四旋翼飞行器的模糊自抗扰姿态控制
2021-06-22 04:47时来富沈建新王启盛降俊胜
机械制造与自动化 2021年3期
时来富,沈建新,王启盛,降俊胜
(南京航空航天大学 机电学院,江苏 南京 210016)
0 引言
四旋翼飞行器是一种应用广泛的多旋翼飞行器,其飞行控制器是典型的强耦合性非线性欠驱动系统,具有4个控制输入和6个自由度的输出。同时四旋翼具有模型参数摄动、外界扰动不确定等特点,但因其高机动性,具备垂直起飞、着陆和悬停能力以及在传统无人机无效地区的易操作性而引起了广泛的关注与研究。四旋翼无人机在民用方面有着广阔的应用前景,如制图、航空摄影、电力线检、交通监控、作物监控和喷洒、边境巡逻、自然灾害的火灾探测与控制和搜救行动等[1-2]。
四旋翼飞行器飞行控制系统的设计是完成上述任务的基础,而姿态控制又是飞行控制系统的核心。目前针对四旋翼姿态控制的方法主要有PID控制[3-4]、LQR控制[5-6]、滑模控制[7]、反步法控制[8]和自适应控制[9]等。
在现实中,由于PID控制算法对被控对象不要求具体模型、参数容易调试,但是PID控制器信号处理过于简单,不易满足高性能要求。LQR控制可以得到四旋翼系统模型的最优线性状态反馈并构成闭环最优控制,但其控制效果受到模型精确度的影响较大。滑膜控制可以较好地解决系统的不确定性并对外部干扰具有较强的鲁棒性,但当状态轨迹到达滑动模态面后,会在平衡点附近产生抖振现象,缺乏一定的稳定性。反步法控制是一种递归算法,可将控制器分解为多个系统并逐步稳定每个子系统。虽然反步法具有收敛速度快、抗干扰性较强的特点,但该算法鲁棒性较差,需要融合其他方法进行补偿。自适应控制算法旨在适应系统中的参数变化并对其做出补偿,但是在使用标准自适应控制器时,调节速度过快会导致高增益的反馈,而调节速度过慢会加长过渡过程和减缓收敛过程。
上述方法的控制性能在很大程度上依赖于飞行动力学模型的精度以及相关参数的测量。然而,无人机系统始终存在内部不确定性(参数不确定性和未建模的动力学部分)和外部不确定性(未知干扰)。因此,数学模型的仿真与实际飞行之间的误差总是不可避免的,同时上述方法也难以满足轨迹控制的精度要求。由韩京清先生首先提出的自抗扰控制器[10-11],完美地继承了PID控制不要求被控对象精确模型的优点,同时解决了PID控制不易满足高性能要求的问题。
本文考虑四旋翼飞行器在飞行时存在参数不确定性和外界扰动的问题,针对X型四旋翼提出一种基于非线性模糊自抗扰的姿态控制策略。
1 四旋翼飞行器数学姿态模型
1.1 四旋翼姿态控制
四旋翼的飞行控制多采用内外环控制策略,外环控制器是位置控制,位置控制输入的是期望位置信息,并解算出期望的水平姿态角θd和φd。而本文研究的姿态控制是飞行控制系统中的内环控制,通过接收外环控制输出的指令和偏航姿态角ψd作为姿态控制器的输入,并解算出期望力矩τd,最终通过无人机的控制分配器和电机控制器来达到控制无人机姿态的目的。具体的姿态控制模型如图1所示。

图1 四旋翼姿态控制物理模型
1.2 四旋翼的数学姿态模型
由于四旋翼飞行器的非线性特性,不可能建立其精确模型[12],本节基于假设建立X型四旋翼飞行器姿态数学模型。在建立模型过程中提出如下假设: 1)四旋翼是刚体;2)四旋翼质量和转动惯量不变;3)四旋翼几何中心与质心一致。
根据右手定则分别建立地面惯性坐标系E={Oe,xe,ye,ze}和机体坐标系B={Ob,xb,yb,zb},两者之间的关系如图2所示。机体姿态欧拉角Θ=[φ,θ,ψ],其中φ为滚转角,θ为俯仰角,ψ为偏航角。

