的人力物力。生产排程需要人工排程,工序之间存在大量人为干预,因此生产稳定性差,无法根据产线能力自动调节,上下料系统准确率相对偏低。
基于以上考虑,我们提出在生产线上应用智能机械手来代替悬臂吊。
2 车轮生产线上下料系统
车轮上下料系统是车轮生产、打捆,堆垛、运输中最为关键的。其现场设备构成及动作顺序如下:
钢坯加热→90MN压力机镦粗、成形→无芯棒立式轧机轧制→SIRD700旋转锻压机冲孔、辐板成形、精整→台车式隧道缓冷炉→空冷至室温→环形热处理加热炉→淬火→台车式隧道回火炉→抛丸→硬度检测→超声波探伤→加工→检测→刷油包装。
车轮热处理加热炉为外径Φ16m单排环形加热炉,淬火台为热处理加热炉和控制台所包围,有四组淬火台,加热炉外通过智能机械手同时给四组台子上下料,兼提供给回火炉落垛的功能。回火炉为两座单排台车式隧道炉,长度约30m,每台车落垛6件车轮,为两两上料。
3 上下料系统对智能机械手的要求
目前上下料系统涉及如下几个重要部件:
(1)自动装载机:采用地面架轨方式安装,轨长约80m,跨距约16m,工作范围覆盖整个缓冷料场;大车横移速度0~60m/min,小车横移速度0~40m/min,吊具起升速度0~12m/min。一台负责缓冷坑揭盖及车轮垛入缓冷坑,一台负责车轮垛入库出库,两台自动装载机功能配置一样,可互为备用。
(2)悬臂吊改造:使之具备旋转和解垛车轮垛功能,负责将缓存区中的车轮垛解垛,运至7#炉。
(3)温度检测设备:该设备设置于入缓冷坑交接位,实施检测码垛的第一个车轮温度,当温度达到允许的最低工艺参数时,可以手动控制提前将交接位上的车轮垛转运至缓冷坑。
为了克服智能机械手在高速、重载运行情况下稳定性差和精度差等诸多难题[1],需匹配重载、快速、大跨距、耐高温和高重复定位精度等要求的智能机械手,满足强度、刚度要求,以保障智能机械手的安全运行。
4 智能机械手的结构
智能机械手装备虽复杂,但简化后的机械手主要由控制系统、驱动系统、执行机构以及位置监测装置等部分组成[2]。各机械系统组成关系,如图1所示。
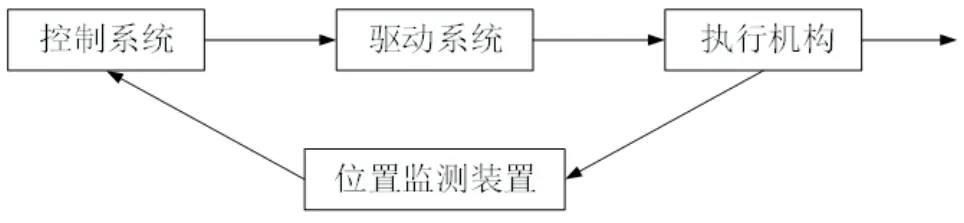
图1 各机械系统组成关系
智能机械手通过控制机械手主臂和手爪系统配合操作,将车轮垛放入目标位置。为了使机械手在水平和垂直方向自由转动,本文设计一种简单的4自由度机构[3],分别是:转台旋转运动、大臂上下摆动、小臂上下摆动、手腕旋转运动,如图2所示。根据机械手三维结构,简化机械手抓取部分,以底座为参考坐标系,其余各关节处为相对坐标系建立运动学关系。以机械手各关节为坐标原点[4],连杆方向为X轴,连杆垂直方向为Y轴,建立D-H坐标系进行数学建模分析。
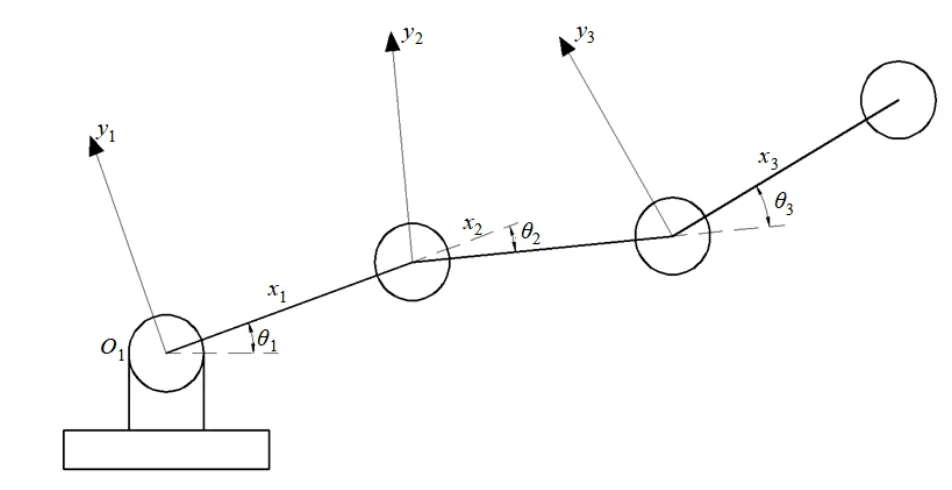
图2 机械手连杆简化坐标系
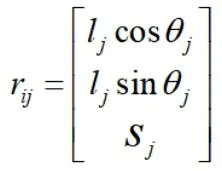
根据机械手各关节位置关系和运动轨迹,可得:
移动矩阵为:
旋转矩阵为:
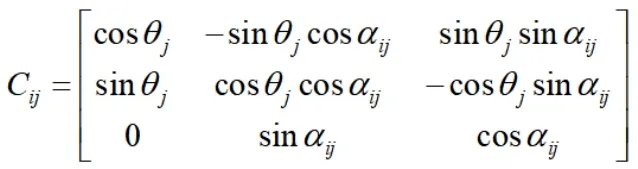
根据移动矩阵rij和旋转矩阵Cij,计算可得D-H坐标系下机械手某点N的坐标,从j坐标系变换到i坐标系的变换矩阵Mij为 :
计算可得机械手某点N从初始坐标系χiφiγi移动到目标坐标系χ jφjγj的公式为 :
5 机械手驱动系统
安装的机械手需要具备旋转和解垛车轮垛功能,负责将缓存区中的车轮垛逐个解垛,所设计的上下料搬运机械手必须满足这个特点,且需要精确的定位功能。根据以上因素分析,以驱动类型、输出力、结构性、安全性、操控性、安装要求以及维护要求等因素为参考对象,分别对液压驱动、气压驱动、电机驱动三种不同驱动系统进行比较,如表1所示。
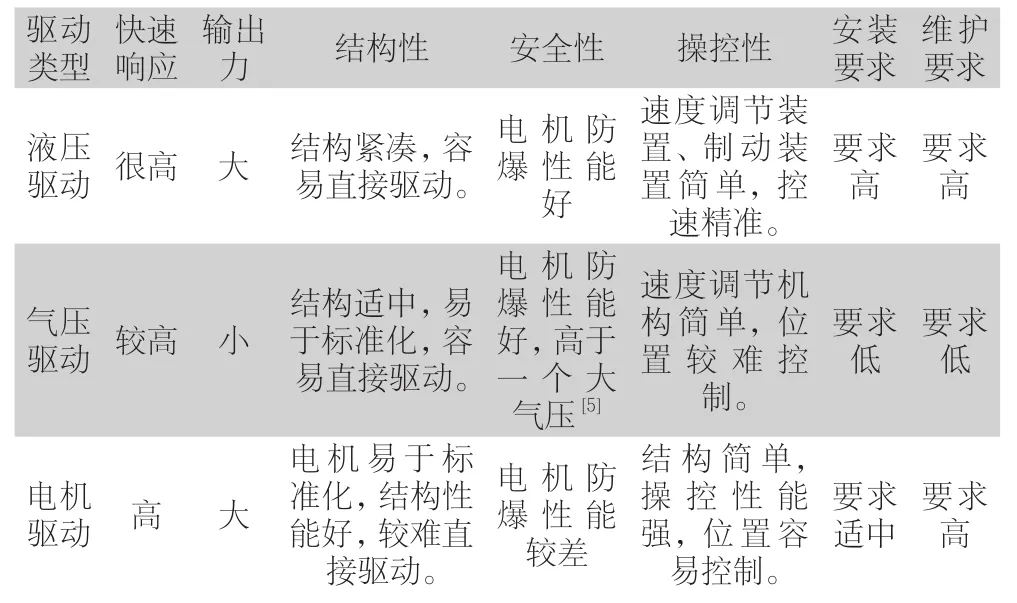
表1 机械手驱动系统特性表
由于车间位置紧凑,车轮垛较重,要求快速响应的同时,输出力较大,机械手运动状态易于简单操作,各个关节控速精准。综上分析,智能机械手选取液压驱动方式。
6 智能机械手相关问题
(1)重复定位精度要求高:智能机械手每天工作量巨大,尤其是重复工作部分,需在设定好指定路线情况下,精准到达指定点。通过多次试验定位基准得到误差反馈,多次测算并进行计算机编程操作,降低重复定位偏差值。
(2)集成化:复杂的机械传动系统由多个子系统组成,器件的集成度不断强化,每一个子系统能够独立完成设计工作,各个子系统功能作用在一起,便能完成机械系统总体功能要求。
(3)模块化:计算机开放型控制器成为研究热点方向,模块化、轻量化、标准化、网联化是智能机械手未来重点发展领域。位置传感器和速度传感器不断进化,更是助推智能机械手进步。加入导向驱动装置的智能机械手具有弹性运载等优点。
7 应用结果
智能机械手具有水平、垂直运动速度快等优势,生产过程中应用智能机械手可以大幅提高自动化水平,节约人工劳动强度,生产更加安全可靠。其结构刚性好,操作方便,能满足各种产品生产搬运工作。机械手可配置为全闭环系统,能实时检测位置指令和实际位置是否一致,操作方便。
8 结语
上下料系统是MG车轮公司生产、堆垛、解垛、运输中最为关键的,使用频次高,是车轮公司不可缺少的重要设备。本课题根据设备工作特点和现场工艺要求,从机械手连杆特性、驱动方式等方面进行了系统优化,将堆垛区的悬臂吊改造为智能机械手,装备智能化水平显著提高。
猜你喜欢
中国设备工程(2022年15期)2022-08-19
石油石化节能(2022年6期)2022-07-02
机电工程技术(2021年3期)2021-09-10
数学大王·低年级(2021年2期)2021-02-21
电子制作(2019年13期)2020-01-14
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
环球时报(2019-07-18)2019-07-18
汽车观察(2019年2期)2019-03-15
小猕猴智力画刊(2018年7期)2018-08-08