图2 X型四旋翼飞行器结构示意和坐标定义图
根据图2所示的四旋翼飞行器结构以及定义的机体坐标系,建立四旋翼的姿态学模型如式(1)所示。
(1)
式中:U1代表垂直运动控制量;U2代表滚转运动控制量;U3代表俯仰运动控制量;U4代表偏航运动控制量;Ji(i=x,y,z)代表机体绕各自坐标轴的转动惯量;J代表电机转动惯量。
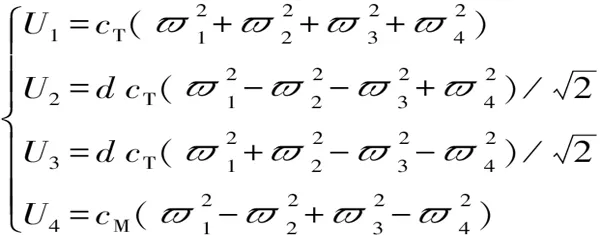
(2)
式中:d表示四旋翼机体中心到电机的距离;cT表示螺旋桨拉力系数;cM表示螺旋桨转矩系数;i(i=1,2,3,4)表示电机转速。
2 模糊自抗扰姿态控制器
2.1 模糊自抗扰控制原理
无人机系统始终存在内部不确定性,如部分内部参数不能确定和未建模的动力学部分等,同时无人机在飞行中也容易受到外界未知因素的干扰,如干扰风、大气压、温度等。自抗扰控制器区别于其他控制器的优点就是不依赖于被控对象精确的数学模型,可以对系统模型的内外扰动进行实时估计并补偿,因此在控制对象遇到不确定性扰动或者参数发生变化时也能得到良好的控制效果,具有很强的鲁棒性[13-14]。模糊自抗扰控制(fuzzy active disturbance rejection control, FADRC)由4部分组成,分别是跟踪微分器(tracking differentiator, TD)、扩张状态观测器(extended state observer, ESO)、非线性误差反馈控制律(nonlinear state error feedback,NLSEF)和模糊逻辑控制(fuzzy logic control, FLC),其结构如图3所示。

图3 二阶模糊自抗扰控制器框图
下面以二阶FADRC为例介绍这几部分。
1)跟踪微分器TD
跟踪微分器为系统输入安排过渡过程, 可以平滑地输入信号的突变部分并提取输入信号的微分信号,同时具备滤波的作用。TD离散化表达式为
(3)
式中:v1为跟踪输入信号;v2、fh分别是v1的一、二阶导数;T为离散采样时间;fhan(x1,x2,r,h)为最速跟踪函数,其表达式为
(4)
式中:r为决定跟踪快慢的速度因子;h为滤波因子。
2)扩张状态观测器ESO
扩张状态观测器作为整个非线性自抗扰控制系统的核心,用来反映模型未知部分和外部不确定性扰动综合对被控对象的影响。ESO通过设计一个状态量来实时估计由系统内部不确定性和外部扰动共同构成的总扰动,并在后续控制中给予动态补偿,从而将被控对象变为普通的积分串联型控制对象。ESO的输入信号为被控对象的输入u和输出y,输出信号z1、z2、z3分别代表ESO对系统内部状态和系统所受“总和扰动”的估计值,其中z3表示观测器扩张出来的状态,表示对“总和扰动”的估计。ESO的离散化表达式如式(5)所示。
(5)
式中:β01、β02、β03是误差反馈增益,主要影响ESO的收敛速度;α1、α2是fal函数非线性部分的幂次,一般取α1=0.5,α2=0.25;δ为fal线性部分的区间宽度;b为控制通道增益,决定总扰动估计值得变化范围。fal是一种传统非线性函数,其表达式如式(6)所示。
(6)
3)非线性误差反馈控制律NLSEF
自抗扰控制器中的非线性误差反馈律模块作为一个独立于控制对象的非线性控制器,根据跟踪微分器产生的输出跟踪信号及其微分信号与扩张状态观测器观测到的状态变量估计之间的误差,进而控制系统并对系统总和扰动进行动态补偿。NLSEF离散化表达式为
(7)
式中:β1、β2分别是非线性反馈比例因子和微分增益;fal函数为非线性函数,α3、α4、δ0的意义参见式(5)中的α1、α2、δ0。
4)模糊逻辑控制FLC
根据对自抗扰控制原理的分析,发现在设计控制器的过程中需要手动调整的参数较多。为了降低参数整定的难度,在非线性误差反馈部分融合模糊逻辑控制策略,从而达到系统自动调整非线性反馈比例因子β1和微分增益β2的目的。在控制器中,以误差信号e1和其微分信号e2为输入,利用模糊控制规则对β1和β2进行实时修正,以满足不同时间的要求。在控制器中,模糊变量的输入为e1和e2,输出为β1和β2,同时定义5种语言集{NB,NS,ZO,PS,PB}来对输入和输出量进行模糊化处理,接着建立模糊规则。根据制定的模糊规则求解模糊关系和进行模糊推理,最后对控制量进行反模糊化处理。
2.2 模糊自抗扰姿态控制器设计
根据式(1),发现滚转、俯仰和偏航3个通道之间相互耦合,这是姿态控制器设计的最大难点,而自抗扰控制可以很好地解决这个问题。将不同通道之间的相互影响当作系统的内部扰动,同环境引起的外部扰动综合在一起作为系统的总扰动,然后各通道分别对总扰动进行实时估计并做出补偿,从而实现解耦控制。每个通道由原来的非线性、不确定对象变为 “积分串联” 型线性系统。整个系统的结构如图4所示。

图4 四旋翼模糊自抗扰姿态控制器框图
通过以上分析,将式(1)改写为非线性自抗扰控制理论相对应的形式,如式(8)所示。
(8)

从式(8)可以知道,被控对象均是二阶非线性不确定的,以滚转通道φ为例,设计二阶模糊自抗扰姿态控制器对其进行控制。
首先设计系统的跟踪微分器TD,向系统输入滚转角的期望值φd,经过TD提取其跟踪信号φ1和微分信号φ2,TD的表达式如式(9)所示。
(9)
其次设计系统的扩张状态观测器。先计算滚转角的期望值与实际值的误差eφ,然后设计状态量zφ1观测滚转角的误差。zφ2观测误差的微分信号和设计扩张出来的状态量zφ3观测系统的总扰动。ESO的表达式如式(10)所示。
(10)
最后设计系统的非线性误差反馈控制律,根据TD得到的期望信号及其微分信号与状态观测器观测到的输出和输出微分误差,从而对系统进行控制和扰动补偿, 并在此基础上融合模糊策略控制。NLSEF的表达式如式(11)所示。
(11)
根据文献[15]的参数整定规则,分别建立针对e1和e2的参数整定模糊控制表,β1和β2调整控制表分别如表1和表2所示。

表1 β1的调整规则表

表2 β2的调整规则表
假设e1、e2和β1、β2均服从正态分布函数,采用Mamdani模糊处理方式和加权平均的去模糊化处理,得到每个模糊子集的隶属度函数。根据每个模糊子集的隶属度和参数模糊控制模型,利用模糊推理,设计β1和β2的模糊矩阵表,找到修正后的参数并将其带入式(12)中,即可得到它们的值,将修正后的参数值带入NLSEF模块中,得到滚转通道的模糊自抗扰姿态控制器。
(12)
以上是滚转通道的设计过程,俯仰通道、偏航通道与高度通道控制器设计过程与上述相似,这里不再赘述。
3 仿真试验与结果分析
3.1 非线性自抗扰算法验证实验
为了验证本文所设计飞行姿态控制器的性能,在MATLAB/Simulink中按图3搭建仿真系统, 四旋翼飞行器模型参数如表3所示,自抗扰控制器参数如表4所示。

表3 四旋翼飞行器模型参数
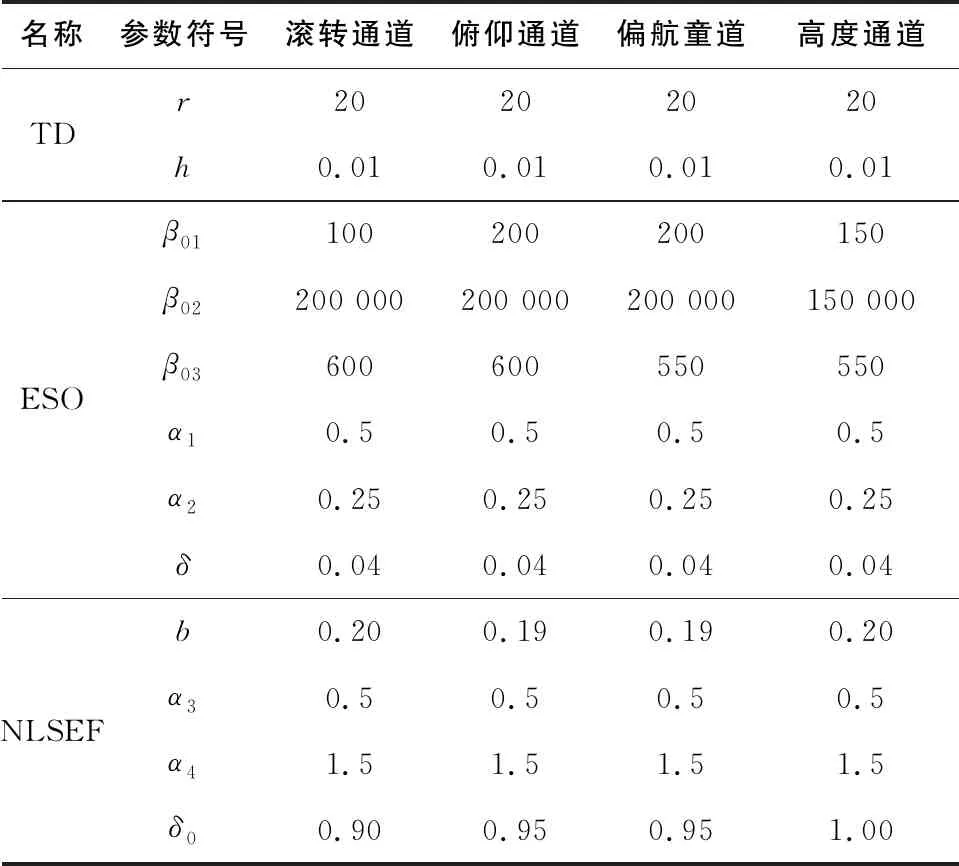
表4 FARDC仿真参数
3.2 姿态解耦实验
根据前文所设计的FADRC姿态控制器,同时设计传统的PID控制器,在MATLAB环境下,将两者应用于同一四旋翼模型进行仿真。两种算法的解耦性能、仿真结果如图5和图6所示。

图5 FADRC 姿态解耦控制跟踪响应曲线
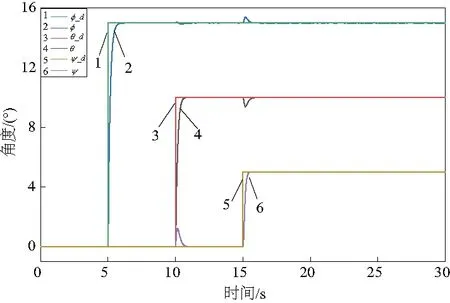
图6 PID 姿态解耦控制跟踪响应曲线
图5为FADRC姿态控制器作用下的响应曲线,其中θd、φd、ψd分别表示俯仰通道、滚转通道和偏航通道输入姿态角的期望值;θ、φ、ψ分别代表3个相应通道的输出值。从图中可以看出,FADRC姿态控制器可以很好地跟踪输入的期望值,并且在跟踪过程中3个姿态角中任意一个姿态角发生变化都不会对其他两个姿态角产生影响。图6为PID姿态控制器作用下的响应曲线,根据图6,PID控制器同样可以很好地跟踪输入的期望值,但是3个姿态角中任意一个姿态角发生变化都会影响其他两个姿态角的稳定性。根据两者的对比结果,不难发现本文所设计的FADRC姿态控制器可以有效地解决四旋翼飞行器各姿态通道之间的强耦合性问题。
3.3 抗干扰性和鲁棒性实验
以滚转通道φ为例,在没有干扰风的情况下,本文所设计的FADRC姿态控制器和传统PID姿态控制器的仿真结果如图7所示。

图7 无干扰风下滚转角响应曲线
从图7可以看出,在没有干扰风的情况下,传统PID控制器在0.9s收敛至稳态值,而FADRC控制器在1s达到稳态值,并且两者在达到稳态之后都能平稳地跟踪目标。
为了研究控制器的抗干扰性和鲁棒性,假设无人机在飞行过程中受到不同的干扰风影响,使得四旋翼飞行器姿态角产生较大的角度偏差。根据文献[16],在Simulink中建立4种干扰风的数学模型,包括基本风、阵风、渐变风和随机风,并将这4种模拟干扰风分别添加到系统模型中。同时,具有各种干扰风的系统输出特性如图8-图11所示。

图8 基本风干扰下滚转角响应曲线

图9 阵风干扰下滚转角响应曲线

图10 渐变风干扰下滚转角响应曲线
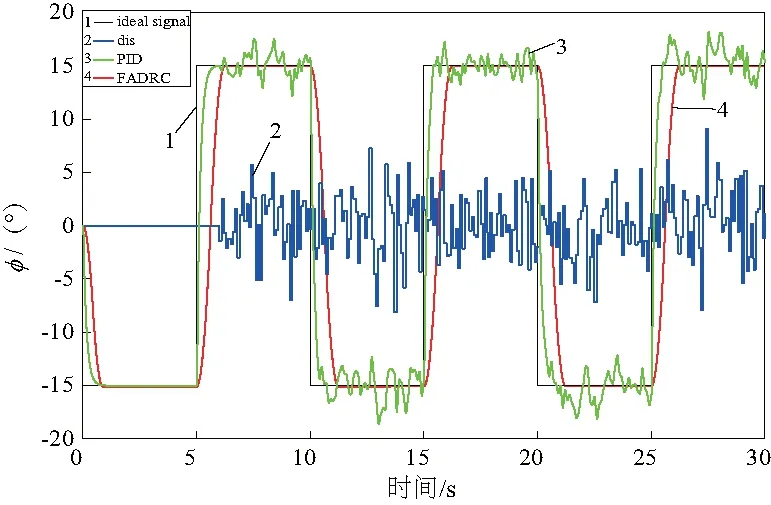
图11 随机风干扰下滚转角响应曲线
仿真结果表明,在向系统中加入基本风、阵风、渐变风和随机风时,本文设计的FADRC控制器所控制的滚转角基本没有变化,而PID所控制的滚转角会受到较大的影响,尤其是在加入随机风时,影响更为剧烈。
以上结果表明,本文设计的FADRC控制器比传统PID控制器具有更好的解耦性、抗干扰性和鲁棒性。
4 结语
本文研究了基于FADRC控制器的四旋翼姿态控制系统。根据无人机姿态动力学数学模型,设计了一种二阶FADRC姿态控制器。在验证控制器抗干扰性和鲁棒性的实验过程中,引入了4种干扰风:基本风、阵风、渐变风和随机风。从仿真结果和与传统PID控制器的比较中可以发现,FADRC控制器可以很好地解决四旋翼飞行器各通道之间的强耦合性问题,同时能够较好地抑制飞行系统中不确定干扰的影响,具有很好的抗干扰性和鲁棒性。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
数学物理学报(2021年2期)2021-06-09
装备制造技术(2021年1期)2021-05-21
军民两用技术与产品(2021年9期)2021-03-09
数学物理学报(2019年5期)2019-11-29
电子制作(2019年9期)2019-05-30
自动化学报(2018年2期)2018-04-12
北京航空航天大学学报(2016年8期)2016-11-16
广东技术师范大学学报(2016年5期)2016-08-22
北京航空航天大学学报(2016年3期)2016-02-27